ASD-A2 EtherCAT on LinuxCNC
- chimeno
- Offline
- Elite Member
-

- Posts: 295
- Thank you received: 125
The MAX_OUTPUT value also changes depending on the scale you have
lcec.0.x.srv-scale1 - put the screen in RPM display mode
2 - my scale is
lcec.0.x.srv-scale 0.23 - use this command
sept lcec.0.x.srv-velo-cmdlcec.0.x.enc-posthese are the values
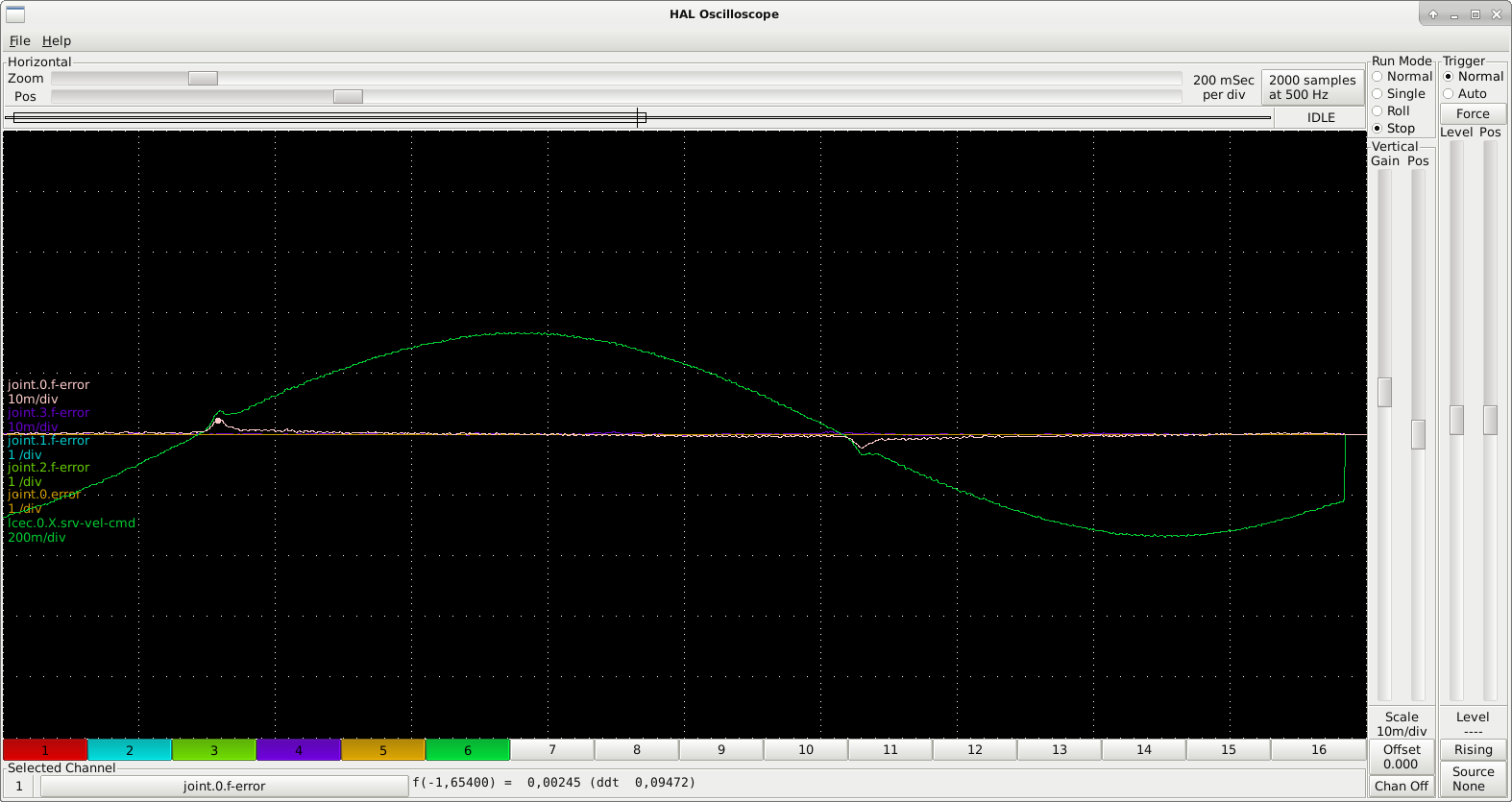
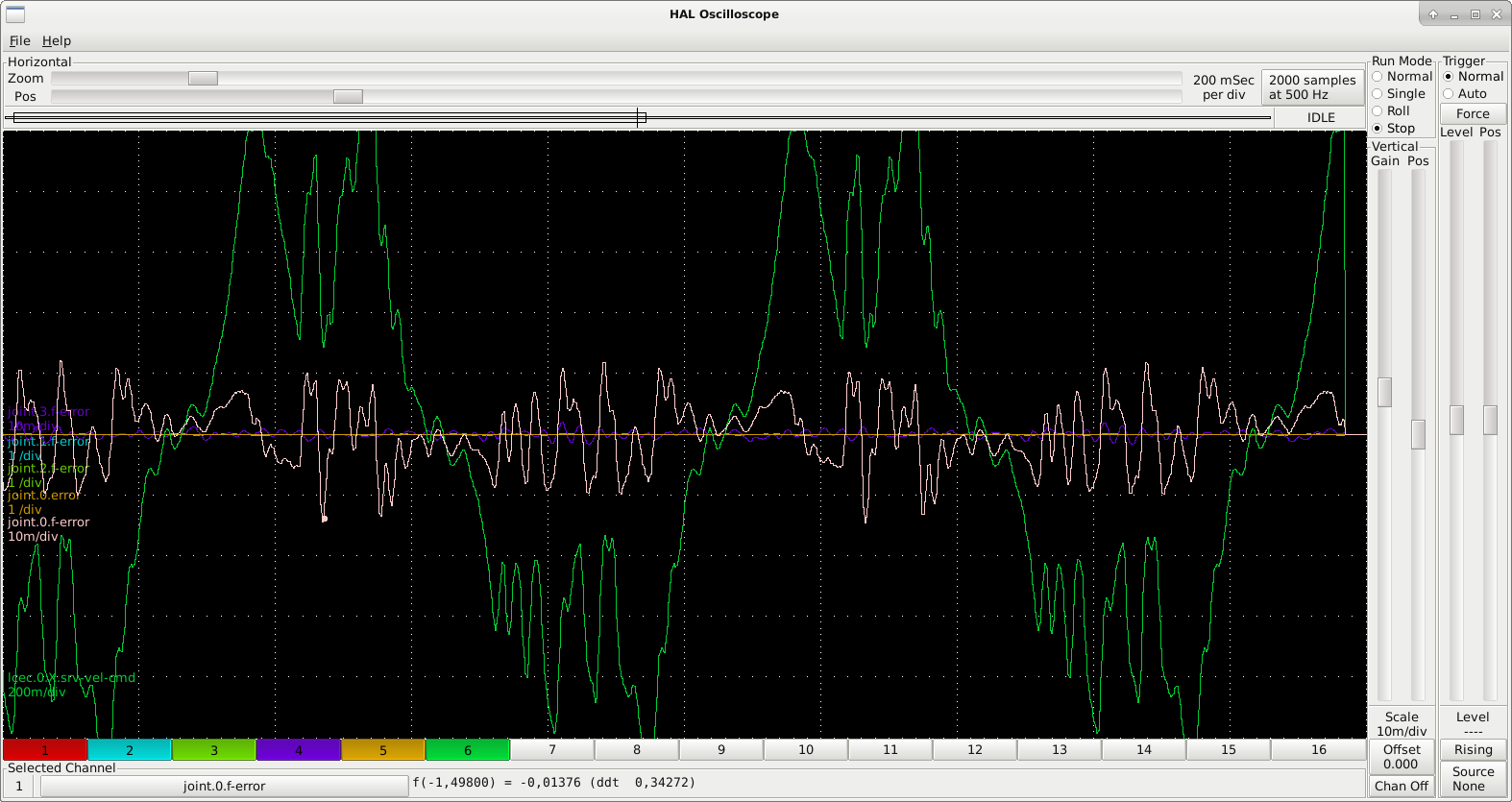
setp lcec.0.x.srv-velo-cmd 500setp lcec.0.x.srv-velo-cmd 250After I got the correct scale, I started adjusting the PID,
I hope that in the end everything goes well for you!
Greeting
Chimeno
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-

- Posts: 75
- Thank you received: 9
Thank you very much for your advice.
I'll try it tomorrow.
Today's tests.
It is again a spiral with a speed of 300 mm / min and the same with a speed of 1200 mm / min. But it runs at a maximum speed of 800 mm / min.
Thanks Jirka
Attachments:
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
So I tried and I'm doing something wrong.
I wrote
#net x-pos-fb <= lcec.0.X.enc-pos-enc
setp lcec.0.x.srv-vel-cmd with various values from 0.1 to 30000
and the engine still rotates 4,970 rpm (+/- 20 rpm)
I guess I misunderstood your description.
I probably don't have lcec.0.x.srv-scale.
Here's the pins
Component Pins:
Owner Type Dir Value Name
33 float IN 0 a-pid.Dgain
33 float IN 0 a-pid.FF0
33 float IN 128 a-pid.FF1
33 float IN 0.45 a-pid.FF2
33 float IN 0 a-pid.FF3
33 float IN 0 a-pid.Igain
33 float IN 10000 a-pid.Pgain
33 float IN 0 a-pid.bias
33 float IN 0.2205938 a-pid.command <== a-pos-cmd
33 float IN 0 a-pid.command-deriv
33 float IN 0.0001 a-pid.deadband
33 s32 OUT 198 a-pid.do-pid-calcs.time
33 bit IN TRUE a-pid.enable <== a-enable
33 float OUT 0 a-pid.error
33 bit IN TRUE a-pid.error-previous-target
33 float IN 0.2205938 a-pid.feedback <== a-pos-fb
33 float IN 0 a-pid.feedback-deriv
33 bit IN FALSE a-pid.index-enable
33 float IN 0 a-pid.maxcmdD
33 float IN 0 a-pid.maxcmdDD
33 float IN 0 a-pid.maxcmdDDD
33 float IN 0 a-pid.maxerror
33 float IN 0 a-pid.maxerrorD
33 float IN 0 a-pid.maxerrorI
33 float IN 200000 a-pid.maxoutput
33 float OUT 0 a-pid.output ==> a-vel-cmd
33 bit OUT FALSE a-pid.saturated
33 s32 OUT 0 a-pid.saturated-count
33 float OUT 0 a-pid.saturated-s
36 float IN 0 abs.spindle.in <== spindle-vel-cmd
36 bit OUT FALSE abs.spindle.is-negative
36 bit OUT FALSE abs.spindle.is-positive
36 float OUT 0 abs.spindle.out ==> absolute-spindle-vel
36 bit OUT FALSE abs.spindle.sign
36 s32 OUT 306 abs.spindle.time
19 float OUT 0 axis.a.eoffset
19 bit IN FALSE axis.a.eoffset-clear
19 s32 IN 0 axis.a.eoffset-counts
19 bit IN FALSE axis.a.eoffset-enable
19 float OUT 0 axis.a.eoffset-request
19 float IN 0 axis.a.eoffset-scale
19 float IN 1 axis.a.jog-accel-fraction
19 s32 IN 0 axis.a.jog-counts
19 bit IN FALSE axis.a.jog-enable
19 float IN 0 axis.a.jog-scale
19 bit IN FALSE axis.a.jog-vel-mode
19 bit OUT FALSE axis.a.kb-jog-active
19 float OUT 0.2205938 axis.a.pos-cmd
19 float OUT 0.2205938 axis.a.teleop-pos-cmd
19 bit OUT FALSE axis.a.teleop-tp-enable
19 float OUT 0 axis.a.teleop-vel-cmd
19 float OUT 0 axis.a.teleop-vel-lim
19 bit OUT FALSE axis.a.wheel-jog-active
19 float OUT 0 axis.b.eoffset
19 bit IN FALSE axis.b.eoffset-clear
19 s32 IN 0 axis.b.eoffset-counts
19 bit IN FALSE axis.b.eoffset-enable
19 float OUT 0 axis.b.eoffset-request
19 float IN 0 axis.b.eoffset-scale
19 float IN 1 axis.b.jog-accel-fraction
19 s32 IN 0 axis.b.jog-counts
19 bit IN FALSE axis.b.jog-enable
19 float IN 0 axis.b.jog-scale
19 bit IN FALSE axis.b.jog-vel-mode
19 bit OUT FALSE axis.b.kb-jog-active
19 float OUT 0 axis.b.pos-cmd
19 float OUT 0 axis.b.teleop-pos-cmd
19 bit OUT FALSE axis.b.teleop-tp-enable
19 float OUT 0 axis.b.teleop-vel-cmd
19 float OUT 0 axis.b.teleop-vel-lim
19 bit OUT FALSE axis.b.wheel-jog-active
19 float OUT 0 axis.c.eoffset
19 bit IN FALSE axis.c.eoffset-clear
19 s32 IN 0 axis.c.eoffset-counts
19 bit IN FALSE axis.c.eoffset-enable
19 float OUT 0 axis.c.eoffset-request
19 float IN 0 axis.c.eoffset-scale
19 float IN 1 axis.c.jog-accel-fraction
19 s32 IN 0 axis.c.jog-counts
19 bit IN FALSE axis.c.jog-enable
19 float IN 0 axis.c.jog-scale
19 bit IN FALSE axis.c.jog-vel-mode
19 bit OUT FALSE axis.c.kb-jog-active
19 float OUT 0 axis.c.pos-cmd
19 float OUT 0 axis.c.teleop-pos-cmd
19 bit OUT FALSE axis.c.teleop-tp-enable
19 float OUT 0 axis.c.teleop-vel-cmd
19 float OUT 0 axis.c.teleop-vel-lim
19 bit OUT FALSE axis.c.wheel-jog-active
19 float OUT 0 axis.u.eoffset
19 bit IN FALSE axis.u.eoffset-clear
19 s32 IN 0 axis.u.eoffset-counts
19 bit IN FALSE axis.u.eoffset-enable
19 float OUT 0 axis.u.eoffset-request
19 float IN 0 axis.u.eoffset-scale
19 float IN 1 axis.u.jog-accel-fraction
19 s32 IN 0 axis.u.jog-counts
19 bit IN FALSE axis.u.jog-enable
19 float IN 0 axis.u.jog-scale
19 bit IN FALSE axis.u.jog-vel-mode
19 bit OUT FALSE axis.u.kb-jog-active
19 float OUT 0 axis.u.pos-cmd
19 float OUT 0 axis.u.teleop-pos-cmd
19 bit OUT FALSE axis.u.teleop-tp-enable
19 float OUT 0 axis.u.teleop-vel-cmd
19 float OUT 0 axis.u.teleop-vel-lim
19 bit OUT FALSE axis.u.wheel-jog-active
19 float OUT 0 axis.v.eoffset
19 bit IN FALSE axis.v.eoffset-clear
19 s32 IN 0 axis.v.eoffset-counts
19 bit IN FALSE axis.v.eoffset-enable
19 float OUT 0 axis.v.eoffset-request
19 float IN 0 axis.v.eoffset-scale
19 float IN 1 axis.v.jog-accel-fraction
19 s32 IN 0 axis.v.jog-counts
19 bit IN FALSE axis.v.jog-enable
19 float IN 0 axis.v.jog-scale
19 bit IN FALSE axis.v.jog-vel-mode
19 bit OUT FALSE axis.v.kb-jog-active
19 float OUT 0 axis.v.pos-cmd
19 float OUT 0 axis.v.teleop-pos-cmd
19 bit OUT FALSE axis.v.teleop-tp-enable
19 float OUT 0 axis.v.teleop-vel-cmd
19 float OUT 0 axis.v.teleop-vel-lim
19 bit OUT FALSE axis.v.wheel-jog-active
19 float OUT 0 axis.w.eoffset
19 bit IN FALSE axis.w.eoffset-clear
19 s32 IN 0 axis.w.eoffset-counts
19 bit IN FALSE axis.w.eoffset-enable
19 float OUT 0 axis.w.eoffset-request
19 float IN 0 axis.w.eoffset-scale
19 float IN 1 axis.w.jog-accel-fraction
19 s32 IN 0 axis.w.jog-counts
19 bit IN FALSE axis.w.jog-enable
19 float IN 0 axis.w.jog-scale
19 bit IN FALSE axis.w.jog-vel-mode
19 bit OUT FALSE axis.w.kb-jog-active
19 float OUT 0 axis.w.pos-cmd
19 float OUT 0 axis.w.teleop-pos-cmd
19 bit OUT FALSE axis.w.teleop-tp-enable
19 float OUT 0 axis.w.teleop-vel-cmd
19 float OUT 0 axis.w.teleop-vel-lim
19 bit OUT FALSE axis.w.wheel-jog-active
19 float OUT 0 axis.x.eoffset
19 bit IN FALSE axis.x.eoffset-clear
19 s32 IN 0 axis.x.eoffset-counts
19 bit IN FALSE axis.x.eoffset-enable
19 float OUT 0 axis.x.eoffset-request
19 float IN 0 axis.x.eoffset-scale
19 float IN 1 axis.x.jog-accel-fraction
19 s32 IN 0 axis.x.jog-counts
19 bit IN FALSE axis.x.jog-enable
19 float IN 0 axis.x.jog-scale
19 bit IN FALSE axis.x.jog-vel-mode
19 bit OUT FALSE axis.x.kb-jog-active
19 float OUT 367.7317 axis.x.pos-cmd
19 float OUT 367.7317 axis.x.teleop-pos-cmd
19 bit OUT FALSE axis.x.teleop-tp-enable
19 float OUT 0 axis.x.teleop-vel-cmd
19 float OUT 300 axis.x.teleop-vel-lim
19 bit OUT FALSE axis.x.wheel-jog-active
19 float OUT 0 axis.y.eoffset
19 bit IN FALSE axis.y.eoffset-clear
19 s32 IN 0 axis.y.eoffset-counts
19 bit IN FALSE axis.y.eoffset-enable
19 float OUT 0 axis.y.eoffset-request
19 float IN 0 axis.y.eoffset-scale
19 float IN 1 axis.y.jog-accel-fraction
19 s32 IN 0 axis.y.jog-counts
19 bit IN FALSE axis.y.jog-enable
19 float IN 0 axis.y.jog-scale
19 bit IN FALSE axis.y.jog-vel-mode
19 bit OUT FALSE axis.y.kb-jog-active
19 float OUT 802.9263 axis.y.pos-cmd
19 float OUT 802.9263 axis.y.teleop-pos-cmd
19 bit OUT FALSE axis.y.teleop-tp-enable
19 float OUT 0 axis.y.teleop-vel-cmd
19 float OUT 200 axis.y.teleop-vel-lim
19 bit OUT FALSE axis.y.wheel-jog-active
19 float OUT 0 axis.z.eoffset
19 bit IN FALSE axis.z.eoffset-clear
19 s32 IN 0 axis.z.eoffset-counts
19 bit IN FALSE axis.z.eoffset-enable
19 float OUT 0 axis.z.eoffset-request
19 float IN 0 axis.z.eoffset-scale
19 float IN 1 axis.z.jog-accel-fraction
19 s32 IN 0 axis.z.jog-counts
19 bit IN FALSE axis.z.jog-enable
19 float IN 0 axis.z.jog-scale
19 bit IN FALSE axis.z.jog-vel-mode
19 bit OUT FALSE axis.z.kb-jog-active
19 float OUT 208.1626 axis.z.pos-cmd
19 float OUT 208.1626 axis.z.teleop-pos-cmd
19 bit OUT FALSE axis.z.teleop-tp-enable
19 float OUT 0 axis.z.teleop-vel-cmd
19 float OUT 0 axis.z.teleop-vel-lim
19 bit OUT FALSE axis.z.wheel-jog-active
98 float OUT 40 boundaries.max_lim_x
98 float OUT 100 boundaries.max_lim_y
98 float OUT 10 boundaries.max_lim_z
98 float OUT 25 boundaries.mid_lim_x
98 float OUT 55 boundaries.mid_lim_y
98 float OUT 5.5 boundaries.mid_lim_z
98 float OUT 10 boundaries.min_lim_x
98 float OUT 10 boundaries.min_lim_y
98 float OUT 1 boundaries.min_lim_z
49 float IN 0 conv-float-s32.0.in <== convert_f_s32_in
49 s32 OUT 0 conv-float-s32.0.out ==> convert_f_s32_out
49 bit OUT FALSE conv-float-s32.0.out-of-range
49 s32 OUT 192 conv-float-s32.0.time
52 s32 IN 0 conv-s32-float.0.in
52 float OUT 0 conv-s32-float.0.out
52 s32 OUT 210 conv-s32-float.0.time
80 bit IN FALSE gladevcp.hal_led_auto_rott
80 bit IN TRUE gladevcp.hal_led_set_m6
80 bit IN TRUE gladevcp.hal_led_set_zero
69 float OUT 0 gmoccapy.blockheight
69 bit IN FALSE gmoccapy.delete-message
69 bit OUT FALSE gmoccapy.error
69 bit IN FALSE gmoccapy.feed.feed-override.analog-enable
69 bit IN FALSE gmoccapy.feed.feed-override.count-enable
69 s32 IN 0 gmoccapy.feed.feed-override.counts
69 float IN 0 gmoccapy.feed.feed-override.direct-value
69 bit IN FALSE gmoccapy.feed.reset-feed-override
69 bit IN FALSE gmoccapy.h-button.button-0
69 bit IN FALSE gmoccapy.h-button.button-1
69 bit IN FALSE gmoccapy.h-button.button-2
69 bit IN FALSE gmoccapy.h-button.button-3
69 bit IN FALSE gmoccapy.h-button.button-4
69 bit IN FALSE gmoccapy.h-button.button-5
69 bit IN FALSE gmoccapy.h-button.button-6
69 bit IN FALSE gmoccapy.h-button.button-7
69 bit IN FALSE gmoccapy.h-button.button-8
69 bit IN FALSE gmoccapy.h-button.button-9
69 bit IN FALSE gmoccapy.ignore-limits
69 bit IN FALSE gmoccapy.jog.axis.jog-a-minus
69 bit IN FALSE gmoccapy.jog.axis.jog-a-plus
69 bit IN FALSE gmoccapy.jog.axis.jog-x-minus
69 bit IN FALSE gmoccapy.jog.axis.jog-x-plus
69 bit IN FALSE gmoccapy.jog.axis.jog-y-minus
69 bit IN FALSE gmoccapy.jog.axis.jog-y-plus
69 bit IN FALSE gmoccapy.jog.axis.jog-z-minus
69 bit IN FALSE gmoccapy.jog.axis.jog-z-plus
69 bit IN FALSE gmoccapy.jog.jog-inc-0
69 bit IN FALSE gmoccapy.jog.jog-inc-1
69 bit IN FALSE gmoccapy.jog.jog-inc-2
69 bit IN FALSE gmoccapy.jog.jog-inc-3
69 bit IN FALSE gmoccapy.jog.jog-inc-4
69 bit IN FALSE gmoccapy.jog.jog-inc-5
69 bit IN FALSE gmoccapy.jog.jog-inc-6
69 float OUT 0 gmoccapy.jog.jog-increment
69 bit IN FALSE gmoccapy.jog.jog-velocity.analog-enable
69 bit IN FALSE gmoccapy.jog.jog-velocity.count-enable
69 s32 IN 0 gmoccapy.jog.jog-velocity.counts
69 float IN 0 gmoccapy.jog.jog-velocity.direct-value
69 bit IN FALSE gmoccapy.jog.turtle-jog
69 float OUT 0 gmoccapy.probeheight
69 float OUT 100 gmoccapy.probevel
69 s32 OUT 0 gmoccapy.program.current-line
69 s32 OUT 133 gmoccapy.program.length
69 float OUT 0 gmoccapy.program.progress
69 bit IN FALSE gmoccapy.rapid.rapid-override.analog-enable
69 bit IN FALSE gmoccapy.rapid.rapid-override.count-enable
69 s32 IN 0 gmoccapy.rapid.rapid-override.counts
69 float IN 0 gmoccapy.rapid.rapid-override.direct-value
69 bit IN FALSE gmoccapy.rapid.reset-rapid-override
69 float OUT 750 gmoccapy.searchvel
69 bit IN FALSE gmoccapy.spc_ang_jog_vel.decrease
69 bit IN FALSE gmoccapy.spc_ang_jog_vel.increase
69 float IN 60 gmoccapy.spc_ang_jog_vel.scale
69 float OUT 6 gmoccapy.spc_ang_jog_vel.scaled-value
69 float OUT 360 gmoccapy.spc_ang_jog_vel.value
69 bit IN FALSE gmoccapy.spc_feed.decrease
69 bit IN FALSE gmoccapy.spc_feed.increase
69 float IN 60 gmoccapy.spc_feed.scale
69 float OUT 1.666667 gmoccapy.spc_feed.scaled-value
69 float OUT 100 gmoccapy.spc_feed.value
69 bit IN FALSE gmoccapy.spc_lin_jog_vel.decrease
69 bit IN FALSE gmoccapy.spc_lin_jog_vel.increase
69 float IN 60 gmoccapy.spc_lin_jog_vel.scale
69 float OUT 300 gmoccapy.spc_lin_jog_vel.scaled-value
69 float OUT 18000 gmoccapy.spc_lin_jog_vel.value
69 bit IN FALSE gmoccapy.spc_rapid.decrease
69 bit IN FALSE gmoccapy.spc_rapid.increase
69 float IN 60 gmoccapy.spc_rapid.scale
69 float OUT 1.666667 gmoccapy.spc_rapid.scaled-value
69 float OUT 100 gmoccapy.spc_rapid.value
69 bit IN FALSE gmoccapy.spc_spindle.decrease
69 bit IN FALSE gmoccapy.spc_spindle.increase
69 float IN 60 gmoccapy.spc_spindle.scale
69 float OUT 1.666667 gmoccapy.spc_spindle.scaled-value
69 float OUT 100 gmoccapy.spc_spindle.value
69 bit IN FALSE gmoccapy.spindle.reset-spindle-override
69 bit IN FALSE gmoccapy.spindle.spindle-override.analog-enable
69 bit IN FALSE gmoccapy.spindle.spindle-override.count-enable
69 s32 IN 0 gmoccapy.spindle.spindle-override.counts
69 float IN 0 gmoccapy.spindle.spindle-override.direct-value
69 bit IN FALSE gmoccapy.spindle_at_speed_led <== spindle-on
69 float IN 0 gmoccapy.spindle_feedback_bar <== spindle-vel-cmd
69 float OUT 1 gmoccapy.tool-diameter
69 bit IN FALSE gmoccapy.toolchange-change
69 bit OUT FALSE gmoccapy.toolchange-changed
69 s32 IN 0 gmoccapy.toolchange-number
69 bit OUT TRUE gmoccapy.toolmeasurement
69 float IN 0 gmoccapy.tooloffset-x <== tooloffset-x
69 float IN 23.59505 gmoccapy.tooloffset-z <== tooloffset-z
69 bit IN FALSE gmoccapy.unlock-settings
69 bit IN FALSE gmoccapy.v-button.button-0
69 bit IN FALSE gmoccapy.v-button.button-1
69 bit IN FALSE gmoccapy.v-button.button-2
69 bit IN FALSE gmoccapy.v-button.button-3
69 bit IN FALSE gmoccapy.v-button.button-4
69 bit IN FALSE gmoccapy.v-button.button-5
69 bit IN FALSE gmoccapy.v-button.button-6
78 bit OUT FALSE gvcp-panel.Tool_T0
78 bit OUT FALSE gvcp-panel.Tool_T1
78 bit OUT FALSE gvcp-panel.Tool_T10
78 bit OUT FALSE gvcp-panel.Tool_T11
78 bit OUT FALSE gvcp-panel.Tool_T12
78 bit OUT FALSE gvcp-panel.Tool_T2
78 bit OUT FALSE gvcp-panel.Tool_T3
78 bit OUT FALSE gvcp-panel.Tool_T4
78 bit OUT FALSE gvcp-panel.Tool_T5
78 bit OUT FALSE gvcp-panel.Tool_T6
78 bit OUT FALSE gvcp-panel.Tool_T7
78 bit OUT FALSE gvcp-panel.Tool_T8
78 bit OUT FALSE gvcp-panel.Tool_T9
78 bit OUT FALSE gvcp-panel.X_26_Y_20
78 bit OUT FALSE gvcp-panel.X_max_Y_max
78 bit OUT FALSE gvcp-panel.X_max_Y_mid
78 bit OUT FALSE gvcp-panel.X_max_Y_min
78 bit OUT FALSE gvcp-panel.X_mid_Y_max
78 bit OUT FALSE gvcp-panel.X_mid_Y_min
78 bit OUT FALSE gvcp-panel.X_min_Y_max
78 bit OUT FALSE gvcp-panel.X_min_Y_mid
78 bit OUT FALSE gvcp-panel.X_min_Y_min
78 float IN 0 gvcp-panel.a-output <== a-vel-cmd
78 bit IN TRUE gvcp-panel.brzdaZ-led <== z-enable
78 bit IN FALSE gvcp-panel.dorazy-dolu-led <== dorazy-dolu
78 bit IN FALSE gvcp-panel.dorazy-nahoru-led <== dorazy-nahoru
78 bit OUT FALSE gvcp-panel.dorazy_dolu
78 bit OUT FALSE gvcp-panel.dorazy_nahoru
78 bit IN FALSE gvcp-panel.flood
78 bit OUT FALSE gvcp-panel.hal_checkbutton_nesjizdet
78 bit OUT TRUE gvcp-panel.hal_checkbutton_nesjizdet-not
78 float IN -0.1308147 gvcp-panel.korekce_X <== korekce-X
78 bit OUT FALSE gvcp-panel.manual_probe
78 bit IN FALSE gvcp-panel.mist-led <== coolant-mist
78 bit IN FALSE gvcp-panel.mlha-el-ventil-led <== coolant-mist
78 bit OUT FALSE gvcp-panel.nastroj_T1
78 bit IN FALSE gvcp-panel.nizky-tlak-led
78 bit OUT FALSE gvcp-panel.obrobek_probe
78 bit IN FALSE gvcp-panel.probe-in-led <== probe-in
78 bit IN FALSE gvcp-panel.probe-in-led7
78 bit IN FALSE gvcp-panel.probe-sonda-led
78 bit IN FALSE gvcp-panel.probing-led <== probing
78 bit IN FALSE gvcp-panel.probing-led1
78 bit IN TRUE gvcp-panel.sani-dole-led <== sani-je-nahore
78 bit IN FALSE gvcp-panel.sani-dolu-led <== sani-dolu
78 bit IN FALSE gvcp-panel.sani-nahore-led <== sani-nahore
78 bit IN FALSE gvcp-panel.sani-nahoru-led <== sani-nahoru
78 bit OUT FALSE gvcp-panel.sanidolu
78 bit OUT FALSE gvcp-panel.saninahoru
78 bit OUT FALSE gvcp-panel.stred_XY
78 bit OUT FALSE gvcp-panel.tlacitko-probe ==> probe-in
78 bit IN FALSE gvcp-panel.tool-lock-led <== nastroj-lock
78 bit IN FALSE gvcp-panel.tool-lock-led10
78 bit IN FALSE gvcp-panel.tool-lock-led12
78 bit IN FALSE gvcp-panel.tool-lock-led13
78 bit IN FALSE gvcp-panel.tool-lock-led16
78 bit IN FALSE gvcp-panel.tool-lock-led19
78 bit IN FALSE gvcp-panel.tool-lock-led21
78 bit IN FALSE gvcp-panel.tool-lock-led4
78 bit IN FALSE gvcp-panel.tool-lock-led6
78 bit IN FALSE gvcp-panel.tool-lock-led7
78 bit IN TRUE gvcp-panel.tool-lockg-led <== nastroj-locking
78 bit IN FALSE gvcp-panel.tool-ulock-led <== nastroj-unlock
78 bit IN FALSE gvcp-panel.tool-unlockg-led <== nastroj-unlocking
78 bit OUT FALSE gvcp-panel.toolsenzor
78 bit IN FALSE gvcp-panel.vreteno-run-led <== spindle-cw
78 bit IN FALSE gvcp-panel.vreteno-vzduchovani-led <== spindle-on
78 bit IN FALSE gvcp-panel.vyveva-led
78 float IN -0.001013298 gvcp-panel.x-output <== x-vel-cmd
78 float IN 0 gvcp-panel.y1-output <== y1-vel-cmd
78 float IN -0.05983594 gvcp-panel.y1-y2 <== rozdil_y1_y2
78 float IN -0.0005781012 gvcp-panel.y2-output <== y2-vel-cmd
78 float IN 0 gvcp-panel.z-output <== z-vel-cmd
78 bit OUT FALSE gvcp-panel.zahrivani_vretene
10 bit IN FALSE halui.abort
10 float IN 0 halui.axis.a.analog
10 float IN 0 halui.axis.a.increment
10 bit IN FALSE halui.axis.a.increment-minus
10 bit IN FALSE halui.axis.a.increment-plus
10 bit OUT FALSE halui.axis.a.is-selected
10 bit IN FALSE halui.axis.a.minus
10 bit IN FALSE halui.axis.a.plus
10 float OUT 0.2205938 halui.axis.a.pos-commanded
10 float OUT 0.2205938 halui.axis.a.pos-feedback
10 float OUT 0.2205938 halui.axis.a.pos-relative
10 bit IN FALSE halui.axis.a.select
10 float IN 0 halui.axis.b.analog
10 float IN 0 halui.axis.b.increment
10 bit IN FALSE halui.axis.b.increment-minus
10 bit IN FALSE halui.axis.b.increment-plus
10 bit IN FALSE halui.axis.b.minus
10 bit IN FALSE halui.axis.b.plus
10 bit IN FALSE halui.axis.b.select
10 float IN 0 halui.axis.c.analog
10 float IN 0 halui.axis.c.increment
10 bit IN FALSE halui.axis.c.increment-minus
10 bit IN FALSE halui.axis.c.increment-plus
10 bit IN FALSE halui.axis.c.minus
10 bit IN FALSE halui.axis.c.plus
10 bit IN FALSE halui.axis.c.select
10 float IN 0.2 halui.axis.jog-deadband
10 float IN 0 halui.axis.jog-speed
10 u32 OUT 0x00000000 halui.axis.selected
10 float IN 0 halui.axis.selected.increment
10 bit IN FALSE halui.axis.selected.increment-minus
10 bit IN FALSE halui.axis.selected.increment-plus
10 bit IN FALSE halui.axis.selected.minus
10 bit IN FALSE halui.axis.selected.plus
10 float IN 0 halui.axis.u.analog
10 float IN 0 halui.axis.u.increment
10 bit IN FALSE halui.axis.u.increment-minus
10 bit IN FALSE halui.axis.u.increment-plus
10 bit IN FALSE halui.axis.u.minus
10 bit IN FALSE halui.axis.u.plus
10 bit IN FALSE halui.axis.u.select
10 float IN 0 halui.axis.v.analog
10 float IN 0 halui.axis.v.increment
10 bit IN FALSE halui.axis.v.increment-minus
10 bit IN FALSE halui.axis.v.increment-plus
10 bit IN FALSE halui.axis.v.minus
10 bit IN FALSE halui.axis.v.plus
10 bit IN FALSE halui.axis.v.select
10 float IN 0 halui.axis.w.analog
10 float IN 0 halui.axis.w.increment
10 bit IN FALSE halui.axis.w.increment-minus
10 bit IN FALSE halui.axis.w.increment-plus
10 bit IN FALSE halui.axis.w.minus
10 bit IN FALSE halui.axis.w.plus
10 bit IN FALSE halui.axis.w.select
10 float IN 0 halui.axis.x.analog
10 float IN 0 halui.axis.x.increment
10 bit IN FALSE halui.axis.x.increment-minus
10 bit IN FALSE halui.axis.x.increment-plus
10 bit OUT TRUE halui.axis.x.is-selected
10 bit IN FALSE halui.axis.x.minus
10 bit IN FALSE halui.axis.x.plus
10 float OUT 367.7317 halui.axis.x.pos-commanded
10 float OUT 367.7319 halui.axis.x.pos-feedback
10 float OUT 367.7319 halui.axis.x.pos-relative
10 bit IN FALSE halui.axis.x.select
10 float IN 0 halui.axis.y.analog
10 float IN 0 halui.axis.y.increment
10 bit IN FALSE halui.axis.y.increment-minus
10 bit IN FALSE halui.axis.y.increment-plus
10 bit OUT FALSE halui.axis.y.is-selected
10 bit IN FALSE halui.axis.y.minus
10 bit IN FALSE halui.axis.y.plus
10 float OUT 802.9263 halui.axis.y.pos-commanded
10 float OUT 802.9263 halui.axis.y.pos-feedback
10 float OUT 802.9263 halui.axis.y.pos-relative
10 bit IN FALSE halui.axis.y.select
10 float IN 0 halui.axis.z.analog
10 float IN 0 halui.axis.z.increment
10 bit IN FALSE halui.axis.z.increment-minus
10 bit IN FALSE halui.axis.z.increment-plus
10 bit OUT FALSE halui.axis.z.is-selected
10 bit IN FALSE halui.axis.z.minus
10 bit IN FALSE halui.axis.z.plus
10 float OUT 208.1626 halui.axis.z.pos-commanded
10 float OUT 208.1626 halui.axis.z.pos-feedback
10 float OUT 184.5676 halui.axis.z.pos-relative
10 bit IN FALSE halui.axis.z.select
10 bit IN FALSE halui.estop.activate
10 bit OUT FALSE halui.estop.is-activated
10 bit IN FALSE halui.estop.reset
10 bit IN TRUE halui.feed-override.count-enable
10 s32 IN 0 halui.feed-override.counts
10 bit IN FALSE halui.feed-override.decrease
10 bit IN FALSE halui.feed-override.direct-value
10 bit IN FALSE halui.feed-override.increase
10 float IN 0.1 halui.feed-override.scale
10 float OUT 1 halui.feed-override.value
10 bit OUT FALSE halui.flood.is-on
10 bit IN FALSE halui.flood.off
10 bit IN FALSE halui.flood.on
10 bit IN FALSE halui.home-all
10 float IN 0 halui.joint.0.analog
10 bit OUT FALSE halui.joint.0.has-fault
10 bit IN FALSE halui.joint.0.home
10 float IN 0 halui.joint.0.increment
10 bit IN FALSE halui.joint.0.increment-minus
10 bit IN FALSE halui.joint.0.increment-plus
10 bit OUT TRUE halui.joint.0.is-homed
10 bit OUT TRUE halui.joint.0.is-selected
10 bit IN FALSE halui.joint.0.minus
10 bit OUT FALSE halui.joint.0.on-hard-max-limit
10 bit OUT FALSE halui.joint.0.on-hard-min-limit
10 bit OUT FALSE halui.joint.0.on-soft-max-limit
10 bit OUT FALSE halui.joint.0.on-soft-min-limit
10 bit OUT FALSE halui.joint.0.override-limits
10 bit IN FALSE halui.joint.0.plus
10 bit IN FALSE halui.joint.0.select
10 bit IN FALSE halui.joint.0.unhome
10 float IN 0 halui.joint.1.analog
10 bit OUT FALSE halui.joint.1.has-fault
10 bit IN FALSE halui.joint.1.home
10 float IN 0 halui.joint.1.increment
10 bit IN FALSE halui.joint.1.increment-minus
10 bit IN FALSE halui.joint.1.increment-plus
10 bit OUT TRUE halui.joint.1.is-homed
10 bit OUT FALSE halui.joint.1.is-selected
10 bit IN FALSE halui.joint.1.minus
10 bit OUT FALSE halui.joint.1.on-hard-max-limit
10 bit OUT FALSE halui.joint.1.on-hard-min-limit
10 bit OUT FALSE halui.joint.1.on-soft-max-limit
10 bit OUT FALSE halui.joint.1.on-soft-min-limit
10 bit OUT FALSE halui.joint.1.override-limits
10 bit IN FALSE halui.joint.1.plus
10 bit IN FALSE halui.joint.1.select
10 bit IN FALSE halui.joint.1.unhome
10 float IN 0 halui.joint.2.analog
10 bit OUT FALSE halui.joint.2.has-fault
10 bit IN FALSE halui.joint.2.home
10 float IN 0 halui.joint.2.increment
10 bit IN FALSE halui.joint.2.increment-minus
10 bit IN FALSE halui.joint.2.increment-plus
10 bit OUT TRUE halui.joint.2.is-homed
10 bit OUT FALSE halui.joint.2.is-selected
10 bit IN FALSE halui.joint.2.minus
10 bit OUT FALSE halui.joint.2.on-hard-max-limit
10 bit OUT FALSE halui.joint.2.on-hard-min-limit
10 bit OUT FALSE halui.joint.2.on-soft-max-limit
10 bit OUT FALSE halui.joint.2.on-soft-min-limit
10 bit OUT FALSE halui.joint.2.override-limits
10 bit IN FALSE halui.joint.2.plus
10 bit IN FALSE halui.joint.2.select
10 bit IN FALSE halui.joint.2.unhome
10 float IN 0 halui.joint.3.analog
10 bit OUT FALSE halui.joint.3.has-fault
10 bit IN FALSE halui.joint.3.home
10 float IN 0 halui.joint.3.increment
10 bit IN FALSE halui.joint.3.increment-minus
10 bit IN FALSE halui.joint.3.increment-plus
10 bit OUT TRUE halui.joint.3.is-homed
10 bit OUT FALSE halui.joint.3.is-selected
10 bit IN FALSE halui.joint.3.minus
10 bit OUT FALSE halui.joint.3.on-hard-max-limit
10 bit OUT FALSE halui.joint.3.on-hard-min-limit
10 bit OUT FALSE halui.joint.3.on-soft-max-limit
10 bit OUT FALSE halui.joint.3.on-soft-min-limit
10 bit OUT FALSE halui.joint.3.override-limits
10 bit IN FALSE halui.joint.3.plus
10 bit IN FALSE halui.joint.3.select
10 bit IN FALSE halui.joint.3.unhome
10 float IN 0 halui.joint.4.analog
10 bit OUT FALSE halui.joint.4.has-fault
10 bit IN FALSE halui.joint.4.home
10 float IN 0 halui.joint.4.increment
10 bit IN FALSE halui.joint.4.increment-minus
10 bit IN FALSE halui.joint.4.increment-plus
10 bit OUT TRUE halui.joint.4.is-homed
10 bit OUT FALSE halui.joint.4.is-selected
10 bit IN FALSE halui.joint.4.minus
10 bit OUT FALSE halui.joint.4.on-hard-max-limit
10 bit OUT FALSE halui.joint.4.on-hard-min-limit
10 bit OUT FALSE halui.joint.4.on-soft-max-limit
10 bit OUT FALSE halui.joint.4.on-soft-min-limit
10 bit OUT FALSE halui.joint.4.override-limits
10 bit IN FALSE halui.joint.4.plus
10 bit IN FALSE halui.joint.4.select
10 bit IN FALSE halui.joint.4.unhome
10 float IN 0.2 halui.joint.jog-deadband
10 float IN 0 halui.joint.jog-speed
10 u32 OUT 0x00000000 halui.joint.selected
10 bit OUT FALSE halui.joint.selected.has-fault
10 bit IN FALSE halui.joint.selected.home
10 float IN 0 halui.joint.selected.increment
10 bit IN FALSE halui.joint.selected.increment-minus
10 bit IN FALSE halui.joint.selected.increment-plus
10 bit OUT TRUE halui.joint.selected.is-homed
10 bit IN FALSE halui.joint.selected.minus
10 bit OUT FALSE halui.joint.selected.on-hard-max-limit
10 bit OUT FALSE halui.joint.selected.on-hard-min-limit
10 bit OUT FALSE halui.joint.selected.on-soft-max-limit
10 bit OUT FALSE halui.joint.selected.on-soft-min-limit
10 bit OUT FALSE halui.joint.selected.override-limits
10 bit IN FALSE halui.joint.selected.plus
10 bit IN FALSE halui.joint.selected.unhome
10 bit OUT TRUE halui.lube.is-on
10 bit IN FALSE halui.lube.off
10 bit IN FALSE halui.lube.on
10 bit OUT TRUE halui.machine.is-on
10 bit IN FALSE halui.machine.off
10 bit IN FALSE halui.machine.on
10 float OUT 1 halui.machine.units-per-mm
10 bit IN TRUE halui.max-velocity.count-enable
10 s32 IN 0 halui.max-velocity.counts
10 bit IN FALSE halui.max-velocity.decrease
10 bit IN FALSE halui.max-velocity.direct-value
10 bit IN FALSE halui.max-velocity.increase
10 float IN 0 halui.max-velocity.scale
10 float OUT 300 halui.max-velocity.value
10 bit OUT FALSE halui.mist.is-on
10 bit IN FALSE halui.mist.off
10 bit IN FALSE halui.mist.on
10 bit IN FALSE halui.mode.auto
10 bit OUT FALSE halui.mode.is-auto
10 bit OUT FALSE halui.mode.is-joint
10 bit OUT TRUE halui.mode.is-manual
10 bit OUT FALSE halui.mode.is-mdi
10 bit OUT TRUE halui.mode.is-teleop
10 bit IN FALSE halui.mode.joint
10 bit IN FALSE halui.mode.manual <== manul-mode-out
10 bit IN FALSE halui.mode.mdi
10 bit IN FALSE halui.mode.teleop
10 bit OUT FALSE halui.program.block-delete.is-on
10 bit IN FALSE halui.program.block-delete.off
10 bit IN FALSE halui.program.block-delete.on
10 bit OUT TRUE halui.program.is-idle
10 bit OUT FALSE halui.program.is-paused
10 bit OUT FALSE halui.program.is-running
10 bit OUT TRUE halui.program.optional-stop.is-on
10 bit IN FALSE halui.program.optional-stop.off
10 bit IN FALSE halui.program.optional-stop.on
10 bit IN FALSE halui.program.pause
10 bit IN FALSE halui.program.resume
10 bit IN FALSE halui.program.run
10 bit IN FALSE halui.program.step
10 bit IN FALSE halui.program.stop
10 bit IN TRUE halui.rapid-override.count-enable
10 s32 IN 0 halui.rapid-override.counts
10 bit IN FALSE halui.rapid-override.decrease
10 bit IN FALSE halui.rapid-override.direct-value
10 bit IN FALSE halui.rapid-override.increase
10 float IN 0.1 halui.rapid-override.scale
10 float OUT 1 halui.rapid-override.value
10 bit OUT TRUE halui.spindle.0.brake-is-on
10 bit IN FALSE halui.spindle.0.brake-off
10 bit IN FALSE halui.spindle.0.brake-on
10 bit IN FALSE halui.spindle.0.decrease
10 bit IN FALSE halui.spindle.0.forward
10 bit IN FALSE halui.spindle.0.increase
10 bit OUT FALSE halui.spindle.0.is-on
10 bit IN TRUE halui.spindle.0.override.count-enable
10 s32 IN 0 halui.spindle.0.override.counts
10 bit IN FALSE halui.spindle.0.override.decrease
10 bit IN FALSE halui.spindle.0.override.direct-value
10 bit IN FALSE halui.spindle.0.override.increase
10 float IN 0.1 halui.spindle.0.override.scale
10 float OUT 1 halui.spindle.0.override.value
10 bit IN FALSE halui.spindle.0.reverse
10 bit OUT FALSE halui.spindle.0.runs-backward
10 bit OUT FALSE halui.spindle.0.runs-forward
10 bit IN FALSE halui.spindle.0.start
10 bit IN FALSE halui.spindle.0.stop
10 float OUT 1 halui.tool.diameter
10 float OUT 0 halui.tool.length_offset.a
10 float OUT 0 halui.tool.length_offset.b
10 float OUT 0 halui.tool.length_offset.c
10 float OUT 0 halui.tool.length_offset.u
10 float OUT 0 halui.tool.length_offset.v
10 float OUT 0 halui.tool.length_offset.w
10 float OUT 0 halui.tool.length_offset.x
10 float OUT 0 halui.tool.length_offset.y
10 float OUT 23.59505 halui.tool.length_offset.z
10 u32 OUT 0x00000001 halui.tool.number
71 float IN 0 ini.0.backlash
71 float IN 10.05 ini.0.ferror
71 float IN 0 ini.0.home
71 float IN 0 ini.0.home_offset
71 s32 IN 0 ini.0.home_sequence
71 float IN 750 ini.0.max_acceleration
71 float IN 1483 ini.0.max_limit
71 float IN 300 ini.0.max_velocity
71 float IN 10.05 ini.0.min_ferror
71 float IN -300 ini.0.min_limit
71 float IN 0 ini.1.backlash
71 float IN 0.05 ini.1.ferror
71 float IN 0 ini.1.home
71 float IN 0 ini.1.home_offset
71 s32 IN 0 ini.1.home_sequence
71 float IN 500 ini.1.max_acceleration
71 float IN 2545 ini.1.max_limit
71 float IN 200 ini.1.max_velocity
71 float IN 0.2 ini.1.min_ferror
71 float IN -35 ini.1.min_limit
71 float IN 0 ini.2.backlash
71 float IN 0.05 ini.2.ferror
71 float IN 0 ini.2.home
71 float IN 0 ini.2.home_offset
71 s32 IN 0 ini.2.home_sequence
71 float IN 500 ini.2.max_acceleration
71 float IN 2545 ini.2.max_limit
71 float IN 200 ini.2.max_velocity
71 float IN 0.2 ini.2.min_ferror
71 float IN -35 ini.2.min_limit
71 float IN 0 ini.3.backlash
71 float IN 0.02 ini.3.ferror
71 float IN 0 ini.3.home
71 float IN 0 ini.3.home_offset
71 s32 IN 0 ini.3.home_sequence
71 float IN 250 ini.3.max_acceleration
71 float IN 271 ini.3.max_limit
71 float IN 30 ini.3.max_velocity
71 float IN 0.02 ini.3.min_ferror
71 float IN 0 ini.3.min_limit
71 float IN 0 ini.4.backlash
71 float IN 10 ini.4.ferror
71 float IN 0 ini.4.home
71 float IN 0 ini.4.home_offset
71 s32 IN 0 ini.4.home_sequence
71 float IN 450 ini.4.max_acceleration
71 float IN 1e+99 ini.4.max_limit
71 float IN 100 ini.4.max_velocity
71 float IN 5 ini.4.min_ferror
71 float IN -1e+99 ini.4.min_limit
71 float IN 450 ini.a.max_acceleration
71 float IN 36000 ini.a.max_limit
71 float IN 100 ini.a.max_velocity
71 float IN -36000 ini.a.min_limit
71 float IN 0 ini.b.max_acceleration
71 float IN 0 ini.b.max_limit
71 float IN 0 ini.b.max_velocity
71 float IN 0 ini.b.min_limit
71 float IN 0 ini.c.max_acceleration
71 float IN 0 ini.c.max_limit
71 float IN 0 ini.c.max_velocity
71 float IN 0 ini.c.min_limit
71 bit IN TRUE ini.traj_arc_blend_enable
71 bit IN FALSE ini.traj_arc_blend_fallback_enable
71 float IN 4 ini.traj_arc_blend_gap_cycles
71 s32 IN 50 ini.traj_arc_blend_optimization_depth
71 float IN 100 ini.traj_arc_blend_ramp_freq
71 float IN 0.1 ini.traj_arc_blend_tangent_kink_ratio
71 float IN 1e+99 ini.traj_default_acceleration
71 float IN 300 ini.traj_default_velocity
71 float IN 1e+99 ini.traj_max_acceleration
71 float IN 300 ini.traj_max_velocity
71 float IN 0 ini.u.max_acceleration
71 float IN 0 ini.u.max_limit
71 float IN 0 ini.u.max_velocity
71 float IN 0 ini.u.min_limit
71 float IN 0 ini.v.max_acceleration
71 float IN 0 ini.v.max_limit
71 float IN 0 ini.v.max_velocity
71 float IN 0 ini.v.min_limit
71 float IN 0 ini.w.max_acceleration
71 float IN 0 ini.w.max_limit
71 float IN 0 ini.w.max_velocity
71 float IN 0 ini.w.min_limit
71 float IN 750 ini.x.max_acceleration
71 float IN 1483 ini.x.max_limit
71 float IN 300 ini.x.max_velocity
71 float IN -300 ini.x.min_limit
71 float IN 500 ini.y.max_acceleration
71 float IN 2545 ini.y.max_limit
71 float IN 200 ini.y.max_velocity
71 float IN -35 ini.y.min_limit
71 float IN 250 ini.z.max_acceleration
71 float IN 271 ini.z.max_limit
71 float IN 30 ini.z.max_velocity
71 float IN 0 ini.z.min_limit
4 bit OUT FALSE iocontrol.0.coolant-flood
4 bit OUT FALSE iocontrol.0.coolant-mist ==> coolant-mist
4 bit IN TRUE iocontrol.0.emc-enable-in
4 bit OUT TRUE iocontrol.0.lube
4 bit IN FALSE iocontrol.0.lube_level
4 bit OUT FALSE iocontrol.0.tool-change
4 bit IN FALSE iocontrol.0.tool-changed
4 s32 OUT 1 iocontrol.0.tool-number
4 s32 OUT 0 iocontrol.0.tool-prep-number ==> tool-prep-number
4 s32 OUT 0 iocontrol.0.tool-prep-pocket
4 bit OUT FALSE iocontrol.0.tool-prepare ==> tool-prep-loop
4 bit IN FALSE iocontrol.0.tool-prepared <== tool-prep-loop
4 bit OUT FALSE iocontrol.0.user-enable-out
4 bit OUT FALSE iocontrol.0.user-request-enable
19 float OUT 0 joint.0.acc-cmd
19 bit OUT TRUE joint.0.active
19 bit OUT TRUE joint.0.amp-enable-out ==> x-enable
19 bit IN FALSE joint.0.amp-fault-in <== x-amp-fault
19 float OUT -0.1308147 joint.0.backlash-corr ==> korekce-X
19 float OUT -0.1308147 joint.0.backlash-filt
19 float OUT 0 joint.0.backlash-vel
19 float OUT 367.7317 joint.0.coarse-pos-cmd
19 bit OUT FALSE joint.0.error
19 float OUT -0.0001506649 joint.0.f-error
19 float OUT 10.05 joint.0.f-error-lim
19 bit OUT FALSE joint.0.f-errored
19 bit OUT FALSE joint.0.faulted
19 float OUT -185.6183 joint.0.free-pos-cmd
19 bit OUT FALSE joint.0.free-tp-enable
19 float OUT 0 joint.0.free-vel-lim
19 s32 OUT 0 joint.0.home-state
19 bit IN FALSE joint.0.home-sw-in <== x-neg-lim-in
19 bit OUT TRUE joint.0.homed ==> x-homed
19 bit OUT FALSE joint.0.homing ==> x-homing
19 bit OUT TRUE joint.0.in-position
19 bit I/O FALSE joint.0.index-enable
19 float IN 1 joint.0.jog-accel-fraction
19 s32 IN 0 joint.0.jog-counts
19 bit IN FALSE joint.0.jog-enable
19 float IN 0 joint.0.jog-scale
19 bit IN FALSE joint.0.jog-vel-mode
19 bit OUT FALSE joint.0.kb-jog-active
19 float OUT 0 joint.0.motor-offset
19 float OUT 367.6009 joint.0.motor-pos-cmd ==> x-pos-cmd
19 float IN 367.6011 joint.0.motor-pos-fb <== x-pos-fb
19 bit OUT FALSE joint.0.neg-hard-limit
19 bit IN FALSE joint.0.neg-lim-sw-in <== x-neg-lim-in
19 float OUT 367.7317 joint.0.pos-cmd
19 float OUT 367.7319 joint.0.pos-fb ==> x-pos-joint
19 bit OUT FALSE joint.0.pos-hard-limit
19 bit IN FALSE joint.0.pos-lim-sw-in <== x-pos-lim-in
19 float OUT 0 joint.0.vel-cmd
19 bit OUT FALSE joint.0.wheel-jog-active
19 float OUT 0 joint.1.acc-cmd
19 bit OUT TRUE joint.1.active
19 bit OUT TRUE joint.1.amp-enable-out ==> y1-enable
19 bit IN FALSE joint.1.amp-fault-in <== y1-amp-fault
19 float OUT -0.035 joint.1.backlash-corr
19 float OUT -0.035 joint.1.backlash-filt
19 float OUT 0 joint.1.backlash-vel
19 float OUT 802.9263 joint.1.coarse-pos-cmd
19 bit OUT FALSE joint.1.error
19 float OUT 3.51561e-05 joint.1.f-error
19 float OUT 0.2 joint.1.f-error-lim
19 bit OUT FALSE joint.1.f-errored
19 bit OUT FALSE joint.1.faulted
19 float OUT 800.4058 joint.1.free-pos-cmd
19 bit OUT FALSE joint.1.free-tp-enable
19 float OUT 0 joint.1.free-vel-lim
19 s32 OUT 0 joint.1.home-state
19 bit IN FALSE joint.1.home-sw-in <== y1-pos-lim-in
19 bit OUT TRUE joint.1.homed ==> y1-homed
19 bit OUT FALSE joint.1.homing ==> y1-homing
19 bit OUT TRUE joint.1.in-position
19 bit I/O FALSE joint.1.index-enable
19 float IN 1 joint.1.jog-accel-fraction
19 s32 IN 0 joint.1.jog-counts
19 bit IN FALSE joint.1.jog-enable
19 float IN 0 joint.1.jog-scale
19 bit IN FALSE joint.1.jog-vel-mode
19 bit OUT FALSE joint.1.kb-jog-active
19 float OUT 0 joint.1.motor-offset
19 float OUT 802.8913 joint.1.motor-pos-cmd ==> y1-pos-cmd
19 float IN 802.8912 joint.1.motor-pos-fb <== y1-pos-fb
19 bit OUT FALSE joint.1.neg-hard-limit
19 bit IN FALSE joint.1.neg-lim-sw-in <== y1-neg-lim-in
19 float OUT 802.9263 joint.1.pos-cmd
19 float OUT 802.9262 joint.1.pos-fb ==> y1-pos-joint
19 bit OUT FALSE joint.1.pos-hard-limit
19 bit IN FALSE joint.1.pos-lim-sw-in <== y1-pos-lim-in
19 float OUT 0 joint.1.vel-cmd
19 bit OUT FALSE joint.1.wheel-jog-active
19 float OUT 0 joint.2.acc-cmd
19 bit OUT TRUE joint.2.active
19 bit OUT TRUE joint.2.amp-enable-out ==> y2-enable
19 bit IN FALSE joint.2.amp-fault-in <== y2-amp-fault
19 float OUT -0.095 joint.2.backlash-corr
19 float OUT -0.095 joint.2.backlash-filt
19 float OUT 0 joint.2.backlash-vel
19 float OUT 802.9263 joint.2.coarse-pos-cmd
19 bit OUT FALSE joint.2.error
19 float OUT -7.031131e-05 joint.2.f-error
19 float OUT 0.2 joint.2.f-error-lim
19 bit OUT FALSE joint.2.f-errored
19 bit OUT FALSE joint.2.faulted
19 float OUT 800.4058 joint.2.free-pos-cmd
19 bit OUT FALSE joint.2.free-tp-enable
19 float OUT 0 joint.2.free-vel-lim
19 s32 OUT 0 joint.2.home-state
19 bit IN FALSE joint.2.home-sw-in <== y2-pos-lim-in
19 bit OUT TRUE joint.2.homed ==> y2-homed
19 bit OUT FALSE joint.2.homing ==> y2-homing
19 bit OUT TRUE joint.2.in-position
19 bit I/O FALSE joint.2.index-enable
19 float IN 1 joint.2.jog-accel-fraction
19 s32 IN 0 joint.2.jog-counts
19 bit IN FALSE joint.2.jog-enable
19 float IN 0 joint.2.jog-scale
19 bit IN FALSE joint.2.jog-vel-mode
19 bit OUT FALSE joint.2.kb-jog-active
19 float OUT 0 joint.2.motor-offset
19 float OUT 802.8313 joint.2.motor-pos-cmd ==> y2-pos-cmd
19 float IN 802.8313 joint.2.motor-pos-fb <== y2-pos-fb
19 bit OUT FALSE joint.2.neg-hard-limit
19 bit IN FALSE joint.2.neg-lim-sw-in <== y2-neg-lim-in
19 float OUT 802.9263 joint.2.pos-cmd
19 float OUT 802.9263 joint.2.pos-fb ==> y2-pos-joint
19 bit OUT FALSE joint.2.pos-hard-limit
19 bit IN FALSE joint.2.pos-lim-sw-in <== y2-pos-lim-in
19 float OUT 0 joint.2.vel-cmd
19 bit OUT FALSE joint.2.wheel-jog-active
19 float OUT 0 joint.3.acc-cmd
19 bit OUT TRUE joint.3.active
19 bit OUT TRUE joint.3.amp-enable-out ==> z-enable
19 bit IN FALSE joint.3.amp-fault-in <== z-amp-fault
19 float OUT 0 joint.3.backlash-corr
19 float OUT 0 joint.3.backlash-filt
19 float OUT 0 joint.3.backlash-vel
19 float OUT 208.1626 joint.3.coarse-pos-cmd
19 bit OUT FALSE joint.3.error
19 float OUT -3.125e-05 joint.3.f-error
19 float OUT 0.02 joint.3.f-error-lim
19 bit OUT FALSE joint.3.f-errored
19 bit OUT FALSE joint.3.faulted
19 float OUT 208.1626 joint.3.free-pos-cmd
19 bit OUT FALSE joint.3.free-tp-enable
19 float OUT 0 joint.3.free-vel-lim
19 s32 OUT 0 joint.3.home-state
19 bit IN FALSE joint.3.home-sw-in <== z-pos-lim-in
19 bit OUT TRUE joint.3.homed ==> z-homed
19 bit OUT FALSE joint.3.homing ==> z-homing
19 bit OUT TRUE joint.3.in-position
19 bit I/O FALSE joint.3.index-enable
19 float IN 1 joint.3.jog-accel-fraction
19 s32 IN 0 joint.3.jog-counts
19 bit IN FALSE joint.3.jog-enable
19 float IN 0 joint.3.jog-scale
19 bit IN FALSE joint.3.jog-vel-mode
19 bit OUT FALSE joint.3.kb-jog-active
19 float OUT 0 joint.3.motor-offset
19 float OUT 208.1626 joint.3.motor-pos-cmd ==> z-pos-cmd
19 float IN 208.1626 joint.3.motor-pos-fb <== z-pos-fb
19 bit OUT FALSE joint.3.neg-hard-limit
19 bit IN FALSE joint.3.neg-lim-sw-in <== z-neg-lim-in
19 float OUT 208.1626 joint.3.pos-cmd
19 float OUT 208.1626 joint.3.pos-fb ==> z-pos-joint
19 bit OUT FALSE joint.3.pos-hard-limit
19 bit IN FALSE joint.3.pos-lim-sw-in <== z-pos-lim-in
19 float OUT 0 joint.3.vel-cmd
19 bit OUT FALSE joint.3.wheel-jog-active
19 float OUT 0 joint.4.acc-cmd
19 bit OUT TRUE joint.4.active
19 bit OUT TRUE joint.4.amp-enable-out ==> a-enable
19 bit IN FALSE joint.4.amp-fault-in <== a-amp-fault
19 float OUT 0 joint.4.backlash-corr
19 float OUT 0 joint.4.backlash-filt
19 float OUT 0 joint.4.backlash-vel
19 float OUT 0.2205938 joint.4.coarse-pos-cmd
19 bit OUT FALSE joint.4.error
19 float OUT 0 joint.4.f-error
19 float OUT 5 joint.4.f-error-lim
19 bit OUT FALSE joint.4.f-errored
19 bit OUT FALSE joint.4.faulted
19 float OUT 0.2205938 joint.4.free-pos-cmd
19 bit OUT FALSE joint.4.free-tp-enable
19 float OUT 0 joint.4.free-vel-lim
19 s32 OUT 0 joint.4.home-state
19 bit IN FALSE joint.4.home-sw-in <== a-pos-lim-in
19 bit OUT TRUE joint.4.homed ==> a-homed
19 bit OUT FALSE joint.4.homing ==> a-homing
19 bit OUT TRUE joint.4.in-position
19 bit I/O FALSE joint.4.index-enable
19 float IN 1 joint.4.jog-accel-fraction
19 s32 IN 0 joint.4.jog-counts
19 bit IN FALSE joint.4.jog-enable
19 float IN 0 joint.4.jog-scale
19 bit IN FALSE joint.4.jog-vel-mode
19 bit OUT FALSE joint.4.kb-jog-active
19 float OUT 0 joint.4.motor-offset
19 float OUT 0.2205938 joint.4.motor-pos-cmd ==> a-pos-cmd
19 float IN 0.2205938 joint.4.motor-pos-fb <== a-pos-fb
19 bit OUT FALSE joint.4.neg-hard-limit
19 bit IN FALSE joint.4.neg-lim-sw-in <== a-neg-lim-in
19 float OUT 0.2205938 joint.4.pos-cmd
19 float OUT 0.2205938 joint.4.pos-fb ==> a-pos-joint
19 bit OUT FALSE joint.4.pos-hard-limit
19 bit IN FALSE joint.4.pos-lim-sw-in <== a-pos-lim-in
19 float OUT 0 joint.4.vel-cmd
19 bit OUT FALSE joint.4.wheel-jog-active
27 u32 I/O 0x00000000 lcec.0.A.enc-ext-hi
27 u32 I/O 0x0000009C lcec.0.A.enc-ext-lo
27 bit I/O FALSE lcec.0.A.enc-index-ena
27 bit OUT FALSE lcec.0.A.enc-on-home-neg
27 bit OUT TRUE lcec.0.A.enc-on-home-pos
27 float OUT 0 lcec.0.A.enc-pos
27 float OUT 0.2205938 lcec.0.A.enc-pos-abs
27 float OUT 0.2205938 lcec.0.A.enc-pos-enc ==> a-pos-fb
27 bit IN FALSE lcec.0.A.enc-pos-reset
27 s32 OUT 156 lcec.0.A.enc-raw
27 u32 OUT 0x00000000 lcec.0.A.enc-ref-hi
27 u32 OUT 0x0000009C lcec.0.A.enc-ref-lo
27 u32 I/O 0x00000000 lcec.0.A.extenc-ext-hi
27 u32 I/O 0x00000064 lcec.0.A.extenc-ext-lo
27 bit I/O FALSE lcec.0.A.extenc-index-ena
27 bit OUT FALSE lcec.0.A.extenc-on-home-neg
27 bit OUT TRUE lcec.0.A.extenc-on-home-pos
27 float OUT 0 lcec.0.A.extenc-pos
27 float OUT 100 lcec.0.A.extenc-pos-abs
27 float OUT 100 lcec.0.A.extenc-pos-enc
27 bit IN FALSE lcec.0.A.extenc-pos-reset
27 s32 OUT 100 lcec.0.A.extenc-raw
27 u32 OUT 0x00000000 lcec.0.A.extenc-ref-hi
27 u32 OUT 0x00000064 lcec.0.A.extenc-ref-lo
27 bit OUT TRUE lcec.0.A.slave-online
27 bit OUT TRUE lcec.0.A.slave-oper
27 bit OUT FALSE lcec.0.A.slave-state-init
27 bit OUT TRUE lcec.0.A.slave-state-op
27 bit OUT FALSE lcec.0.A.slave-state-preop
27 bit OUT FALSE lcec.0.A.slave-state-safeop
27 bit OUT FALSE lcec.0.A.srv-at-speed
27 bit IN TRUE lcec.0.A.srv-enable <== a-enable
27 bit IN TRUE lcec.0.A.srv-enable-volt
27 bit OUT FALSE lcec.0.A.srv-fault ==> a-amp-fault
27 bit IN FALSE lcec.0.A.srv-fault-reset
27 bit IN FALSE lcec.0.A.srv-halt
27 bit OUT FALSE lcec.0.A.srv-limit-active
27 bit OUT FALSE lcec.0.A.srv-on-disabled
27 bit OUT TRUE lcec.0.A.srv-oper-enabled
27 bit IN FALSE lcec.0.A.srv-quick-stop
27 bit OUT FALSE lcec.0.A.srv-quick-stoped
27 bit OUT TRUE lcec.0.A.srv-ready
27 bit OUT TRUE lcec.0.A.srv-remote
27 bit IN TRUE lcec.0.A.srv-switch-on <== a-enable
27 bit OUT TRUE lcec.0.A.srv-switched-on
27 float IN 0 lcec.0.A.srv-vel-cmd <== a-vel-cmd
27 float OUT 0 lcec.0.A.srv-vel-fb
27 float OUT 0 lcec.0.A.srv-vel-fb-rpm
27 float OUT 0 lcec.0.A.srv-vel-fb-rpm-abs
27 float OUT 0 lcec.0.A.srv-vel-rpm
27 bit OUT TRUE lcec.0.A.srv-volt-enabled
27 bit OUT FALSE lcec.0.A.srv-warning
27 bit OUT FALSE lcec.0.A.srv-zero-speed
27 float I/O 0 lcec.0.AIN.ain-0-bias
27 bit OUT FALSE lcec.0.AIN.ain-0-error
27 bit OUT FALSE lcec.0.AIN.ain-0-overrange
27 s32 OUT 0 lcec.0.AIN.ain-0-raw
27 float I/O 1 lcec.0.AIN.ain-0-scale
27 bit OUT FALSE lcec.0.AIN.ain-0-underrange
27 float OUT 0 lcec.0.AIN.ain-0-val
27 float I/O 0 lcec.0.AIN.ain-1-bias
27 bit OUT FALSE lcec.0.AIN.ain-1-error
27 bit OUT FALSE lcec.0.AIN.ain-1-overrange
27 s32 OUT 5 lcec.0.AIN.ain-1-raw
27 float I/O 1 lcec.0.AIN.ain-1-scale
27 bit OUT FALSE lcec.0.AIN.ain-1-underrange
27 float OUT 0.0001525925 lcec.0.AIN.ain-1-val
27 float I/O 0 lcec.0.AIN.ain-2-bias
27 bit OUT FALSE lcec.0.AIN.ain-2-error
27 bit OUT FALSE lcec.0.AIN.ain-2-overrange
27 s32 OUT 2 lcec.0.AIN.ain-2-raw
27 float I/O 1 lcec.0.AIN.ain-2-scale
27 bit OUT FALSE lcec.0.AIN.ain-2-underrange
27 float OUT 6.103702e-05 lcec.0.AIN.ain-2-val
27 float I/O 0 lcec.0.AIN.ain-3-bias
27 bit OUT FALSE lcec.0.AIN.ain-3-error
27 bit OUT FALSE lcec.0.AIN.ain-3-overrange
27 s32 OUT 9 lcec.0.AIN.ain-3-raw
27 float I/O 1 lcec.0.AIN.ain-3-scale
27 bit OUT FALSE lcec.0.AIN.ain-3-underrange
27 float OUT 0.0002746666 lcec.0.AIN.ain-3-val
27 bit OUT TRUE lcec.0.AIN.slave-online
27 bit OUT TRUE lcec.0.AIN.slave-oper
27 bit OUT FALSE lcec.0.AIN.slave-state-init
27 bit OUT TRUE lcec.0.AIN.slave-state-op
27 bit OUT FALSE lcec.0.AIN.slave-state-preop
27 bit OUT FALSE lcec.0.AIN.slave-state-safeop
27 bit IN FALSE lcec.0.AOUT.aout-0-absmode
27 float OUT 0 lcec.0.AOUT.aout-0-curr-dc
27 bit IN FALSE lcec.0.AOUT.aout-0-enable <== spindle-on
27 float I/O 1 lcec.0.AOUT.aout-0-max-dc
27 float I/O -1 lcec.0.AOUT.aout-0-min-dc
27 bit OUT FALSE lcec.0.AOUT.aout-0-neg
27 float I/O 0 lcec.0.AOUT.aout-0-offset
27 bit OUT FALSE lcec.0.AOUT.aout-0-pos
27 s32 OUT 0 lcec.0.AOUT.aout-0-raw
27 float I/O 24000 lcec.0.AOUT.aout-0-scale
27 float IN 0 lcec.0.AOUT.aout-0-value <== spindle-vel-cmd
27 bit IN FALSE lcec.0.AOUT.aout-1-absmode
27 float OUT 0 lcec.0.AOUT.aout-1-curr-dc
27 bit IN FALSE lcec.0.AOUT.aout-1-enable
27 float I/O 1 lcec.0.AOUT.aout-1-max-dc
27 float I/O -1 lcec.0.AOUT.aout-1-min-dc
27 bit OUT FALSE lcec.0.AOUT.aout-1-neg
27 float I/O 0 lcec.0.AOUT.aout-1-offset
27 bit OUT FALSE lcec.0.AOUT.aout-1-pos
27 s32 OUT 0 lcec.0.AOUT.aout-1-raw
27 float I/O 1 lcec.0.AOUT.aout-1-scale
27 float IN 0 lcec.0.AOUT.aout-1-value
27 bit IN FALSE lcec.0.AOUT.aout-2-absmode
27 float OUT 0 lcec.0.AOUT.aout-2-curr-dc
27 bit IN FALSE lcec.0.AOUT.aout-2-enable
27 float I/O 1 lcec.0.AOUT.aout-2-max-dc
27 float I/O -1 lcec.0.AOUT.aout-2-min-dc
27 bit OUT FALSE lcec.0.AOUT.aout-2-neg
27 float I/O 0 lcec.0.AOUT.aout-2-offset
27 bit OUT FALSE lcec.0.AOUT.aout-2-pos
27 s32 OUT 0 lcec.0.AOUT.aout-2-raw
27 float I/O 1 lcec.0.AOUT.aout-2-scale
27 float IN 0 lcec.0.AOUT.aout-2-value
27 bit IN FALSE lcec.0.AOUT.aout-3-absmode
27 float OUT 0 lcec.0.AOUT.aout-3-curr-dc
27 bit IN FALSE lcec.0.AOUT.aout-3-enable
27 float I/O 1 lcec.0.AOUT.aout-3-max-dc
27 float I/O -1 lcec.0.AOUT.aout-3-min-dc
27 bit OUT FALSE lcec.0.AOUT.aout-3-neg
27 float I/O 0 lcec.0.AOUT.aout-3-offset
27 bit OUT FALSE lcec.0.AOUT.aout-3-pos
27 s32 OUT 0 lcec.0.AOUT.aout-3-raw
27 float I/O 1 lcec.0.AOUT.aout-3-scale
27 float IN 0 lcec.0.AOUT.aout-3-value
27 bit OUT TRUE lcec.0.AOUT.slave-online
27 bit OUT TRUE lcec.0.AOUT.slave-oper
27 bit OUT FALSE lcec.0.AOUT.slave-state-init
27 bit OUT TRUE lcec.0.AOUT.slave-state-op
27 bit OUT FALSE lcec.0.AOUT.slave-state-preop
27 bit OUT FALSE lcec.0.AOUT.slave-state-safeop
27 bit OUT FALSE lcec.0.DIN1.din-0
27 bit OUT TRUE lcec.0.DIN1.din-0-not
27 bit OUT TRUE lcec.0.DIN1.din-1 ==> nastroj-locking
27 bit OUT FALSE lcec.0.DIN1.din-1-not
27 bit OUT FALSE lcec.0.DIN1.din-10
27 bit OUT TRUE lcec.0.DIN1.din-10-not
27 bit OUT FALSE lcec.0.DIN1.din-11
27 bit OUT TRUE lcec.0.DIN1.din-11-not
27 bit OUT FALSE lcec.0.DIN1.din-12
27 bit OUT TRUE lcec.0.DIN1.din-12-not
27 bit OUT FALSE lcec.0.DIN1.din-13
27 bit OUT TRUE lcec.0.DIN1.din-13-not
27 bit OUT FALSE lcec.0.DIN1.din-14
27 bit OUT TRUE lcec.0.DIN1.din-14-not
27 bit OUT FALSE lcec.0.DIN1.din-15
27 bit OUT TRUE lcec.0.DIN1.din-15-not
27 bit OUT FALSE lcec.0.DIN1.din-2 ==> nastroj-unlocking
27 bit OUT TRUE lcec.0.DIN1.din-2-not
27 bit OUT FALSE lcec.0.DIN1.din-3 ==> sani-nahore
27 bit OUT TRUE lcec.0.DIN1.din-3-not ==> sani-je-nahore
27 bit OUT FALSE lcec.0.DIN1.din-4 ==> nizky-tlak
27 bit OUT TRUE lcec.0.DIN1.din-4-not
27 bit OUT FALSE lcec.0.DIN1.din-5
27 bit OUT TRUE lcec.0.DIN1.din-5-not
27 bit OUT FALSE lcec.0.DIN1.din-6
27 bit OUT TRUE lcec.0.DIN1.din-6-not
27 bit OUT FALSE lcec.0.DIN1.din-7
27 bit OUT TRUE lcec.0.DIN1.din-7-not
27 bit OUT FALSE lcec.0.DIN1.din-8
27 bit OUT TRUE lcec.0.DIN1.din-8-not
27 bit OUT FALSE lcec.0.DIN1.din-9
27 bit OUT TRUE lcec.0.DIN1.din-9-not
27 bit OUT TRUE lcec.0.DIN1.slave-online
27 bit OUT TRUE lcec.0.DIN1.slave-oper
27 bit OUT FALSE lcec.0.DIN1.slave-state-init
27 bit OUT TRUE lcec.0.DIN1.slave-state-op
27 bit OUT FALSE lcec.0.DIN1.slave-state-preop
27 bit OUT FALSE lcec.0.DIN1.slave-state-safeop
27 bit OUT FALSE lcec.0.DIN2.din-0
27 bit OUT TRUE lcec.0.DIN2.din-0-not
27 bit OUT FALSE lcec.0.DIN2.din-1
27 bit OUT TRUE lcec.0.DIN2.din-1-not
27 bit OUT FALSE lcec.0.DIN2.din-10
27 bit OUT TRUE lcec.0.DIN2.din-10-not
27 bit OUT FALSE lcec.0.DIN2.din-11
27 bit OUT TRUE lcec.0.DIN2.din-11-not
27 bit OUT FALSE lcec.0.DIN2.din-12
27 bit OUT TRUE lcec.0.DIN2.din-12-not
27 bit OUT FALSE lcec.0.DIN2.din-13
27 bit OUT TRUE lcec.0.DIN2.din-13-not
27 bit OUT FALSE lcec.0.DIN2.din-14
27 bit OUT TRUE lcec.0.DIN2.din-14-not
27 bit OUT FALSE lcec.0.DIN2.din-15
27 bit OUT TRUE lcec.0.DIN2.din-15-not
27 bit OUT FALSE lcec.0.DIN2.din-2
27 bit OUT TRUE lcec.0.DIN2.din-2-not
27 bit OUT FALSE lcec.0.DIN2.din-3
27 bit OUT TRUE lcec.0.DIN2.din-3-not
27 bit OUT FALSE lcec.0.DIN2.din-4
27 bit OUT TRUE lcec.0.DIN2.din-4-not
27 bit OUT FALSE lcec.0.DIN2.din-5
27 bit OUT TRUE lcec.0.DIN2.din-5-not
27 bit OUT FALSE lcec.0.DIN2.din-6
27 bit OUT TRUE lcec.0.DIN2.din-6-not
27 bit OUT FALSE lcec.0.DIN2.din-7
27 bit OUT TRUE lcec.0.DIN2.din-7-not
27 bit OUT FALSE lcec.0.DIN2.din-8
27 bit OUT TRUE lcec.0.DIN2.din-8-not
27 bit OUT FALSE lcec.0.DIN2.din-9
27 bit OUT TRUE lcec.0.DIN2.din-9-not
27 bit OUT TRUE lcec.0.DIN2.slave-online
27 bit OUT TRUE lcec.0.DIN2.slave-oper
27 bit OUT FALSE lcec.0.DIN2.slave-state-init
27 bit OUT TRUE lcec.0.DIN2.slave-state-op
27 bit OUT FALSE lcec.0.DIN2.slave-state-preop
27 bit OUT FALSE lcec.0.DIN2.slave-state-safeop
27 bit IN FALSE lcec.0.DOUT1.dout-0 <== spindle-on
27 bit IN FALSE lcec.0.DOUT1.dout-1 <== nastroj-lock
27 bit IN FALSE lcec.0.DOUT1.dout-10
27 bit IN FALSE lcec.0.DOUT1.dout-11
27 bit IN FALSE lcec.0.DOUT1.dout-12
27 bit IN FALSE lcec.0.DOUT1.dout-13 <== coolant-mist
27 bit IN FALSE lcec.0.DOUT1.dout-14
27 bit IN FALSE lcec.0.DOUT1.dout-15
27 bit IN FALSE lcec.0.DOUT1.dout-2 <== nastroj-unlock
27 bit IN FALSE lcec.0.DOUT1.dout-3 <== sani-nahoru
27 bit IN FALSE lcec.0.DOUT1.dout-4 <== sani-dolu
27 bit IN FALSE lcec.0.DOUT1.dout-5 <== coolant-mist
27 bit IN FALSE lcec.0.DOUT1.dout-6 <== dorazy-nahoru
27 bit IN FALSE lcec.0.DOUT1.dout-7 <== dorazy-dolu
27 bit IN TRUE lcec.0.DOUT1.dout-8 <== z-enable
27 bit IN FALSE lcec.0.DOUT1.dout-9
27 bit OUT TRUE lcec.0.DOUT1.slave-online
27 bit OUT TRUE lcec.0.DOUT1.slave-oper
27 bit OUT FALSE lcec.0.DOUT1.slave-state-init
27 bit OUT TRUE lcec.0.DOUT1.slave-state-op
27 bit OUT FALSE lcec.0.DOUT1.slave-state-preop
27 bit OUT FALSE lcec.0.DOUT1.slave-state-safeop
27 bit IN FALSE lcec.0.DOUT2.dout-0
27 bit IN FALSE lcec.0.DOUT2.dout-1
27 bit IN FALSE lcec.0.DOUT2.dout-10
27 bit IN FALSE lcec.0.DOUT2.dout-11
27 bit IN FALSE lcec.0.DOUT2.dout-12
27 bit IN FALSE lcec.0.DOUT2.dout-13
27 bit IN FALSE lcec.0.DOUT2.dout-14
27 bit IN FALSE lcec.0.DOUT2.dout-15
27 bit IN FALSE lcec.0.DOUT2.dout-2
27 bit IN FALSE lcec.0.DOUT2.dout-3
27 bit IN FALSE lcec.0.DOUT2.dout-4
27 bit IN FALSE lcec.0.DOUT2.dout-5
27 bit IN FALSE lcec.0.DOUT2.dout-6
27 bit IN FALSE lcec.0.DOUT2.dout-7
27 bit IN FALSE lcec.0.DOUT2.dout-8
27 bit IN FALSE lcec.0.DOUT2.dout-9
27 bit OUT TRUE lcec.0.DOUT2.slave-online
27 bit OUT TRUE lcec.0.DOUT2.slave-oper
27 bit OUT FALSE lcec.0.DOUT2.slave-state-init
27 bit OUT TRUE lcec.0.DOUT2.slave-state-op
27 bit OUT FALSE lcec.0.DOUT2.slave-state-preop
27 bit OUT FALSE lcec.0.DOUT2.slave-state-safeop
27 bit OUT TRUE lcec.0.EK1100.slave-online
27 bit OUT TRUE lcec.0.EK1100.slave-oper
27 bit OUT FALSE lcec.0.EK1100.slave-state-init
27 bit OUT TRUE lcec.0.EK1100.slave-state-op
27 bit OUT FALSE lcec.0.EK1100.slave-state-preop
27 bit OUT FALSE lcec.0.EK1100.slave-state-safeop
27 bit IN FALSE lcec.0.RELE1.dout-0
27 bit IN FALSE lcec.0.RELE1.dout-1 <== spindle-cw
27 bit OUT TRUE lcec.0.RELE1.slave-online
27 bit OUT TRUE lcec.0.RELE1.slave-oper
27 bit OUT FALSE lcec.0.RELE1.slave-state-init
27 bit OUT TRUE lcec.0.RELE1.slave-state-op
27 bit OUT FALSE lcec.0.RELE1.slave-state-preop
27 bit OUT FALSE lcec.0.RELE1.slave-state-safeop
27 bit IN FALSE lcec.0.RELE2.dout-0
27 bit IN FALSE lcec.0.RELE2.dout-1
27 bit OUT TRUE lcec.0.RELE2.slave-online
27 bit OUT TRUE lcec.0.RELE2.slave-oper
27 bit OUT FALSE lcec.0.RELE2.slave-state-init
27 bit OUT TRUE lcec.0.RELE2.slave-state-op
27 bit OUT FALSE lcec.0.RELE2.slave-state-preop
27 bit OUT FALSE lcec.0.RELE2.slave-state-safeop
27 bit IN FALSE lcec.0.RELE3.dout-0
27 bit IN FALSE lcec.0.RELE3.dout-1
27 bit OUT TRUE lcec.0.RELE3.slave-online
27 bit OUT TRUE lcec.0.RELE3.slave-oper
27 bit OUT FALSE lcec.0.RELE3.slave-state-init
27 bit OUT TRUE lcec.0.RELE3.slave-state-op
27 bit OUT FALSE lcec.0.RELE3.slave-state-preop
27 bit OUT FALSE lcec.0.RELE3.slave-state-safeop
27 bit IN FALSE lcec.0.RELE4.dout-0
27 bit IN FALSE lcec.0.RELE4.dout-1 <== spindle-cw
27 bit OUT TRUE lcec.0.RELE4.slave-online
27 bit OUT TRUE lcec.0.RELE4.slave-oper
27 bit OUT FALSE lcec.0.RELE4.slave-state-init
27 bit OUT TRUE lcec.0.RELE4.slave-state-op
27 bit OUT FALSE lcec.0.RELE4.slave-state-preop
27 bit OUT FALSE lcec.0.RELE4.slave-state-safeop
27 u32 I/O 0x00000000 lcec.0.X.enc-ext-hi
27 u32 I/O 0x1C0BB4F6 lcec.0.X.enc-ext-lo
27 bit I/O FALSE lcec.0.X.enc-index-ena
27 bit OUT FALSE lcec.0.X.enc-on-home-neg
27 bit OUT TRUE lcec.0.X.enc-on-home-pos
27 float OUT 553.2193 lcec.0.X.enc-pos
27 float OUT 367.601 lcec.0.X.enc-pos-abs
27 float OUT 367.601 lcec.0.X.enc-pos-enc ==> x-pos-fb
27 bit IN FALSE lcec.0.X.enc-pos-reset
27 s32 OUT 470529270 lcec.0.X.enc-raw
27 u32 OUT 0xFFFFFFFF lcec.0.X.enc-ref-hi
27 u32 OUT 0xF1D6A475 lcec.0.X.enc-ref-lo
27 u32 I/O 0x00000000 lcec.0.X.extenc-ext-hi
27 u32 I/O 0x00000000 lcec.0.X.extenc-ext-lo
27 bit I/O FALSE lcec.0.X.extenc-index-ena
27 bit OUT TRUE lcec.0.X.extenc-on-home-neg
27 bit OUT TRUE lcec.0.X.extenc-on-home-pos
27 float OUT 0 lcec.0.X.extenc-pos
27 float OUT 0 lcec.0.X.extenc-pos-abs
27 float OUT 0 lcec.0.X.extenc-pos-enc
27 bit IN FALSE lcec.0.X.extenc-pos-reset
27 s32 OUT 0 lcec.0.X.extenc-raw
27 u32 OUT 0x00000000 lcec.0.X.extenc-ref-hi
27 u32 OUT 0x00000000 lcec.0.X.extenc-ref-lo
27 bit OUT TRUE lcec.0.X.slave-online
27 bit OUT TRUE lcec.0.X.slave-oper
27 bit OUT FALSE lcec.0.X.slave-state-init
27 bit OUT TRUE lcec.0.X.slave-state-op
27 bit OUT FALSE lcec.0.X.slave-state-preop
27 bit OUT FALSE lcec.0.X.slave-state-safeop
27 bit OUT FALSE lcec.0.X.srv-at-speed
27 bit IN TRUE lcec.0.X.srv-enable <== x-enable
27 bit IN TRUE lcec.0.X.srv-enable-volt
27 bit OUT FALSE lcec.0.X.srv-fault ==> x-amp-fault
27 bit IN FALSE lcec.0.X.srv-fault-reset
27 bit IN FALSE lcec.0.X.srv-halt
27 bit OUT FALSE lcec.0.X.srv-limit-active
27 bit OUT FALSE lcec.0.X.srv-on-disabled
27 bit OUT TRUE lcec.0.X.srv-oper-enabled
27 bit IN FALSE lcec.0.X.srv-quick-stop
27 bit OUT FALSE lcec.0.X.srv-quick-stoped
27 bit OUT TRUE lcec.0.X.srv-ready
27 bit OUT TRUE lcec.0.X.srv-remote
27 bit IN TRUE lcec.0.X.srv-switch-on <== x-enable
27 bit OUT TRUE lcec.0.X.srv-switched-on
27 float IN 0 lcec.0.X.srv-vel-cmd <== x-vel-cmd
27 float OUT 0 lcec.0.X.srv-vel-fb
27 float OUT 0 lcec.0.X.srv-vel-fb-rpm
27 float OUT 0 lcec.0.X.srv-vel-fb-rpm-abs
27 float OUT 0 lcec.0.X.srv-vel-rpm
27 bit OUT TRUE lcec.0.X.srv-volt-enabled
27 bit OUT FALSE lcec.0.X.srv-warning
27 bit OUT FALSE lcec.0.X.srv-zero-speed
27 u32 I/O 0xFFFFFFFF lcec.0.Y1.enc-ext-hi
27 u32 I/O 0xC2BE87E8 lcec.0.Y1.enc-ext-lo
27 bit I/O FALSE lcec.0.Y1.enc-index-ena
27 bit OUT TRUE lcec.0.Y1.enc-on-home-neg
27 bit OUT FALSE lcec.0.Y1.enc-on-home-pos
27 float OUT 2.316141 lcec.0.Y1.enc-pos
27 float OUT 802.8912 lcec.0.Y1.enc-pos-abs
27 float OUT 802.8912 lcec.0.Y1.enc-pos-enc ==> y1-pos-fb
27 bit IN FALSE lcec.0.Y1.enc-pos-reset
27 s32 OUT -1027700760 lcec.0.Y1.enc-raw
27 u32 OUT 0xFFFFFFFF lcec.0.Y1.enc-ref-hi
27 u32 OUT 0xC2EBC49C lcec.0.Y1.enc-ref-lo
27 u32 I/O 0x00000000 lcec.0.Y1.extenc-ext-hi
27 u32 I/O 0x00000000 lcec.0.Y1.extenc-ext-lo
27 bit I/O FALSE lcec.0.Y1.extenc-index-ena
27 bit OUT TRUE lcec.0.Y1.extenc-on-home-neg
27 bit OUT TRUE lcec.0.Y1.extenc-on-home-pos
27 float OUT 0 lcec.0.Y1.extenc-pos
27 float OUT 0 lcec.0.Y1.extenc-pos-abs
27 float OUT 0 lcec.0.Y1.extenc-pos-enc
27 bit IN FALSE lcec.0.Y1.extenc-pos-reset
27 s32 OUT 0 lcec.0.Y1.extenc-raw
27 u32 OUT 0x00000000 lcec.0.Y1.extenc-ref-hi
27 u32 OUT 0x00000000 lcec.0.Y1.extenc-ref-lo
27 bit OUT TRUE lcec.0.Y1.slave-online
27 bit OUT TRUE lcec.0.Y1.slave-oper
27 bit OUT FALSE lcec.0.Y1.slave-state-init
27 bit OUT TRUE lcec.0.Y1.slave-state-op
27 bit OUT FALSE lcec.0.Y1.slave-state-preop
27 bit OUT FALSE lcec.0.Y1.slave-state-safeop
27 bit OUT FALSE lcec.0.Y1.srv-at-speed
27 bit IN TRUE lcec.0.Y1.srv-enable <== y1-enable
27 bit IN TRUE lcec.0.Y1.srv-enable-volt
27 bit OUT FALSE lcec.0.Y1.srv-fault ==> y1-amp-fault
27 bit IN FALSE lcec.0.Y1.srv-fault-reset
27 bit IN FALSE lcec.0.Y1.srv-halt
27 bit OUT FALSE lcec.0.Y1.srv-limit-active
27 bit OUT FALSE lcec.0.Y1.srv-on-disabled
27 bit OUT TRUE lcec.0.Y1.srv-oper-enabled
27 bit IN FALSE lcec.0.Y1.srv-quick-stop
27 bit OUT FALSE lcec.0.Y1.srv-quick-stoped
27 bit OUT TRUE lcec.0.Y1.srv-ready
27 bit OUT TRUE lcec.0.Y1.srv-remote
27 bit IN TRUE lcec.0.Y1.srv-switch-on <== y1-enable
27 bit OUT TRUE lcec.0.Y1.srv-switched-on
27 float IN 0 lcec.0.Y1.srv-vel-cmd <== y1-vel-cmd
27 float OUT -0 lcec.0.Y1.srv-vel-fb
27 float OUT 0 lcec.0.Y1.srv-vel-fb-rpm
27 float OUT 0 lcec.0.Y1.srv-vel-fb-rpm-abs
27 float OUT -0 lcec.0.Y1.srv-vel-rpm
27 bit OUT TRUE lcec.0.Y1.srv-volt-enabled
27 bit OUT FALSE lcec.0.Y1.srv-warning
27 bit OUT FALSE lcec.0.Y1.srv-zero-speed
27 u32 I/O 0x00000000 lcec.0.Y2.enc-ext-hi
27 u32 I/O 0x3D404C81 lcec.0.Y2.enc-ext-lo
27 bit I/O FALSE lcec.0.Y2.enc-index-ena
27 bit OUT FALSE lcec.0.Y2.enc-on-home-neg
27 bit OUT TRUE lcec.0.Y2.enc-on-home-pos
27 float OUT 2.425523 lcec.0.Y2.enc-pos
27 float OUT 802.8313 lcec.0.Y2.enc-pos-abs
27 float OUT 802.8313 lcec.0.Y2.enc-pos-enc ==> y2-pos-fb
27 bit IN FALSE lcec.0.Y2.enc-pos-reset
27 s32 OUT 1027624065 lcec.0.Y2.enc-raw
27 u32 OUT 0x00000000 lcec.0.Y2.enc-ref-hi
27 u32 OUT 0x3D10ECE3 lcec.0.Y2.enc-ref-lo
27 u32 I/O 0x00000000 lcec.0.Y2.extenc-ext-hi
27 u32 I/O 0x00000000 lcec.0.Y2.extenc-ext-lo
27 bit I/O FALSE lcec.0.Y2.extenc-index-ena
27 bit OUT TRUE lcec.0.Y2.extenc-on-home-neg
27 bit OUT TRUE lcec.0.Y2.extenc-on-home-pos
27 float OUT 0 lcec.0.Y2.extenc-pos
27 float OUT 0 lcec.0.Y2.extenc-pos-abs
27 float OUT 0 lcec.0.Y2.extenc-pos-enc
27 bit IN FALSE lcec.0.Y2.extenc-pos-reset
27 s32 OUT 0 lcec.0.Y2.extenc-raw
27 u32 OUT 0x00000000 lcec.0.Y2.extenc-ref-hi
27 u32 OUT 0x00000000 lcec.0.Y2.extenc-ref-lo
27 bit OUT TRUE lcec.0.Y2.slave-online
27 bit OUT TRUE lcec.0.Y2.slave-oper
27 bit OUT FALSE lcec.0.Y2.slave-state-init
27 bit OUT TRUE lcec.0.Y2.slave-state-op
27 bit OUT FALSE lcec.0.Y2.slave-state-preop
27 bit OUT FALSE lcec.0.Y2.slave-state-safeop
27 bit OUT FALSE lcec.0.Y2.srv-at-speed
27 bit IN TRUE lcec.0.Y2.srv-enable <== y2-enable
27 bit IN TRUE lcec.0.Y2.srv-enable-volt
27 bit OUT FALSE lcec.0.Y2.srv-fault ==> y2-amp-fault
27 bit IN FALSE lcec.0.Y2.srv-fault-reset
27 bit IN FALSE lcec.0.Y2.srv-halt
27 bit OUT FALSE lcec.0.Y2.srv-limit-active
27 bit OUT FALSE lcec.0.Y2.srv-on-disabled
27 bit OUT TRUE lcec.0.Y2.srv-oper-enabled
27 bit IN FALSE lcec.0.Y2.srv-quick-stop
27 bit OUT FALSE lcec.0.Y2.srv-quick-stoped
27 bit OUT TRUE lcec.0.Y2.srv-ready
27 bit OUT TRUE lcec.0.Y2.srv-remote
27 bit IN TRUE lcec.0.Y2.srv-switch-on <== y2-enable
27 bit OUT TRUE lcec.0.Y2.srv-switched-on
27 float IN 0 lcec.0.Y2.srv-vel-cmd <== y2-vel-cmd
27 float OUT 0 lcec.0.Y2.srv-vel-fb
27 float OUT 0 lcec.0.Y2.srv-vel-fb-rpm
27 float OUT 0 lcec.0.Y2.srv-vel-fb-rpm-abs
27 float OUT 0 lcec.0.Y2.srv-vel-rpm
27 bit OUT TRUE lcec.0.Y2.srv-volt-enabled
27 bit OUT FALSE lcec.0.Y2.srv-warning
27 bit OUT FALSE lcec.0.Y2.srv-zero-speed
27 u32 I/O 0x00000000 lcec.0.Z.enc-ext-hi
27 u32 I/O 0x032D229F lcec.0.Z.enc-ext-lo
27 bit I/O FALSE lcec.0.Z.enc-index-ena
27 bit OUT FALSE lcec.0.Z.enc-on-home-neg
27 bit OUT TRUE lcec.0.Z.enc-on-home-pos
27 float OUT -0.05378516 lcec.0.Z.enc-pos
27 float OUT 208.1626 lcec.0.Z.enc-pos-abs
27 float OUT 208.1626 lcec.0.Z.enc-pos-enc ==> z-pos-fb
27 bit IN FALSE lcec.0.Z.enc-pos-reset
27 s32 OUT 53289631 lcec.0.Z.enc-raw
27 u32 OUT 0x00000000 lcec.0.Z.enc-ref-hi
27 u32 OUT 0x032D5868 lcec.0.Z.enc-ref-lo
27 u32 I/O 0x00000000 lcec.0.Z.extenc-ext-hi
27 u32 I/O 0x00000000 lcec.0.Z.extenc-ext-lo
27 bit I/O FALSE lcec.0.Z.extenc-index-ena
27 bit OUT TRUE lcec.0.Z.extenc-on-home-neg
27 bit OUT TRUE lcec.0.Z.extenc-on-home-pos
27 float OUT 0 lcec.0.Z.extenc-pos
27 float OUT 0 lcec.0.Z.extenc-pos-abs
27 float OUT 0 lcec.0.Z.extenc-pos-enc
27 bit IN FALSE lcec.0.Z.extenc-pos-reset
27 s32 OUT 0 lcec.0.Z.extenc-raw
27 u32 OUT 0x00000000 lcec.0.Z.extenc-ref-hi
27 u32 OUT 0x00000000 lcec.0.Z.extenc-ref-lo
27 bit OUT TRUE lcec.0.Z.slave-online
27 bit OUT TRUE lcec.0.Z.slave-oper
27 bit OUT FALSE lcec.0.Z.slave-state-init
27 bit OUT TRUE lcec.0.Z.slave-state-op
27 bit OUT FALSE lcec.0.Z.slave-state-preop
27 bit OUT FALSE lcec.0.Z.slave-state-safeop
27 bit OUT FALSE lcec.0.Z.srv-at-speed
27 bit IN TRUE lcec.0.Z.srv-enable <== z-enable
27 bit IN TRUE lcec.0.Z.srv-enable-volt
27 bit OUT FALSE lcec.0.Z.srv-fault ==> z-amp-fault
27 bit IN FALSE lcec.0.Z.srv-fault-reset
27 bit IN FALSE lcec.0.Z.srv-halt
27 bit OUT FALSE lcec.0.Z.srv-limit-active
27 bit OUT FALSE lcec.0.Z.srv-on-disabled
27 bit OUT TRUE lcec.0.Z.srv-oper-enabled ==> z-brake
27 bit IN FALSE lcec.0.Z.srv-quick-stop
27 bit OUT FALSE lcec.0.Z.srv-quick-stoped
27 bit OUT TRUE lcec.0.Z.srv-ready
27 bit OUT TRUE lcec.0.Z.srv-remote
27 bit IN TRUE lcec.0.Z.srv-switch-on <== z-enable
27 bit OUT TRUE lcec.0.Z.srv-switched-on
27 float IN 0 lcec.0.Z.srv-vel-cmd <== z-vel-cmd
27 float OUT 0 lcec.0.Z.srv-vel-fb
27 float OUT 0 lcec.0.Z.srv-vel-fb-rpm
27 float OUT 0 lcec.0.Z.srv-vel-fb-rpm-abs
27 float OUT 0 lcec.0.Z.srv-vel-rpm
27 bit OUT TRUE lcec.0.Z.srv-volt-enabled
27 bit OUT FALSE lcec.0.Z.srv-warning
27 bit OUT FALSE lcec.0.Z.srv-zero-speed
27 bit OUT TRUE lcec.0.all-op
27 bit OUT TRUE lcec.0.link-up
27 s32 OUT 0 lcec.0.pll-err
27 s32 OUT 0 lcec.0.pll-out
27 u32 OUT 0x00000000 lcec.0.pll-reset-count
27 s32 OUT 0 lcec.0.read.time
27 u32 OUT 0x00000010 lcec.0.slaves-responding
27 bit OUT FALSE lcec.0.state-init
27 bit OUT TRUE lcec.0.state-op
27 bit OUT FALSE lcec.0.state-preop
27 bit OUT FALSE lcec.0.state-safeop
27 s32 OUT 0 lcec.0.write.time
27 bit OUT TRUE lcec.all-op ==> ec-all-op
24 u32 OUT 0x00000001 lcec.conf.master-count
24 u32 OUT 0x00000010 lcec.conf.slave-count
27 bit OUT TRUE lcec.link-up ==> ec-link-up
27 s32 OUT 13581 lcec.read-all.time
27 u32 OUT 0x00000010 lcec.slaves-responding ==> ec-slaves-responding
27 bit OUT FALSE lcec.state-init
27 bit OUT TRUE lcec.state-op
27 bit OUT FALSE lcec.state-preop
27 bit OUT FALSE lcec.state-safeop
27 s32 OUT 16929 lcec.write-all.time
39 float IN 0 lowpass.spindle.in
39 bit IN FALSE lowpass.spindle.load
39 float OUT 0 lowpass.spindle.out
39 s32 OUT 90 lowpass.spindle.time
19 s32 OUT 399 motion-command-handler.time
19 s32 OUT 9576 motion-controller.time
19 float IN 1 motion.adaptive-feed
19 float IN 0 motion.analog-in-00
19 float IN 0 motion.analog-in-01
19 float IN 0 motion.analog-in-02
19 float IN 0 motion.analog-in-03
19 float IN 0 motion.analog-in-04
19 float IN 0 motion.analog-in-05
19 float IN 0 motion.analog-in-06
19 float IN 0 motion.analog-in-07
19 float OUT 0 motion.analog-out-00
19 float OUT 0 motion.analog-out-01
19 float OUT 0 motion.analog-out-02
19 float OUT 0 motion.analog-out-03 ==> convert_f_s32_in
19 float OUT 0 motion.analog-out-04
19 float OUT 0 motion.analog-out-05
19 float OUT 0 motion.analog-out-06
19 float OUT 0 motion.analog-out-07
19 bit OUT FALSE motion.coord-error
19 bit OUT FALSE motion.coord-mode
19 float OUT 0 motion.current-vel
19 bit IN FALSE motion.digital-in-00
19 bit IN FALSE motion.digital-in-01
19 bit IN FALSE motion.digital-in-02
19 bit IN FALSE motion.digital-in-03 <== sani-nahore
19 bit IN FALSE motion.digital-in-04 <== nastroj-unlocking
19 bit IN TRUE motion.digital-in-05 <== nastroj-locking
19 bit IN TRUE motion.digital-in-06 <== sani-je-nahore
19 bit IN FALSE motion.digital-in-07 <== nizky-tlak
19 bit IN FALSE motion.digital-in-08
19 bit IN FALSE motion.digital-in-09
19 bit IN FALSE motion.digital-in-10
19 bit IN FALSE motion.digital-in-11
19 bit IN FALSE motion.digital-in-12
19 bit IN FALSE motion.digital-in-13
19 bit IN FALSE motion.digital-in-14
19 bit IN FALSE motion.digital-in-15
19 bit OUT FALSE motion.digital-out-00
19 bit OUT FALSE motion.digital-out-01 ==> probing
19 bit OUT FALSE motion.digital-out-02
19 bit OUT FALSE motion.digital-out-03 ==> writetrigger
19 bit OUT FALSE motion.digital-out-04 ==> readtrigger
19 bit OUT FALSE motion.digital-out-05 ==> sani-nahoru
19 bit OUT FALSE motion.digital-out-06
19 bit OUT FALSE motion.digital-out-07
19 bit OUT FALSE motion.digital-out-08 ==> manual-mode-in
19 bit OUT FALSE motion.digital-out-09 ==> nastroj-lock
19 bit OUT FALSE motion.digital-out-10 ==> nastroj-unlock
19 bit OUT FALSE motion.digital-out-11 ==> sani-dolu
19 bit OUT FALSE motion.digital-out-12 ==> dorazy-nahoru
19 bit OUT FALSE motion.digital-out-13 ==> dorazy-dolu
19 bit OUT FALSE motion.digital-out-14
19 bit OUT FALSE motion.digital-out-15
19 float OUT 0 motion.distance-to-go
19 bit IN TRUE motion.enable
19 bit OUT FALSE motion.eoffset-active
19 bit OUT FALSE motion.eoffset-limited
19 bit IN FALSE motion.feed-hold
19 bit IN FALSE motion.feed-inhibit
19 bit IN FALSE motion.homing-inhibit
19 bit OUT TRUE motion.in-position
19 bit OUT TRUE motion.motion-enabled
19 s32 OUT 0 motion.motion-type
19 bit OUT FALSE motion.on-soft-limit
19 bit IN FALSE motion.probe-input <== probe-in
19 s32 OUT 0 motion.program-line
19 float OUT 0 motion.requested-vel
19 u32 OUT 0x0032593E motion.servo.last-period
19 bit OUT TRUE motion.teleop-mode
19 float OUT 0 motion.tooloffset.a
19 float OUT 0 motion.tooloffset.b
19 float OUT 0 motion.tooloffset.c
19 float OUT 0 motion.tooloffset.u
19 float OUT 0 motion.tooloffset.v
19 float OUT 0 motion.tooloffset.w
19 float OUT 0 motion.tooloffset.x ==> tooloffset-x
19 float OUT 0 motion.tooloffset.y
19 float OUT 23.59505 motion.tooloffset.z ==> tooloffset-z
19 bit OUT FALSE motion.tp-reverse
93 bit IN FALSE oneshot.0.in <== manual-mode-in
93 bit OUT FALSE oneshot.0.out ==> manual-mode-shot
93 bit OUT TRUE oneshot.0.out-not
93 bit IN FALSE oneshot.0.reset
93 s32 OUT 120 oneshot.0.time
93 float OUT 0 oneshot.0.time-left
93 float IN 1 oneshot.0.width
46 float OUT 10574 paramhelper.0.counter
46 s32 IN 0 paramhelper.0.invalue <== convert_f_s32_out
46 s32 OUT 0 paramhelper.0.outvalue
46 bit IN FALSE paramhelper.0.readtrigger <== readtrigger
46 bit IN FALSE paramhelper.0.writetrigger <== writetrigger
81 bit OUT FALSE probe.auto_rott
81 float OUT 0 probe.blockheight
81 float OUT 0 probe.jog-increment
81 float IN 0 probe.number
81 float OUT 0 probe.probeheight
81 float OUT 15 probe.ps_edge_lenght
81 float OUT 0 probe.ps_error
81 float OUT 0 probe.ps_offs_angle
81 float OUT 50 probe.ps_offs_x
81 float OUT 100 probe.ps_offs_y
81 float OUT 0 probe.ps_offs_z
81 float OUT 2 probe.ps_probe_diam
81 float OUT 5 probe.ps_probe_latch
81 float OUT 10 probe.ps_probe_max
81 float OUT 100 probe.ps_probevel
81 float OUT 100 probe.ps_searchvel
81 float OUT 15 probe.ps_xy_clearance
81 float OUT 15 probe.ps_z_clearance
81 bit OUT TRUE probe.set_zero
81 bit IN FALSE probe.toolchange-change <== tool-change
81 bit OUT FALSE probe.toolchange-changed ==> tool-changed
81 s32 IN 0 probe.toolchange-number <== tool-prep-number
81 bit OUT TRUE probe.use_toolmeasurement
30 float OUT 0 pwmgen.0.curr-dc
30 bit I/O FALSE pwmgen.0.dither-pwm
30 bit IN FALSE pwmgen.0.enable <== spindle-on
30 float I/O 1 pwmgen.0.max-dc
30 float I/O 0 pwmgen.0.min-dc
30 float I/O 0 pwmgen.0.offset
30 bit OUT FALSE pwmgen.0.pwm
30 float I/O 0 pwmgen.0.pwm-freq
30 float I/O 24000 pwmgen.0.scale
30 float IN 0 pwmgen.0.value <== spindle-vel-cmd
30 s32 OUT 228 pwmgen.make-pulses.time
30 s32 OUT 264 pwmgen.update.time
20 s32 OUT 40668 servo-thread.time
19 bit IN FALSE spindle.0.amp-fault-in
19 bit IN TRUE spindle.0.at-speed <== spindle-at-speed
19 bit OUT TRUE spindle.0.brake ==> spindle-brake
19 bit OUT FALSE spindle.0.forward ==> spindle-cw
19 bit I/O FALSE spindle.0.index-enable <=> spindle-index-enable
19 bit IN FALSE spindle.0.inhibit
19 bit IN FALSE spindle.0.is-oriented
19 bit OUT FALSE spindle.0.locked
19 bit OUT FALSE spindle.0.on ==> spindle-on
19 bit OUT FALSE spindle.0.orient
19 float OUT 0 spindle.0.orient-angle
19 s32 IN 0 spindle.0.orient-fault
19 s32 OUT 0 spindle.0.orient-mode
19 bit OUT FALSE spindle.0.reverse ==> spindle-ccw
19 float IN 0 spindle.0.revs <== spindle-revs
19 float OUT 0 spindle.0.speed-cmd-rps
19 float IN 0 spindle.0.speed-in <== spindle-vel-fb
19 float OUT 0 spindle.0.speed-out ==> spindle-vel-cmd
19 float OUT 0 spindle.0.speed-out-abs ==> spindle-vel-cmd-rpm-abs
19 float OUT 0 spindle.0.speed-out-rps ==> spindle-vel-cmd-rps
19 float OUT 0 spindle.0.speed-out-rps-abs
42 float IN 802.8313 sum2.0.in0 <== y2-pos-fb
42 float IN 802.8912 sum2.0.in1 <== y1-pos-fb
42 float OUT -0.05991797 sum2.0.out ==> rozdil_y1_y2
42 s32 OUT 72 sum2.0.time
90 float OUT 0 timedelay.0.elapsed
90 bit IN FALSE timedelay.0.in <== manual-mode-shot
90 float IN 0.1 timedelay.0.off-delay
90 float IN 0.8 timedelay.0.on-delay
90 bit OUT FALSE timedelay.0.out ==> manul-mode-out
90 s32 OUT 93 timedelay.0.time
33 float IN 0 x-pid.Dgain
33 float IN 0 x-pid.FF0
33 float IN 0.0866 x-pid.FF1
33 float IN 0 x-pid.FF2
33 float IN 0 x-pid.FF3
33 float IN 0 x-pid.Igain
33 float IN 20 x-pid.Pgain
33 float IN 0 x-pid.bias
33 float IN 367.6009 x-pid.command <== x-pos-cmd
33 float IN 0 x-pid.command-deriv
33 float IN 0.0001 x-pid.deadband
33 s32 OUT 315 x-pid.do-pid-calcs.time
33 bit IN TRUE x-pid.enable <== x-enable
33 float OUT -9.207115e-05 x-pid.error
33 bit IN TRUE x-pid.error-previous-target
33 float IN 367.601 x-pid.feedback <== x-pos-fb
33 float IN 0 x-pid.feedback-deriv
33 bit IN FALSE x-pid.index-enable
33 float IN 0 x-pid.maxcmdD
33 float IN 0 x-pid.maxcmdDD
33 float IN 0 x-pid.maxcmdDDD
33 float IN 0 x-pid.maxerror
33 float IN 0 x-pid.maxerrorD
33 float IN 0 x-pid.maxerrorI
33 float IN 30000 x-pid.maxoutput
33 float OUT 0 x-pid.output ==> x-vel-cmd
33 bit OUT FALSE x-pid.saturated
33 s32 OUT 0 x-pid.saturated-count
33 float OUT 0 x-pid.saturated-s
33 float IN 0 y1-pid.Dgain
33 float IN 0 y1-pid.FF0
33 float IN 0.0866 y1-pid.FF1
33 float IN 0 y1-pid.FF2
33 float IN 0 y1-pid.FF3
33 float IN 0 y1-pid.Igain
33 float IN 20 y1-pid.Pgain
33 float IN 0 y1-pid.bias
33 float IN 802.8913 y1-pid.command <== y1-pos-cmd
33 float IN 0 y1-pid.command-deriv
33 float IN 0.0001 y1-pid.deadband
33 s32 OUT 216 y1-pid.do-pid-calcs.time
33 bit IN TRUE y1-pid.enable <== y1-enable
33 float OUT 3.51561e-05 y1-pid.error
33 bit IN TRUE y1-pid.error-previous-target
33 float IN 802.8912 y1-pid.feedback <== y1-pos-fb
33 float IN 0 y1-pid.feedback-deriv
33 bit IN FALSE y1-pid.index-enable
33 float IN 0 y1-pid.maxcmdD
33 float IN 0 y1-pid.maxcmdDD
33 float IN 0 y1-pid.maxcmdDDD
33 float IN 0 y1-pid.maxerror
33 float IN 0 y1-pid.maxerrorD
33 float IN 0 y1-pid.maxerrorI
33 float IN 30000 y1-pid.maxoutput
33 float OUT 0 y1-pid.output ==> y1-vel-cmd
33 bit OUT FALSE y1-pid.saturated
33 s32 OUT 0 y1-pid.saturated-count
33 float OUT 0 y1-pid.saturated-s
33 float IN 0 y2-pid.Dgain
33 float IN 0 y2-pid.FF0
33 float IN 0.0866 y2-pid.FF1
33 float IN 0 y2-pid.FF2
33 float IN 0 y2-pid.FF3
33 float IN 0 y2-pid.Igain
33 float IN 20 y2-pid.Pgain
33 float IN 0 y2-pid.bias
33 float IN 802.8313 y2-pid.command <== y2-pos-cmd
33 float IN 0 y2-pid.command-deriv
33 float IN 0.0001 y2-pid.deadband
33 s32 OUT 165 y2-pid.do-pid-calcs.time
33 bit IN TRUE y2-pid.enable <== y2-enable
33 float OUT -4.687381e-05 y2-pid.error
33 bit IN TRUE y2-pid.error-previous-target
33 float IN 802.8313 y2-pid.feedback <== y2-pos-fb
33 float IN 0 y2-pid.feedback-deriv
33 bit IN FALSE y2-pid.index-enable
33 float IN 0 y2-pid.maxcmdD
33 float IN 0 y2-pid.maxcmdDD
33 float IN 0 y2-pid.maxcmdDDD
33 float IN 0 y2-pid.maxerror
33 float IN 0 y2-pid.maxerrorD
33 float IN 0 y2-pid.maxerrorI
33 float IN 30000 y2-pid.maxoutput
33 float OUT 0 y2-pid.output ==> y2-vel-cmd
33 bit OUT FALSE y2-pid.saturated
33 s32 OUT 0 y2-pid.saturated-count
33 float OUT 0 y2-pid.saturated-s
33 float IN 0 z-pid.Dgain
33 float IN 0 z-pid.FF0
33 float IN 1.22 z-pid.FF1
33 float IN 0.003 z-pid.FF2
33 float IN 0 z-pid.FF3
33 float IN 0 z-pid.Igain
33 float IN 220 z-pid.Pgain
33 float IN 0 z-pid.bias
33 float IN 208.1626 z-pid.command <== z-pos-cmd
33 float IN 0 z-pid.command-deriv
33 float IN 0.0001 z-pid.deadband
33 s32 OUT 237 z-pid.do-pid-calcs.time
33 bit IN TRUE z-pid.enable <== z-enable
33 float OUT -3.125e-05 z-pid.error
33 bit IN TRUE z-pid.error-previous-target
33 float IN 208.1626 z-pid.feedback <== z-pos-fb
33 float IN 0 z-pid.feedback-deriv
33 bit IN FALSE z-pid.index-enable
33 float IN 0 z-pid.maxcmdD
33 float IN 0 z-pid.maxcmdDD
33 float IN 0 z-pid.maxcmdDDD
33 float IN 0 z-pid.maxerror
33 float IN 0 z-pid.maxerrorD
33 float IN 0 z-pid.maxerrorI
33 float IN 30000 z-pid.maxoutput
33 float OUT 0 z-pid.output ==> z-vel-cmd
33 bit OUT FALSE z-pid.saturated
33 s32 OUT 0 z-pid.saturated-count
33 float OUT 0 z-pid.saturated-s
Thanks a lot Jirka
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
Or - Is it possible that "PID in ASD-A2" and "PID in Lcnc" are fighting?
Thanks a lot jirka
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
if you have it but it is parameter type.I probably don't have lcec.0.x.srv-scale.
Here's the pins
lcec.0.X.pos-scalesetp lcec.0.X.pos-scale [JOINT_0]SCALE[JOINT_0]SCALE = 1If of course, totally normal, in any mode that works, both Position, Speed, Torque, first you have to prove that it works perfectly, I would download the software ASDA-Soft V5.4.1.0 and I would carry out tests to adjust the parameters as much as possible. Once you know until you can get the maximum speed and acceleration, it is a matter of adjusting the PID of linuxcnc a little underneath giving a little margin and finish fine-tuning the small curve.Or - Is it possible that "PID in ASD-A2" and "PID in Lcnc" are fighting?
www.deltaww.com/services/DownloadCenter3...;4;&check=1&hl=en-US
It seems very strange to me, it shouldn't be like this, try setting all scales to 1 and just set the scale in this parameter#net x-pos-fb <= lcec.0.X.enc-pos-enc
setp lcec.0.x.srv-vel-cmd with various values from 0.1 to 30000
and the engine still rotates 4,970 rpm (+/- 20 rpm)
I guess I misunderstood your description.
lcec.0.X.pos-scaleGreeting
Chimeno
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
I have. So that's probably okay.
lcec.0.X.pos-scale
setp lcec.0.X.pos-scale [JOINT_0] SCALE
[JOINT_0]
SCALE = 1
I also have ASDA-Soft V5.4.1.0. I tried Autotuning but I don't know if I did it right.
I arranged with a technician who sells Delta Servo to come and set up my drivers.
I'll ask something else.
1. Sometimes in the Lcnc terminal I get a warning "value" 304800,000000 "......." and then the feed is 10 times slower than usual. But the speed on the screen shows as if he was driving at normal speed. I.e. 12,000 mm / min.
I have to restart Lcnc several times and then everything is ok.
Do you have any idea where the mistake is?
2. Lots of lines with No. 5 in the terminal. I found that it is related to the number of Joints.
Don't know why it's there? Is this a bug for Lcnc?
LINUXCNC - 2.9.0~pre0
Machine configuration directory is '/home/jirka/linuxcnc/configs/CNC_Router_YYXZ'
Machine configuration file is 'CNC_Router_YYXZ.ini'
Starting LinuxCNC...
Found file(REL): ./CNC_Router_YYXZ.hal
Note: Using POSIX realtime
trivkins: coordinates:XYYZA
Joint 0 ==> Axis X
Joint 1 ==> Axis Y
Joint 2 ==> Axis Y
Joint 3 ==> Axis Z
Joint 4 ==> Axis A
Found file(REL): ./CNC_Router_YYXZ-axis.hal
Found file(REL): ./CNC_Router_YYXZ-spindle.hal
Found file(REL): ./CNC_Router_YYXZ-io.hal
APP: halshow found: </usr/bin/halshow>
(0, ' = ', '/usr/bin/gmoccapy')
(1, ' = ', '-ini')
(2, ' = ', '/home/jirka/linuxcnc/configs/CNC_Router_YYXZ/CNC_Router_YYXZ.ini')
Entry = trivkins
Entry = coordinates=XYYZA
found the following coordinates xyyza
Entry = kinstype=B
**** GMOCCAPY GETINIINFO ****
Number of joints = 5
5 COORDINATES found = xyyza
('Fount double letter ', )
joint 0 = axis x
joint 1 = axis y0
joint 2 = axis y1
joint 3 = axis z
joint 4 = axis a
{0: 'x', 1: 'y0', 2: 'y1', 3: 'z', 4: 'a'}
('found kinematics module', )
**** GMOCCAPY GETINIINFO ****
[KINS] KINEMATICS is trivkins
Will use mode to switch between Joints and World mode
hopefully supported by the used <<trivkins>> module
**** GMOCCAPY GETINIINFO ****
Preference file path: /home/jirka/linuxcnc/configs/CNC_Router_YYXZ/CNC_Router_YYXZ.pref
**** GMOCCAPY INFO ****
**** found valid probe config in INI File ****
**** will use auto tool measurement ****
**** GMOCCAPY INFO ****
**** Entering make_DRO
axis_list =
**** GMOCCAPY INFO ****
**** Entering make ref axis button
('Filepath = ', '/usr/share/gmoccapy/images/ref_all.png')
('Filepath = ', '/usr/share/gmoccapy/images/ref_x.png')
('Filepath = ', '/usr/share/gmoccapy/images/ref_y.png')
('Filepath = ', '/usr/share/gmoccapy/images/ref_z.png')
('Filepath = ', '/usr/share/gmoccapy/images/ref_a.png')
('Filepath = ', '/usr/share/gmoccapy/images/unhome.png')
**** GMOCCAPY INFO ****
**** Entering make touch button
**** GMOCCAPY INFO ****
**** Entering make jog increments
**** GMOCCAPY INFO ****
**** Entering make jog button
**** GMOCCAPY INFO ****
**** Entering make macro button
found 0 Macros
**** GMOCCAPY INFO ****
**** arrange DRO
4
**** GMOCCAPY INFO ****
**** Place in table
**** GMOCCAPY INFO ****
**** get DRO order
**** GMOCCAPY INFO ****
**** arrange JOG button
less than 6 axis
/usr/bin/gmoccapy:325: GtkWarning: Invalid icon size 48
self.widgets.window1.show()
all joints must be homed before going into coordinated mode
**** GMOCCAPY INFO ****
**** no audio available! ****
**** PYGST libray not installed? ****
**** is python-gstX.XX installed? ****
**** GMOCCAPY INFO ****
**** Entering init gremlin ****
Kinematics type changed
**** GMOCCAPY INFO ****
**** virtual keyboard program found : <onboard>
**** probe_screen GETINIINFO ****
Preference file path: /home/jirka/linuxcnc/configs/CNC_Router_YYXZ/CNC_Router_YYXZ.pref
**** PROBE SCREEN INFO ****
**** To many increments given in INI File for this screen ****
**** Only the first 5 will be reachable through this screen ****
81788931
56623107
toolnumber = 0 False
**** GMOCCAPY INFO: Gcode.lang found ****
(gmoccapy:20060): GtkSourceView-CRITICAL **: gtk_source_language_manager_set_search_path: assertion 'lm->priv->ids == NULL' failed
**** GMOCCAPY INFO : inifile = /home/jirka/linuxcnc/configs/CNC_Router_YYXZ/CNC_Router_YYXZ.ini ****:
**** GMOCCAPY INFO : postgui halfile = gmoccapy_postgui.hal ****:
1 2
IDLE
MANUAL Mode
RUN
IDLE
hal status motion mode changed
hal status metric mode changed
/usr/bin/gmoccapy:3247: Warning: value "304800,000000" of type 'gfloat' is invalid or out of range for property 'max' of type 'gfloat'
self.widgets[widget].set_property("max", max * self.faktor)
Jog Pin Changed
x+
Jog Button released = x+
Jog Pin Changed
x-
Jog Button released = x-
Jog Pin Changed
y+
Jog Button released = y+
Jog Pin Changed
y-
Jog Button released = y-
Jog Pin Changed
z+
Jog Button released = z+
Jog Pin Changed
z-
Jog Button released = z-
Jog Pin Changed
a+
Jog Button released = a+
Jog Pin Changed
a-
Jog Button released = a-
1 2
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
IDLE
MANUAL Mode
RUN
IDLE
('on button home clicked = ', 'ref_all')
Combi DRO all homed
Combi DRO all homed
Combi DRO all homed
Combi DRO all homed
Combi DRO all homed
Combi DRO all homed
Combi DRO all homed
hal status motion mode changed
Hal Status all homed
IDLE
Jog Button pressed = y+
Jog Button released = y+
Jog Button pressed = y-
Jog Button released = y-
Jog Button pressed = y+
Jog Button released = y+
Jog Button pressed = y+
Jog Button released = y+
Jog Button pressed = y+
Jog Button released = y+
Jog Button pressed = y+
Jog Button released = y+
Jog Button pressed = y+
Jog Button released = y+
Jog Button pressed = y+
Jog Button released = y+
Jog Button pressed = x+
Jog Button released = x+
Thank you very much Jirka
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
Well I do not know the truth, it may have to do with the gmoccapy screen.
Greeting
Chimeno
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
I had a Delta servo service technician.
He tried to set this up.
Autotuning:
The axis portal
J-L = 4, Setting bandwidth from 25Hz to 150Hz, vibrations still occured.
Measured resonance frequency via Scope was 12,3Hz = setting parameters P1-25 = 123 and P1-26 = 1 (higher value causes worse noise) but it did not help. Then I set P1-29 = 1 to automatically find and filter low frequency vibration but vibration were still here with small movement command.
X axis
J-L = 4, Setting bandwidth from 25Hz to 150Hz, best result was around 70-80Hz bandwidth.
Measured resonance frequency via Scope was 2,5Hz = setting parameters P1-25 = 25 and P1-26 = 1 (higher value causes worse noise) but it did not help totally.
Also I tried to set P1-08 = 2 and P1-68 = 50 to make it more smooth, no big change.
When the service technician left, I tried to disassemble the servos and test them on the table.
The result is still the same:
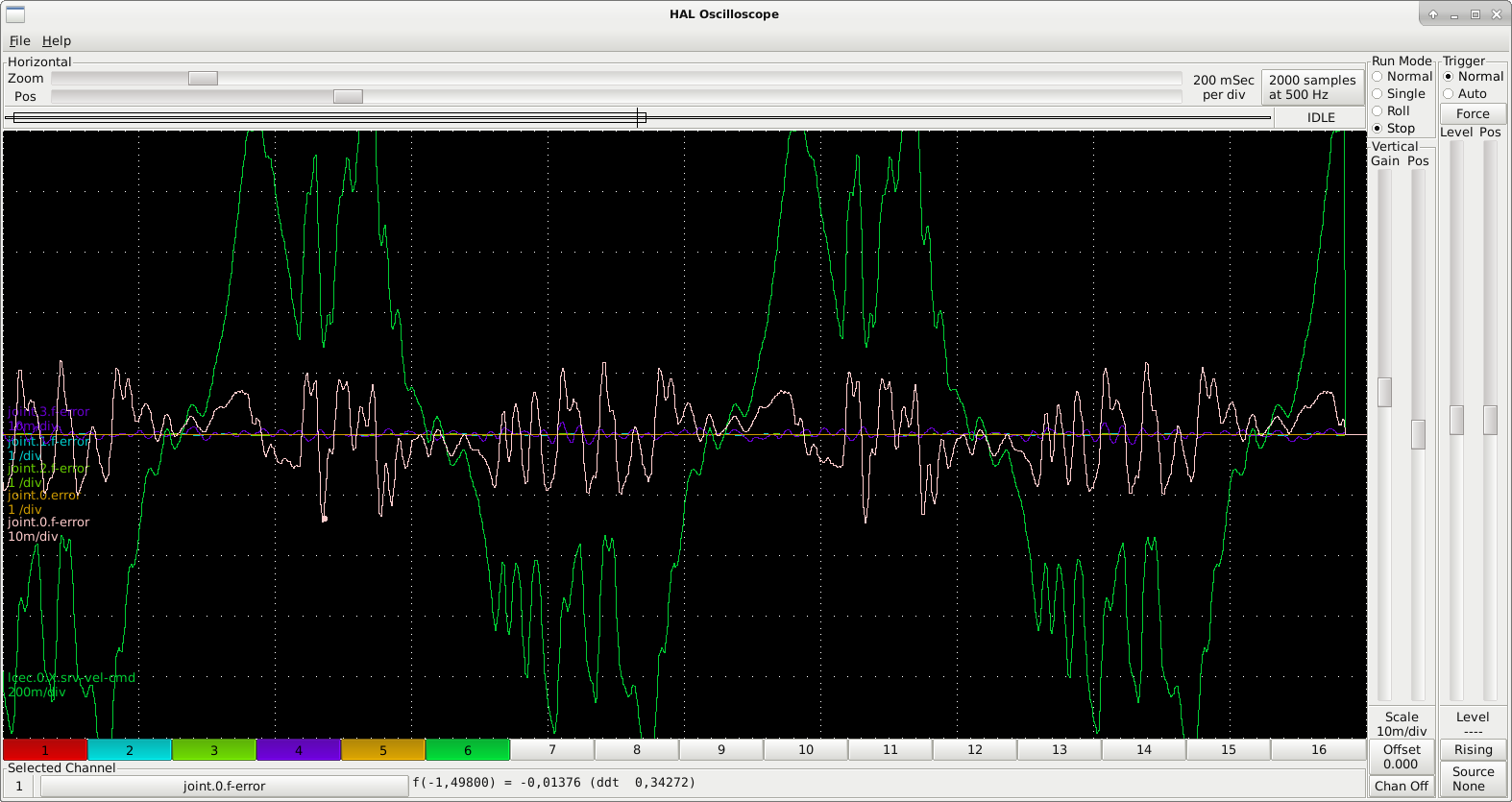
The green curve is vel-cmd.
Is it possible that I have something wrong set up in Linuxcnc?
Thank you jirka
Attachments:
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
Hi @jirkam,
Well I do not know the truth, it may have to do with the gmoccapy screen.
Greeting
Chimeno
Hi.
I tried it in "axis" and more lines with number 5 is even when starting "axis".
Have a nice day Jirka
Please Log in or Create an account to join the conversation.
- jirkam
- Offline
- Senior Member
-
- Posts: 75
- Thank you received: 9
I enclose the configuration. If anyone wanted to look.
File "YYXZ servo X PROFCOM.hal" please rename to "YYXZ servo X PROFCOM.par".
You may notice some errors.
Can anyone help me please?
Say the price "for help".
Thank you very much for your comments.
Jirka
Please Log in or Create an account to join the conversation.