PID issues or calibration help
- hatch789
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

Less
More
- Posts: 143
- Thank you received: 0
05 Jan 2019 02:34 #123528
by hatch789
Replied by hatch789 on topic PID issues or calibration help
Sure thing OT!
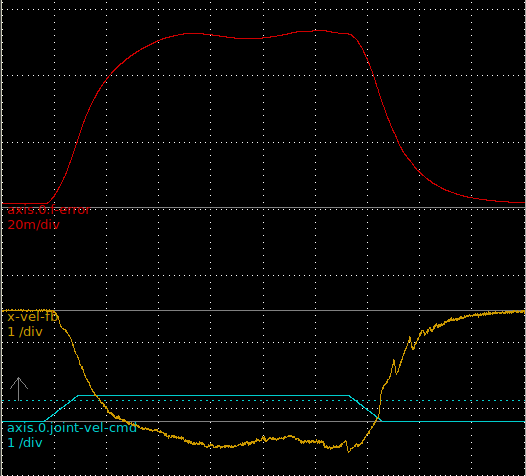
OK Guys, I found how to read my voltage and it appears to be accurate as I checked it on my volt meter at the same time I was watching the screen reading in hal monitor.
When I'm moving in a positive X direction (to the right) my voltage is negative. In this screenshot it is -2.4v.
PCW said about using +10 or -10v to test how fast I'd travel but the most I am pushing right now is about 8.6v or -8.6v depending on which way I go. I'll need to figure out how I can increase that to +/- 10v. Then I can figure out the true ips travel I guess?
OK Guys, I found how to read my voltage and it appears to be accurate as I checked it on my volt meter at the same time I was watching the screen reading in hal monitor.
When I'm moving in a positive X direction (to the right) my voltage is negative. In this screenshot it is -2.4v.
PCW said about using +10 or -10v to test how fast I'd travel but the most I am pushing right now is about 8.6v or -8.6v depending on which way I go. I'll need to figure out how I can increase that to +/- 10v. Then I can figure out the true ips travel I guess?
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17994
- Thank you received: 5281
05 Jan 2019 14:26 #123546
by PCW
Replied by PCW on topic PID issues or calibration help
That does not look like a velocity mode drive,
Can you post the hal/ini files at the same time as the plot?
Can you post the hal/ini files at the same time as the plot?
Please Log in or Create an account to join the conversation.
- hatch789
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 143
- Thank you received: 0
05 Jan 2019 16:05 - 06 Jan 2019 03:23 #123559
by hatch789
Replied by hatch789 on topic PID issues or calibration help
Remember I have resolvers, not encoders. Not sure if that makes a difference.
I just looked to verify and I had already posted my HAL and my INI files in the first message of this thread.
I just looked to verify and I had already posted my HAL and my INI files in the first message of this thread.
Last edit: 06 Jan 2019 03:23 by hatch789.
Please Log in or Create an account to join the conversation.
- hatch789
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 143
- Thank you received: 0
07 Jan 2019 18:03 #123711
by hatch789
Replied by hatch789 on topic PID issues or calibration help
So where do I go from here? If my drives are not velocity mode drives can I still do some kind of calibration or am I just stuck? I'd like to think I can do some things to improve performance and accuracy. Please let me know what you guys think I should do from here...
Remember I'm using Servos with Resolvers here My old WestAmp Analog Servo drivers. I think these are A651 series analog drives. I attached the PDF (Spec) earlier in this thread if anyone wants to see it.
Remember I'm using Servos with Resolvers here My old WestAmp Analog Servo drivers. I think these are A651 series analog drives. I attached the PDF (Spec) earlier in this thread if anyone wants to see it.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 4764
- Thank you received: 1464
07 Jan 2019 18:07 #123712
by Todd Zuercher
Replied by Todd Zuercher on topic PID issues or calibration help
Your drives may be velocity drives that are not functioning properly. (If they are not receiving the tach feed back, or aren't configured correctly.)
Please Log in or Create an account to join the conversation.
- islander261
- Offline
- Platinum Member
-
Less
More
- Posts: 757
- Thank you received: 216
07 Jan 2019 22:16 #123728
by islander261
Replied by islander261 on topic PID issues or calibration help
Your drives are velocity mode servo amplifiers! These were very commonly used on machines the age of yours. The same design was sold as Baldor, Servo Dynamics, Westamp and maybe others over the years with very minor changes. Tune them using the instructions that are commonly available on the web and here then connect to LCNC and tune your PID components. If you just changed cards without transferring the personality header they are most likely NOT tuned to your motors or dynamics anymore.
Who build the original controller and what was the model number?
John
Who build the original controller and what was the model number?
John
Please Log in or Create an account to join the conversation.
- hatch789
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 143
- Thank you received: 0
08 Jan 2019 00:09 #123739
by hatch789
Replied by hatch789 on topic PID issues or calibration help
Hi John,
My controller (I think this is what you mean) is a Westamp Model 29988-5 (Nov-2 1987). I'm not sure what you mean about changed cards do you mean my MESA cards? If that's what you're asking it was written by PCW (I believe) back in 2011 and I have been asking if that's possibly been my problem all along. I don't know if I need another driver as I mention on page 1 or 2 of this thread. I have tried to be as detailed as possible with everything I have posted, noted and recorded here in this thread. I gave my zip of the MESA driver and my HAL / INI files ...I am just at the mercy of those who know more than I do because I'm still trying to learn.
I need a starting point and everyone seems to keep saying well if it's working don't worry about using pncconf so that's cool but I still feel like I need a starting point.
I can tune the WESTAMP to work just fine. I have done this already I have also tried increasing the TC and TACH which does help give faster "settling" but it's also harder on the servos to be pushed too far, so I don't want to try to overdo it with the TC/TACH settings.
Once I have the WESTAMP servo drives working pretty well I don't know where to go with the PID stuff. Seems like there's PID Velocity Tuning, and then after that PID Position tuning?
I'm happy to do a SKYPE session with someone if they're willing to help me out. Otherwise I'll keep working through things a step at a time here.
My controller (I think this is what you mean) is a Westamp Model 29988-5 (Nov-2 1987). I'm not sure what you mean about changed cards do you mean my MESA cards? If that's what you're asking it was written by PCW (I believe) back in 2011 and I have been asking if that's possibly been my problem all along. I don't know if I need another driver as I mention on page 1 or 2 of this thread. I have tried to be as detailed as possible with everything I have posted, noted and recorded here in this thread. I gave my zip of the MESA driver and my HAL / INI files ...I am just at the mercy of those who know more than I do because I'm still trying to learn.
I need a starting point and everyone seems to keep saying well if it's working don't worry about using pncconf so that's cool but I still feel like I need a starting point.
I can tune the WESTAMP to work just fine. I have done this already I have also tried increasing the TC and TACH which does help give faster "settling" but it's also harder on the servos to be pushed too far, so I don't want to try to overdo it with the TC/TACH settings.
Once I have the WESTAMP servo drives working pretty well I don't know where to go with the PID stuff. Seems like there's PID Velocity Tuning, and then after that PID Position tuning?
I'm happy to do a SKYPE session with someone if they're willing to help me out. Otherwise I'll keep working through things a step at a time here.
Please Log in or Create an account to join the conversation.
- islander261
- Offline
- Platinum Member
-
Less
More
- Posts: 757
- Thank you received: 216
08 Jan 2019 06:26 #123751
by islander261
Replied by islander261 on topic PID issues or calibration help
Ok, if you didn't change any of the Westamp cards you should be close. This is the same set of amps I have in my old 1985 mill and they still work well with the original brushed motors and tachs. The big filter cap on the power supply may be getting a little tired by now, electrolytic caps don't last forever, but that should really show up as 50hz or 60hz problems at near full power. You have two things that must work correctly, the servo amps/motors and resolvers before you have any hope of getting your PID components tuned. If you cannot get all the mechanical bits working well then you really have no hope of getting the electronics to run the mill well.
Follow the instructions starting on page 9 of the Westamp book to tune the servo cards, you should be close now if the cards were never changed. Look at the trouble shooting tips on page 11 of the Westamp book and make sure none of those conditions are present. Pay particular attention to the cleanliness around the commutator for both the motors and the tachs. With power removed use your measuring instruments to check for backlash, use hand feel to check for any stiction or binding of the ways or ball screws. Use a 1.5 volt battery as a signal source to set the signal gain of your amps. Sorry I don't know the design speed of your motors so you will need to figure it out. Shoot for scaling that will have the motor running at near max continuous design speed ( (max axis speed / ball screw pitch)/ X reduction ratio) for a 10V input. You will need to disconnect the motors from the mechanics for this.
Now I haven't used the Mesa resolver cards or the analog cards. Keeping the servo amps powered off move the axis by hand and watch the DRO for correct operation against instruments, check for backlash and linearity, there are several mechanical parts connected together and any of the connections can be bad. You must have the feedback working correctly before trying to tune the PID components. There should be no apparent backlash or offsets with the DRO following manual movement of the axis. If there are then you have a problem with the resolver feedback that needs to be fixed.
You can move your axis in the correct directions and speeds so you are done with pncconf.
You are going to use one instance of the PID component for each axis to close the position loop. The output of the PID components will be a velocity commands to your servo amps via the mesa cards.
What is SKYPE?
John
Follow the instructions starting on page 9 of the Westamp book to tune the servo cards, you should be close now if the cards were never changed. Look at the trouble shooting tips on page 11 of the Westamp book and make sure none of those conditions are present. Pay particular attention to the cleanliness around the commutator for both the motors and the tachs. With power removed use your measuring instruments to check for backlash, use hand feel to check for any stiction or binding of the ways or ball screws. Use a 1.5 volt battery as a signal source to set the signal gain of your amps. Sorry I don't know the design speed of your motors so you will need to figure it out. Shoot for scaling that will have the motor running at near max continuous design speed ( (max axis speed / ball screw pitch)/ X reduction ratio) for a 10V input. You will need to disconnect the motors from the mechanics for this.
Now I haven't used the Mesa resolver cards or the analog cards. Keeping the servo amps powered off move the axis by hand and watch the DRO for correct operation against instruments, check for backlash and linearity, there are several mechanical parts connected together and any of the connections can be bad. You must have the feedback working correctly before trying to tune the PID components. There should be no apparent backlash or offsets with the DRO following manual movement of the axis. If there are then you have a problem with the resolver feedback that needs to be fixed.
You can move your axis in the correct directions and speeds so you are done with pncconf.
You are going to use one instance of the PID component for each axis to close the position loop. The output of the PID components will be a velocity commands to your servo amps via the mesa cards.
What is SKYPE?
John
Please Log in or Create an account to join the conversation.
- hatch789
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 143
- Thank you received: 0
08 Jan 2019 20:04 - 08 Jan 2019 20:05 #123789
by hatch789
Replied by hatch789 on topic PID issues or calibration help
Hi John,
I don't have a Westamp book or electronic copy. I only have a PDF version of an old Instruction manual but it was for my OLD westamp driver board (A 651 series) that I don't have anymore. If you have a newer PDF do you mind sharing it with me please? My new model # is: 29988-5 ...same as you from what you said. It is possible this has been a pretty large part of my problem?
I'm not sure how to figure out what the max design speed for my servos is? I will have to really do some digging on that.
Skype is a program (skype.com) to allow people to talk and even do video chat or screen sharing over their computer. It's conference call software on steroids.
I don't have a Westamp book or electronic copy. I only have a PDF version of an old Instruction manual but it was for my OLD westamp driver board (A 651 series) that I don't have anymore. If you have a newer PDF do you mind sharing it with me please? My new model # is: 29988-5 ...same as you from what you said. It is possible this has been a pretty large part of my problem?
I'm not sure how to figure out what the max design speed for my servos is? I will have to really do some digging on that.
Skype is a program (skype.com) to allow people to talk and even do video chat or screen sharing over their computer. It's conference call software on steroids.
Last edit: 08 Jan 2019 20:05 by hatch789.
Please Log in or Create an account to join the conversation.
- islander261
- Offline
- Platinum Member
-
Less
More
- Posts: 757
- Thank you received: 216
08 Jan 2019 23:27 #123800
by islander261
Replied by islander261 on topic PID issues or calibration help
Ok, the Westamp part number 29988-5 appears to be for the chassis and power supply the servo amp assemblies bolt to. Yes, if you just replaced the whole chassis including the servo amps without tuning it can be one of your problems. Please post a photo of the actual servo amps you are using. An additional one of the board part number will help.
I actually think that your problem may be else where ( mechanical or resolver related). So the first thing is to checkout the mechanics for any problems while making sure the resolvers are tracking correctly. To tune this system you must be absolutely certain that the mechanics and resolver feedback are working correctly or you are just wasting time.
The servo motor speed you need for each axis is:( (rapid traverse speed/ ball screw pitch) X reduction ratio) + a few percent headroom
Remember to keep your units consistent.
John
I actually think that your problem may be else where ( mechanical or resolver related). So the first thing is to checkout the mechanics for any problems while making sure the resolvers are tracking correctly. To tune this system you must be absolutely certain that the mechanics and resolver feedback are working correctly or you are just wasting time.
The servo motor speed you need for each axis is:( (rapid traverse speed/ ball screw pitch) X reduction ratio) + a few percent headroom
Remember to keep your units consistent.
John
Please Log in or Create an account to join the conversation.
Time to create page: 0.304 seconds