Ethercat HAL driver
- jc2ktr
- Offline
- Premium Member
-

Less
More
- Posts: 87
- Thank you received: 17
18 Feb 2021 17:20 #199304
by jc2ktr
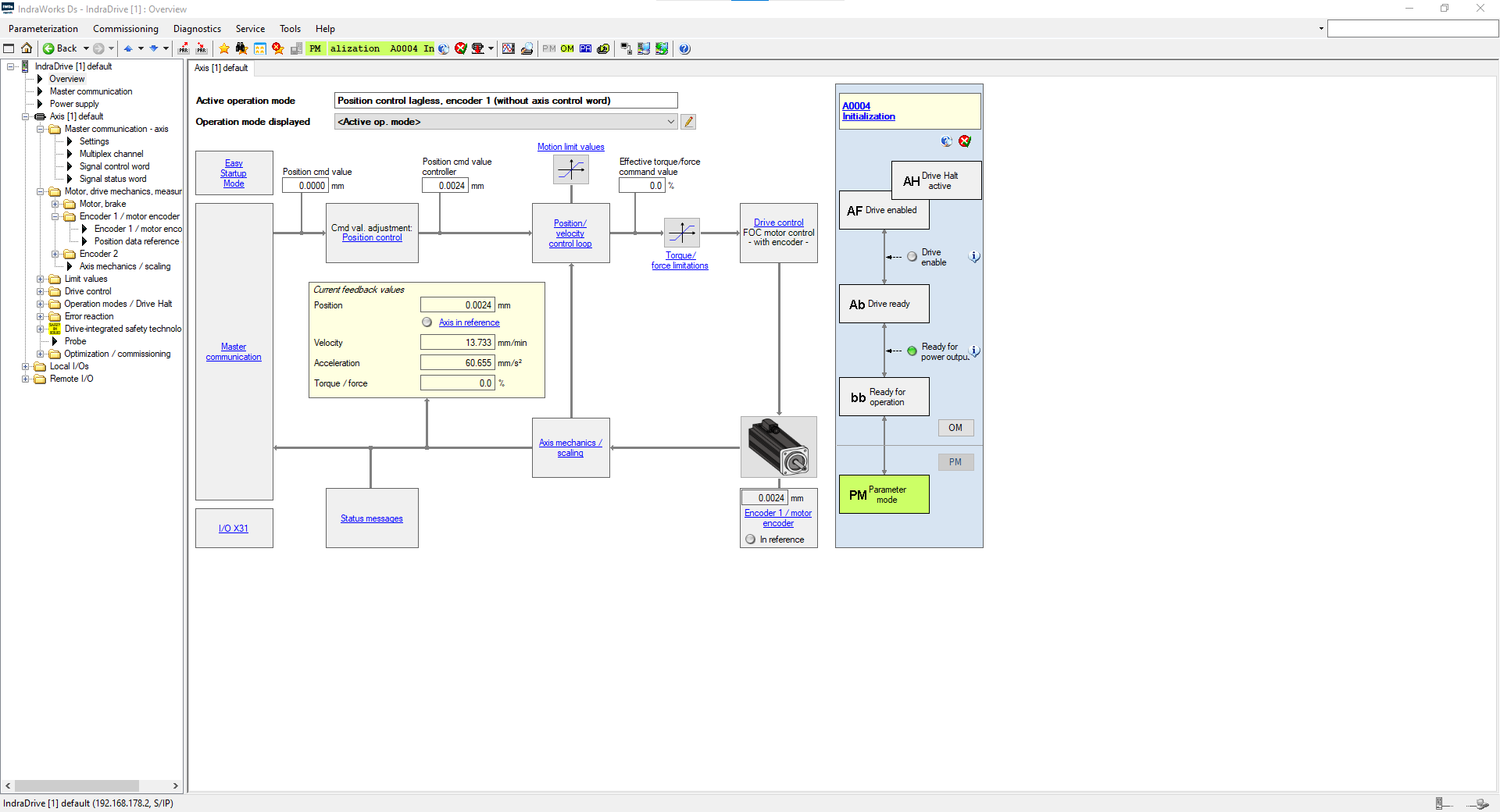
I dont know which OperationMode is selected from LinuxCNC.
In TwinCAT it is Position Control lagless Encoder 1
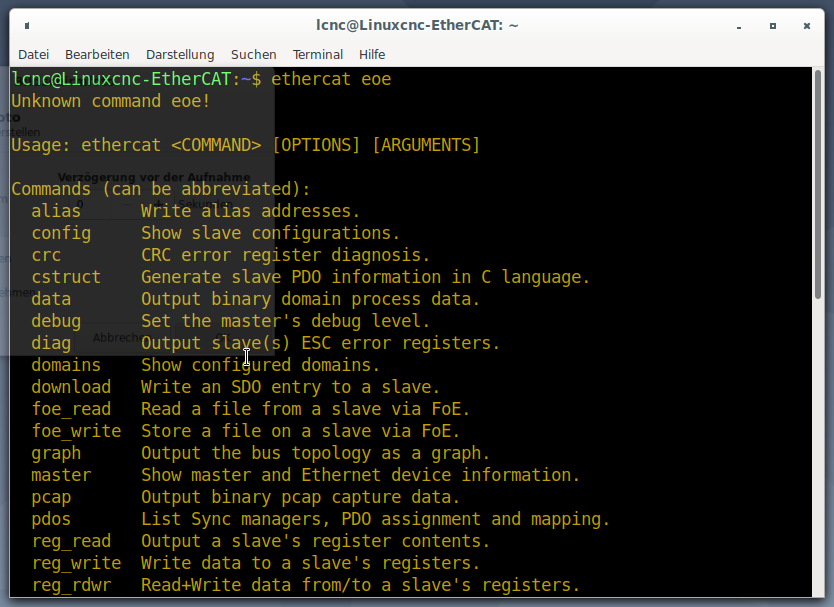
The ethercat eoe command in terminal gives an error message. I tried it earlier today, as i read the IGH Etherlab master manual. seems it isn´t activated.
Replied by jc2ktr on topic Ethercat HAL driver
you've said before that all control stuff is done in the drive, that meens that in linuxcnc there is no pid controller, joint-x-pos-cmd is directly connected to position command pdo.... So the drives behaviour should be as before.
Is there any difference if you control the drive with the indradrive setup functions to the drives behaviour with twincat? (may the twincat control loop makes the movement smooth)
I think that after switching the communcation to coe in indraworks another set of parameters gets active, so this parameters have to get tuned again.
can you please post the terminal output of "ethercat eoe" before and after linuxcnc start.
I dont know which OperationMode is selected from LinuxCNC.
In TwinCAT it is Position Control lagless Encoder 1
The ethercat eoe command in terminal gives an error message. I tried it earlier today, as i read the IGH Etherlab master manual. seems it isn´t activated.
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-

Less
More
- Posts: 790
- Thank you received: 276
18 Feb 2021 18:31 #199323
by db1981
Replied by db1981 on topic Ethercat HAL driver
this is full control loop in the drive, trajectory output from twincat direct to pos-command.
Twincat control is done after switching to CoE, that meens that this are the same Parameters as for LCNC. Strange...
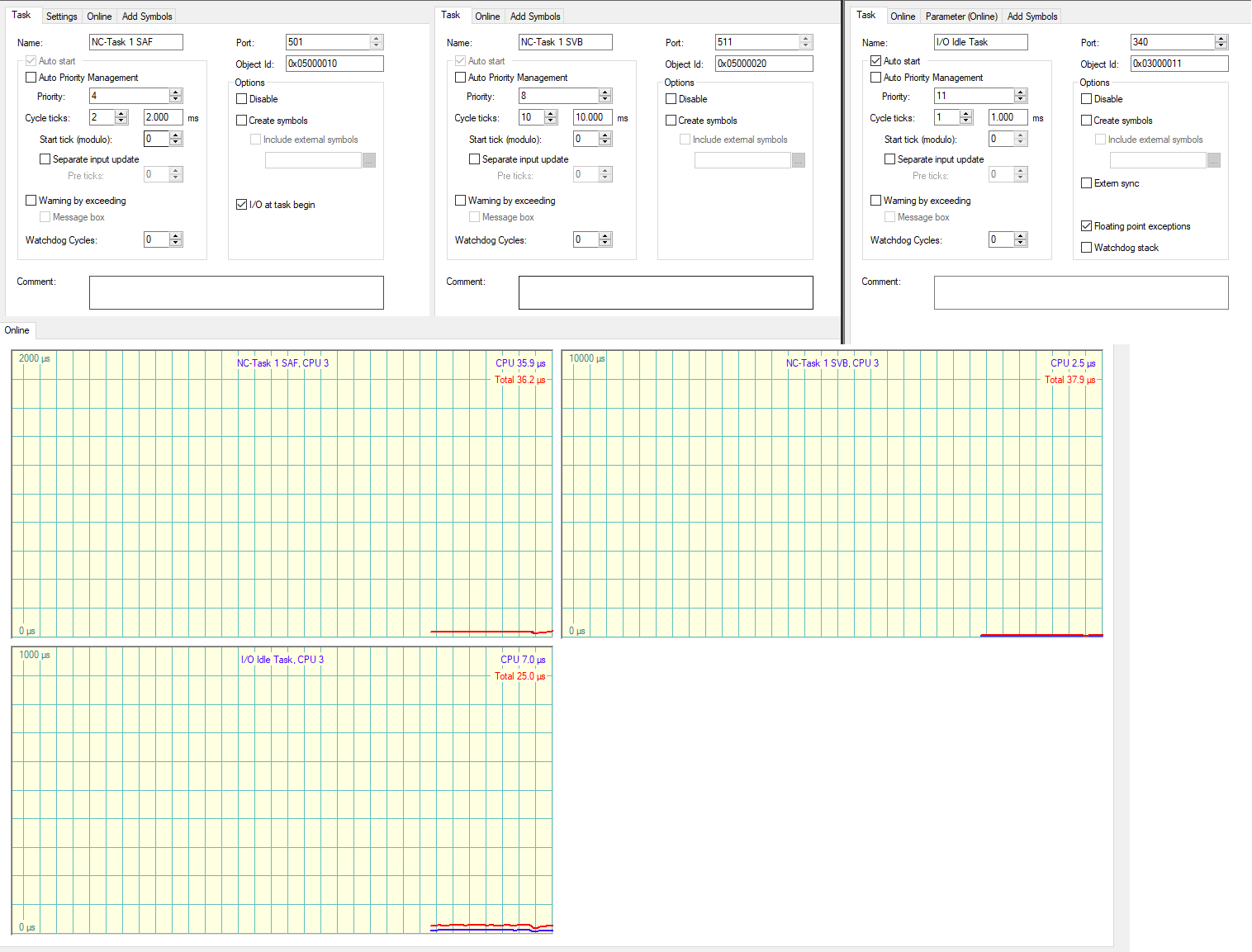
What is Twincat Base Cycle Time, NC SAF Cyle Time and NC SVB Cycle Time ?
What is the output of "ethercat version" ?
Twincat control is done after switching to CoE, that meens that this are the same Parameters as for LCNC. Strange...
What is Twincat Base Cycle Time, NC SAF Cyle Time and NC SVB Cycle Time ?
What is the output of "ethercat version" ?
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
18 Feb 2021 18:39 - 18 Feb 2021 19:15 #199324
by jc2ktr
 The other things i must boot in Windows and look after it.Hope this is what you meant.
The other things i must boot in Windows and look after it.Hope this is what you meant.
Replied by jc2ktr on topic Ethercat HAL driver
EtherCAT Version replies this:this is full control loop in the drive, trajectory output from twincat direct to pos-command. Twincat control is done after switching to CoE, that meens that this are the same Parameters as for LCNC. Strange... What is Twincat Base Cycle Time, NC SAF Cyle Time and NC SVB Cycle Time ? What is the output of "ethercat version" ?
Last edit: 18 Feb 2021 19:15 by jc2ktr. Reason: Image Cycletimes added
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
18 Feb 2021 19:32 #199337
by db1981
Replied by db1981 on topic Ethercat HAL driver
maybe an comm/cycle time issue.
please do an manual ethercat upload after starting lcnc, to check the values of sdo's
-0x1006 Index 0
-0x60C2 Index 1
-0x60C2 Index 2
please do an manual ethercat upload after starting lcnc, to check the values of sdo's
-0x1006 Index 0
-0x60C2 Index 1
-0x60C2 Index 2
Please Log in or Create an account to join the conversation.
- bkt
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1111
- Thank you received: 114
18 Feb 2021 20:42 #199346
by bkt
Replied by bkt on topic Ethercat HAL driver
@db1981 .... yes I means "show axis configuration HAL pin" .... not see my error ...sorry.... dmesg seems normal ...
bkt
bkt
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
18 Feb 2021 20:59 #199348
by db1981
Replied by db1981 on topic Ethercat HAL driver
@bkt
-does the slave 6 goes to op state, after starting linuxcnc? (ethercat slaves)
-does the slave 6 goes to op state, after starting linuxcnc? (ethercat slaves)
The following user(s) said Thank You: bkt
Please Log in or Create an account to join the conversation.
- bkt
-
- Offline
- Platinum Member
-
Less
More
- Posts: 1111
- Thank you received: 114
19 Feb 2021 08:13 - 19 Feb 2021 08:16 #199379
by bkt
Replied by bkt on topic Ethercat HAL driver
@db1981
Just control .... slaves 6 stay in preop when all other slaves is on op state. Why these? It need a specific sdoConfig? generic drive is not enought?
Just control .... slaves 6 stay in preop when all other slaves is on op state. Why these? It need a specific sdoConfig? generic drive is not enought?
Last edit: 19 Feb 2021 08:16 by bkt.
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
19 Feb 2021 09:13 #199382
by db1981
Replied by db1981 on topic Ethercat HAL driver
@bkt
please post the output of "ethercat pdos -p6" .
Is this an brand new or used EL5151? May it has been switched to counter mode or an custom process image.
please post the output of "ethercat pdos -p6" .
Is this an brand new or used EL5151? May it has been switched to counter mode or an custom process image.
The following user(s) said Thank You: bkt
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
19 Feb 2021 12:44 #199413
by jc2ktr
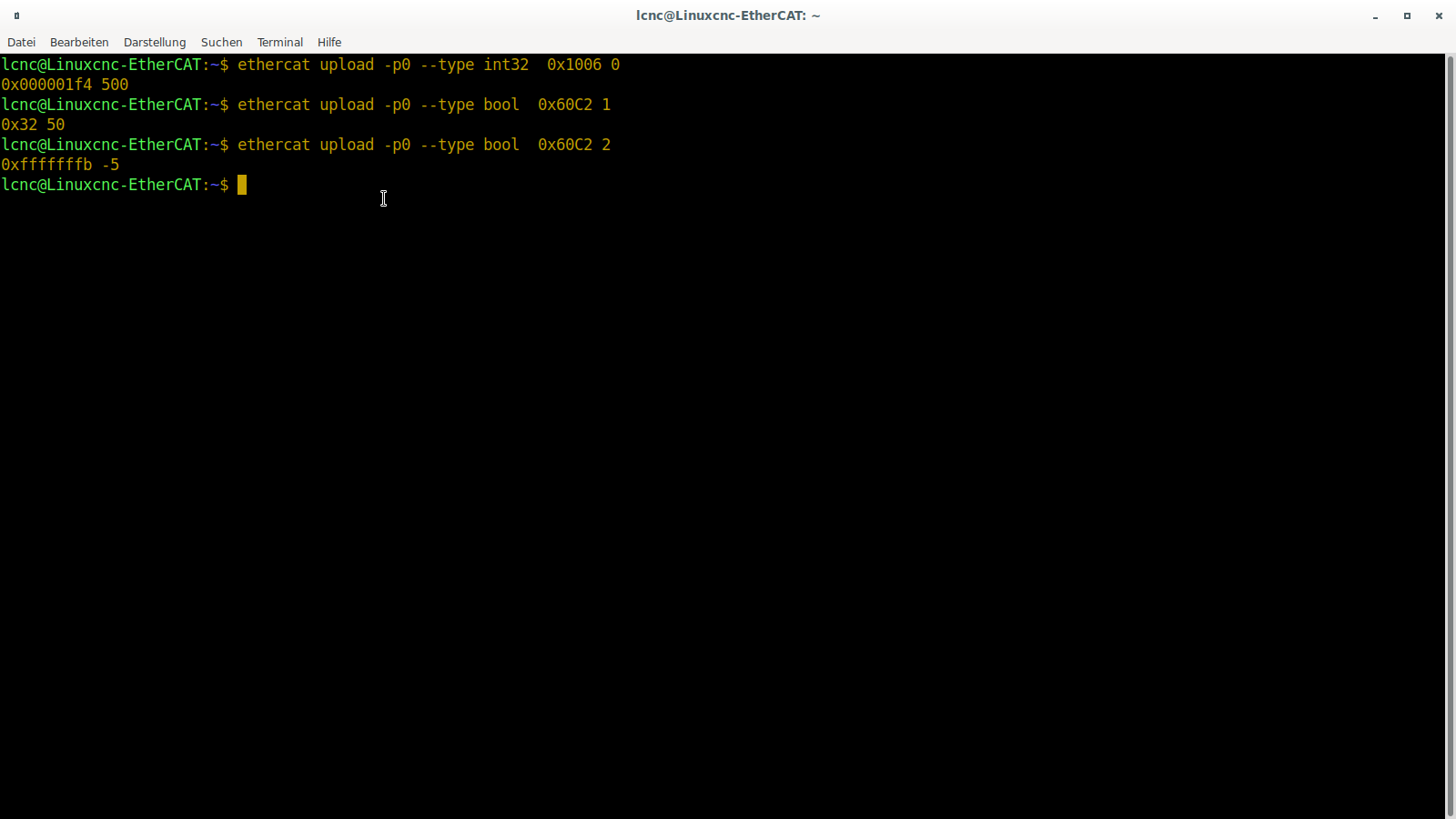
which type of value are them?
lcnc@Linuxcnc-EtherCAT:~$ ethercat upload -p0 --type int32 0x1006 0 = 0x000001f4 500
lcnc@Linuxcnc-EtherCAT:~$ ethercat upload -p0 --type bool 0x60C2 1 = 0x32 50
lcnc@Linuxcnc-EtherCAT:~$ ethercat upload -p0 --type bool 0x60C2 2 = 0xfffffffb -5
hope i got the types right.
Replied by jc2ktr on topic Ethercat HAL driver
maybe an comm/cycle time issue.
please do an manual ethercat upload after starting lcnc, to check the values of sdo's
-0x1006 Index 0
-0x60C2 Index 1
-0x60C2 Index 2
which type of value are them?
lcnc@Linuxcnc-EtherCAT:~$ ethercat upload -p0 --type int32 0x1006 0 = 0x000001f4 500
lcnc@Linuxcnc-EtherCAT:~$ ethercat upload -p0 --type bool 0x60C2 1 = 0x32 50
lcnc@Linuxcnc-EtherCAT:~$ ethercat upload -p0 --type bool 0x60C2 2 = 0xfffffffb -5
hope i got the types right.
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
19 Feb 2021 13:25 - 19 Feb 2021 13:53 #199417
by db1981
Replied by db1981 on topic Ethercat HAL driver
hello,
0x1006 is the com cycle time = 500µs this is equal to your ethercat app cycle time
0x60C2 is the interpolation time, it's also 50ms * 10^ -5 = 500µs.
is your servo_period in the ini (thread which executes lcec_read/write) also set to 500000ns (2khz) ?
0x1006 is the com cycle time = 500µs this is equal to your ethercat app cycle time
0x60C2 is the interpolation time, it's also 50ms * 10^ -5 = 500µs.
is your servo_period in the ini (thread which executes lcec_read/write) also set to 500000ns (2khz) ?
Last edit: 19 Feb 2021 13:53 by db1981. Reason: changed ns to µs, typo
Please Log in or Create an account to join the conversation.
Time to create page: 0.847 seconds