ASD-A2 EtherCAT on LinuxCNC
- jirkam
- Offline
- Senior Member
-

- Posts: 75
- Thank you received: 9
Thank you very much for the pictures.
What was the error in the oscilloscope?
Is it even realistic to achieve a better result than 0.002 mm with Delta?
I discovered new facts.
The X axis is ok. There is an error of 0.0025 mm. See "result.png

But for the Y-axis (gantry), I found that both servos were arguing. At least I think according to the picture "2xY.png". It is at a manual crossing of 18000mm / min. The eye can see how the portal vibrates.
I don't know how to set it up to improve.
Due to inaccurate combs I have to use Y1.comp file and Y.comp file. And it will be more complicated.
Thank you so much for the ideas.
Jirka
Attachments:
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
About ok.
Jirka
Attachments:
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-

- Posts: 295
- Thank you received: 125
I did the tests with new servos, the error was 0.0155, I have not adjusted the servos.What was the error in the oscilloscope?
the truth is that I get better results with PID in linuxcnc at high speeds I think not,Is it even realistic to achieve a better result than 0.002 mm with Delta?
it's very good!El eje X está bien. Hay un error de 0,0025 mm. Ver "result.png
I did not realize that you were using a gate with 2 motors, I find it quite difficult to configure two PIDs to feed 2 motors at the same time and that its precision is extreme, I think that if you need such precision you could try to re-set the controller mode and go to position mode, leaving the PID in the servo drive, and the portico having a master motor and another slave, all configured in the servo drive, leaving linuxcnc free of heavy load. I'm not an expert and there are so many guys on the forum that you sure have a better ideaBut for the Y-axis (gantry), I found that both servos were arguing. At least I think according to the picture "2xY.png". It is at a manual crossing of 18000mm / min. The eye can see how the portal vibrates.
I don't know how to set it up to improve.
Due to inaccurate combs I have to use Y1.comp file and Y.comp file. And it will be more complicated.
Thank you so much for the ideas.
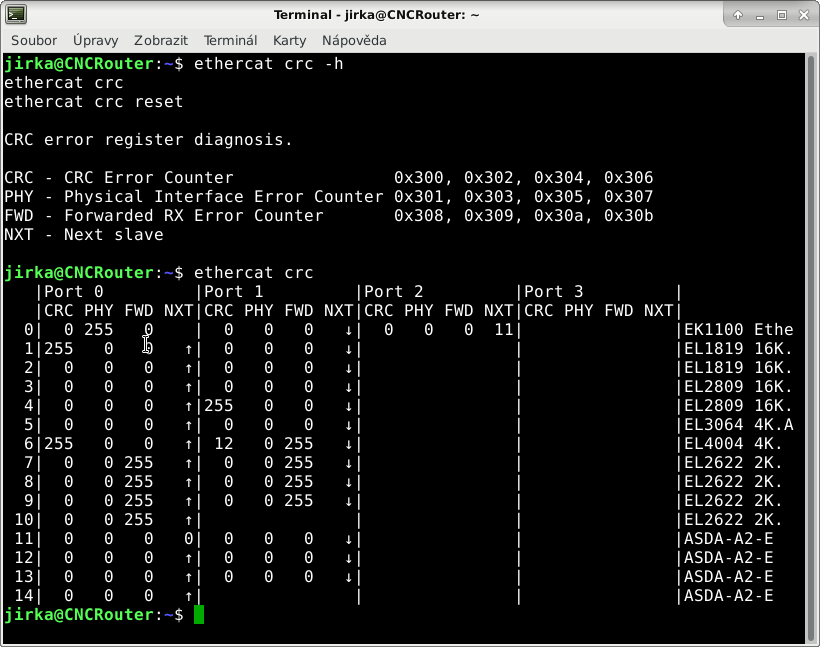
have you used it as
ethercat crcI'm sorry I'm not much more helpful
Greeting
Chimeno
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
Thanks for the information and for your opinion.
I try to avoid switching to position control. Because I don't know how to do it. I'm a linuxcnc amateur.
I cannot use the "master-slave" servo control. The toothed combs are very inaccurate and I have to use "COMP_FILE" Y1.comp and Y2.comp.
And if I understood the "master-slave" servo control well, I don't think COMP_FILE will help me.
Yes, I tried "ethercat crc" when spiral milling.
Thanks so much for your time.
Jirka
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
I am also a fan of linuxcnc, I hope everything goes very well!
Greeting
Chimeno
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
I have fine-tuned the position control (thanks to a smarter colleague from the forum) and I can do it with an accuracy of a few thousandths. It is super.
But ...
")
The video "" shows how it goes without any problems.
It's not okay on the video "". It starts to show such errors, which do not affect the milling in any way, but in about 30 seconds of the video it goes to a worse variant - it can be heard on the servos and sometimes it ends with an error.
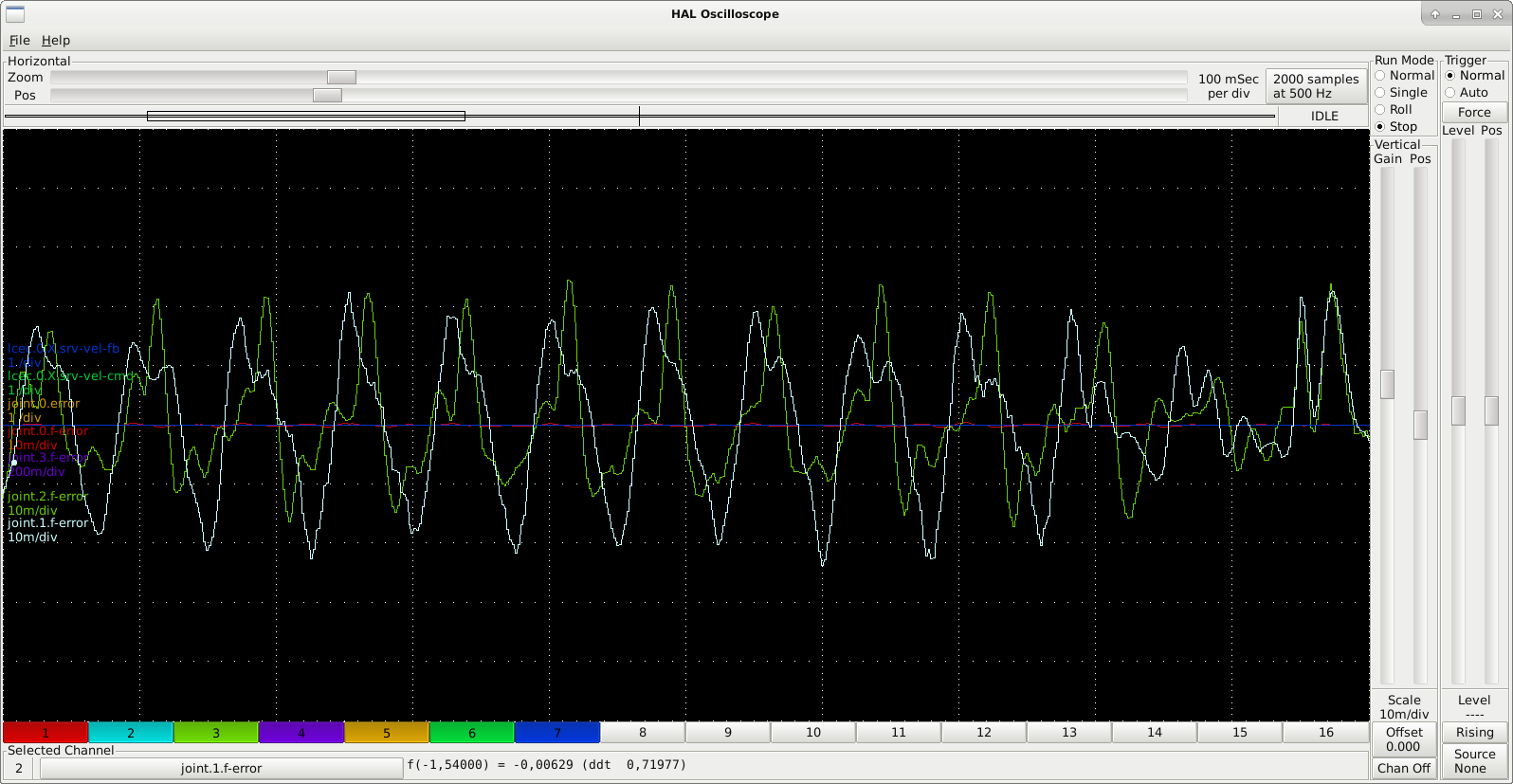
I know it depends on what's coming from Lcnc. I may have managed to capture this in the image vrceni.png.
This is a situation where the servo growls - the sound is heard and can be seen on the graph.
I don't understand why it sometimes runs for two hours without a mistake, then it growls for two seconds and continues for an hour, ok.
Then there are days when it growls from morning then does not growl for a while.
Other times, after an hour of milling, it starts to growl and Linux bugs crash.
It does it differently in all three axes. It does not depend on the movement of two axes - it only goes in X, for example, and suddenly it starts to growl.
I found no dependence on anything.
Can't think of where the problem might be?
Thank you very much and have a nice day.
Jirka
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
I am very glad that it works perfectly for you, it may be that you have some kind of deviation in the synchronism on the clock of the ethercat bus, you can examine the time of lcec in hal using halcope, if this were the problem the solution would be to install the add-tasks -pll-functions-2.8.patch.
Greeting
Chimeno
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
I will definitely try.
Thank you
Jirka
Please Log in or Create an account to join the conversation.
- manojpatil
- Offline
- New Member
-

- Posts: 10
- Thank you received: 0
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
I already had pll-functions-2.8.patch installed.
I set up .xml like this:
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="-1">
<slave idx="0" type="EK1100" name="EK1100"/>
<slave idx="1" type="EL1819" name="DIN1"/>
<slave idx="2" type="EL1819" name="DIN2"/>
<slave idx="3" type="EL1088" name="DIN3"/>
<slave idx="4" type="EL2809" name="DOUT1"/>
<slave idx="5" type="EL2809" name="DOUT2"/>
<slave idx="6" type="EL3064" name="AIN"/>
<slave idx="7" type="EL4004" name="AOUT"/>
<slave idx="8" type="EL2622" name="RELE1"/>
<slave idx="9" type="EL2622" name="RELE2"/>
<slave idx="10" type="EL2622" name="RELE3"/>
<slave idx="11" type="EL2622" name="RELE4"/>
<slave idx="12" type="DeASDA" name="X">
<dcConf assignActivate="730" sync0Cycle="250000" sync0Shift="0" sync1Cycle="750000" sync1Shift="0"/>
</slave>
<slave idx="13" type="DeASDA" name="Y1">
<dcConf assignActivate="730" sync0Cycle="250000" sync0Shift="0" sync1Cycle="750000" sync1Shift="0"/>
</slave>
<slave idx="14" type="DeASDA" name="Y2">
<dcConf assignActivate="730" sync0Cycle="250000" sync0Shift="0" sync1Cycle="750000" sync1Shift="0"/>
</slave>
<slave idx="15" type="DeASDA" name="Z">
<dcConf assignActivate="730" sync0Cycle="250000" sync0Shift="0" sync1Cycle="750000" sync1Shift="0"/>
</slave>
</master>
</masters>
Unfortunately, the servos are still growling.
Can you think of a solution?
Thank you very much Jirka
Please Log in or Create an account to join the conversation.