ASD-A2 EtherCAT on LinuxCNC
- jirkam
- Offline
- Senior Member
-

- Posts: 75
- Thank you received: 9
FERROR = 100
MIN_FERROR = 100
P = 5
DEADBAND = 0.0001
MAX_OUTPUT = 230
The rest = 0
I set FF1 to 0.1; 0.2; 0.3; 0.5; 0.8; 1.0; 10; 20; 30; 50; 100; 150 and no change to the "joint.0.f-error" curve.
Each time I click on the cursor left or right (do not hold), the "joint.0.f-error" changes by about 2mm and returns to zero for 30 seconds.
Ends with "joint.0.f-error" = 0.42mm.
Can you please advise me what he's doing wrong?
Thank you very much.
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-

- Posts: 295
- Thank you received: 125
I work in speed mode with ethercat servo drive,
It depends on how you have configured the speed mode in the drive., in the DELTA manual I see that for a 3000 rpm motor you need to enter a command of 30,000, then you would have to try
setp lcec.0.x.srv-velo-cmd 30000setp lcec.0.x.srv-velo-cmd 15000Now let's configure the PID
P = 1
I = 0
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
DEBAND = 0
MAX_OUTPUT 30000
Now it has to work
Now adjust P until it starts to vibrate and lower it a little, my house is around 200
then surely you lack acceleration
configure the parameters
P1-34
P1-35
I hope I helped you
Cheers
Chimeno
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
P1-34 and P1-35 I have 1000ms.
I just wondered if I didn't have an unnecessarily high resolution.
P1-44 = 1280 and P1-45 = 15.
Must P2-60, P2-61 and P2-62 be the same as P1-44?
I have all three parameters of 1280 pulses.
Thank you very much jirka
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
Thank you very much for the instructions. I'll try it tomorrow.
P1-34 and P1-35 I have 1000ms.
It depends on the values that you have placed in the .ini file and also on those that you need the machine to move quickly.
these are the parameters that you will have to change
MAX_VELOCITY = 250
MAX_ACCELERATION = 1500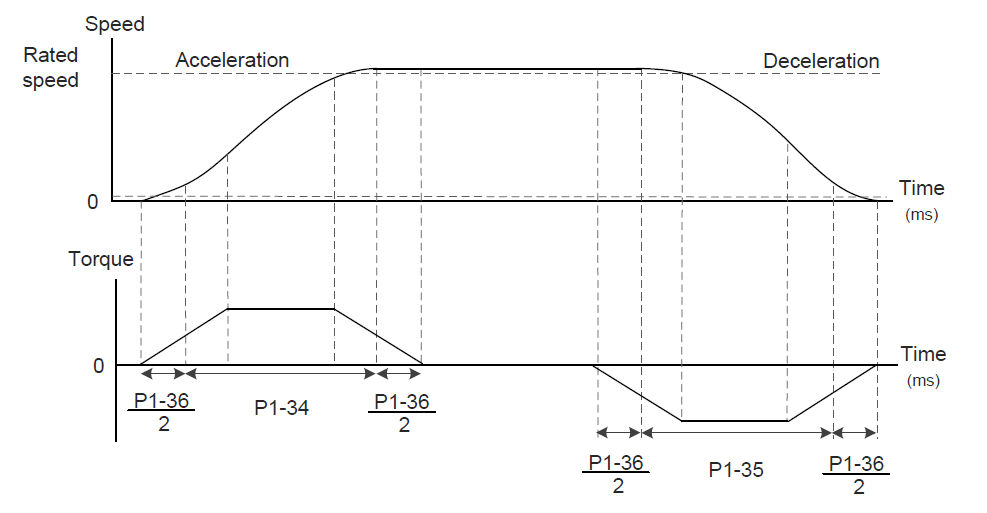
these values are for the reducer, I think it may be better to do the tests leave it at 1 and configure the ratio in linuxcncI just wondered if I didn't have an unnecessarily high resolution.
P1-44 = 1280 and P1-45 = 15.
setp lcec.0.x.srv-scale [JOINT_0]SCALESCALE = 0.2Greeting
Chimeno
Attachments:
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
"lcec.0.x.srv-velo-cmd" refuses me.
Did you mean "lcec.0.x.srv-vel-cmd"? That was ok.
I setup:
P = 1 (gradually increased up to 25,000)
I = 0
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
DEBAND = 0
MAX_OUTPUT 30000
and still a huge f-error.
I changed the encoder settings (P1-44 = 1 and P1-45 = 1)
SCALE = 15
and it was better.
I ended up here:
P = 130
I = 0
D = 0
FF0 = 0
FF1 = 1.12
FF2 = 0.006
DEBAND = 0
MAX_OUTPUT 30000
The result in the pictures. It's a spiral again.
I don't think it's ok.
How to improve it?
Thanks jirka
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
"lcec.0.x.srv-velo-cmd" me rechaza.
¿Quiso decir "lcec.0.x.srv-vel-cmd"? Eso estuvo bien.have you given him more acceleration?
P1-34
P1-35
can you measure the engine revolutions with this command?
setp lcec.0.x.srv-vel-cmd 15000Greetting
Chimeno
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
I only set the acceleration to 1500 in Lcnc.
Visible change in acceleration.
But I will try to set the acceleration of both P1-34 and P1-35.
I thought it would be enough to set up Lcnc.
"setp lcec.0.x.srv-vel-cmd 15000"
Do you mean measurement in HALscope?
Thanks jirka
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
Here are the pictures with "lcec.0.x.srv-velo-cmd".
It's a spiral again.
P = 120
I = 0
D = 0
FF0 = 0
FF1 = 1.12
FF2 = 0.006
DEBAND = 0
MAX_OUTPUT 30000
SCALE = 15
P1-34 = 200
P1-35 = 200
Thanks jirka
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

- Posts: 21658
- Thank you received: 7399
I might be wrong though as i never checked, but i also never needed to go over it to tune a servo system.
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
Replenishment.
I forgot to change one parameter in the .ini.
MAX_ACCELERATION = 1500.0
This is how the curve changed.
Thanks jirka
Please Log in or Create an account to join the conversation.