Ethercat HAL driver
- arvidb
-

- Offline
- Platinum Member
-

- Posts: 459
- Thank you received: 158
Please Log in or Create an account to join the conversation.
- bkt
-

- Offline
- Platinum Member
-
- Posts: 1111
- Thank you received: 114
@DB1981
-You want to control the drive in velocity mode?
-You have problem with the pos feedbackvalue? Feedback from the drive is an signed Integer, automatic conversion is not automatic done, every 16 bits, there will be an huge step in the value. I think the feedback is an raw value, so you need something like an counter/encoder logic.
Velocity mode no for sure ... Because RXPDO 1601 and TxPDO1A01 ... plus feedback (6064h) is DINT value as 607Ah (cmdPosition) that is DINT. <sdoConfig idx="6060" subIdx="0"><sdoDataRaw data="08"/></sdoConfig> for you these is CSV and not CSP ??? but CSP in maxine manual is bit=7 so 08 is correct value i think (0-1-2 ....7 means i count 8 number) ... is not right these?
@arvidb
bkt: I'm not sure if this actually matters, but one thing that looks strange in your xml file is that you're mixing radix characters between the scale parameters: sometimes you use '.' (period) and sometimes ',' (comma).
if you read better ',' (comma) for sign decimal point is comment out .... but actually reading the topic you don't notice that these lines are commented out .... however do not worry I have already noticed that it was a problem .... in fact the xml file and Lcnc accept the '.' (point) and not the ',' to mark the decimals .... so my mistake .... I correct the xml file by removing all the commented lines so that no one is misled by reading at speed ... NO WORRY there are no scale="0,00008" read from system because <!-- xxxxx --> on xml sintax is equal to /* code c or c++ */ the correct scale is scale="0.000071429"/>
any how thanks for reply and correct my previous so no one make same error of arvidb ... f
bkt
Please Log in or Create an account to join the conversation.
- bkt
-
- Offline
- Platinum Member
-
- Posts: 1111
- Thank you received: 114
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
- Posts: 790
- Thank you received: 276
now it is clearer for me. sorry may be i have understanding problems because of my own rusted english interpreter.....
facts:
-you want to command the drive in cyclic position mode
-control loop in the drive, no pid in linuxcnc
-setting the electronic Gear ration in the drive doesn't work at the moment
-you can enable the drive, the drive reacts correct to the commanded position
your actual problem ?
-feedback scaling in linuxcnc is not correct ?
-the feedback gets worse after some point in movement (~37.5 degree)?
Please Log in or Create an account to join the conversation.
- bkt
-
- Offline
- Platinum Member
-
- Posts: 1111
- Thank you received: 114
your actual problem ?
-feedback scaling in linuxcnc is not correct ?
To answer this: my real problem = I don't understand how it is possible to have a scale of 14000 or 14 since there is the problem of the 1/1000 scale in the generic drive due to decimals. But now that I read your answer I realize that I have to check the electronic gear set by default on the drive and see if the scale of 14 added to the default electronic gear can somehow correspond to the mechanical reduction of 37.5 motor revolutions for have 1 turn of my axis or 360 °. So more than a problem is the will to understand better.
Today, however, I have a second more serious problem .... two out of 3 drives no longer go into run mode .... they go to OP and then by putting an axis in run Lcnc (the first of the ethercat chain) it also goes into run and it I can move, the others remain ready but I cannot move them. If I launch from the terminal (with Axis gui working) "ethercat slaves -v" I don't see anything abnormal except that beyond the slaves "0" (first working drive) I have a "DC system time transmission delay: 0 ns", slaves "1" (second no-working drive) I have a "DC system time transmission delay: 640 ns" .... and the third slaves are at "DC system time transmission delay: 1280 ns" which seems to me to be high times ..... I report the result of the terminal if someone sees anything else that is anomalous that I do not see.
Please Log in or Create an account to join the conversation.
- bkt
-
- Offline
- Platinum Member
-
- Posts: 1111
- Thank you received: 114
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
- Posts: 790
- Thank you received: 276
About dc conf, did you changed anything in your System?
Which Linuxcnc Version? Rip Install? ethercat from SITTNER?
In your ethercat_conf there is "Busklemme" Do you speak German?
Please Log in or Create an account to join the conversation.
- bkt
-
- Offline
- Platinum Member
-
- Posts: 1111
- Thank you received: 114
About version is a rip-install on mint: Linux mine 4.19.1-rt3 #1 SMP PREEMPT RT Thu Aug 13 09:31:04 CEST 2020 x86_64 x86_64 x86_64 GNU/Linux
Having said that you are right: I just tried the configuration with other drivers just out of the box .... everything works fine with those. Both if I use a dc conf like the one I transcribed but also if I use a different one.
I must have obviously messed with twincat 3 scope view or twincat configurator .... the real problem is that I don't know how. I am not familiar with twincat that I have only used a few times in my life and 5/6 years ago now on VS2017 everything is a little different.
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-

- Posts: 87
- Thank you received: 17
Hello @jc2ktr
not if you have already solved it, but the error is in line 11 and 13It stucks at line 12 with a Parse error but i can't solve it.
Hope anyone can take a short look over my File.
I attach the example
ErrorSolution<syncManager idx="0" dir="out"/> </syncManager> <syncManager idx="1" dir="in"/> </syncManager><syncManager idx="0" dir="out"> </syncManager> <syncManager idx="1" dir="in"> </syncManager>
I think you would have to send an email to the Bosch company to see if they can send you the file.Hi folks,
#does someone have the original Bosch-Rexroth XML Description for TwinCAT? The one i can download from the Rexroth page does #not support the firmware of my drive. The drive is FW version 18V34 and the downloadable XML is for 20V26.
#Unfortunatley Rexroth does not have an Donwload Archive on their Website.
#And my Servomotor is not supportet by the new Firmware version.
Greeting Chimeno
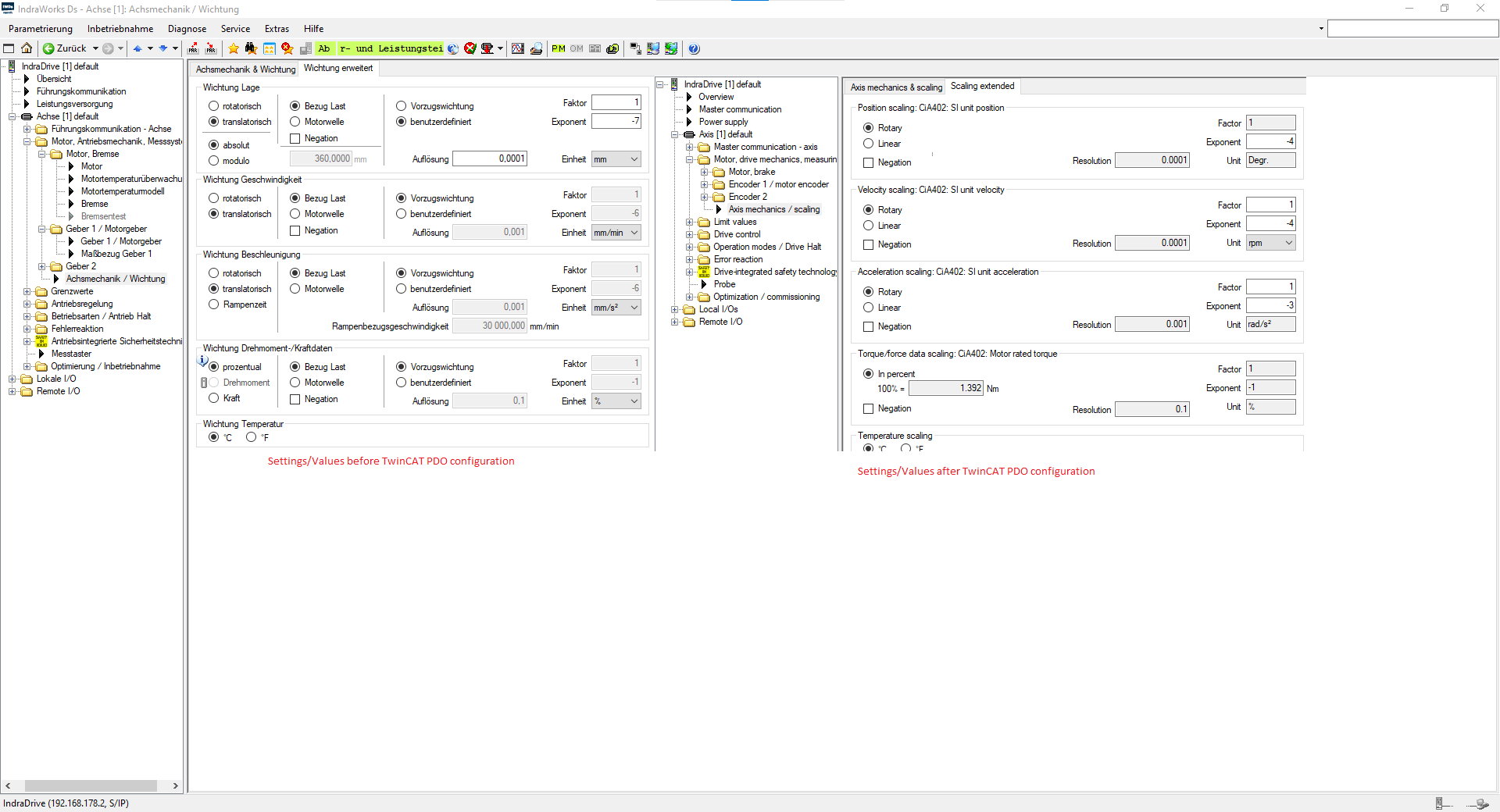
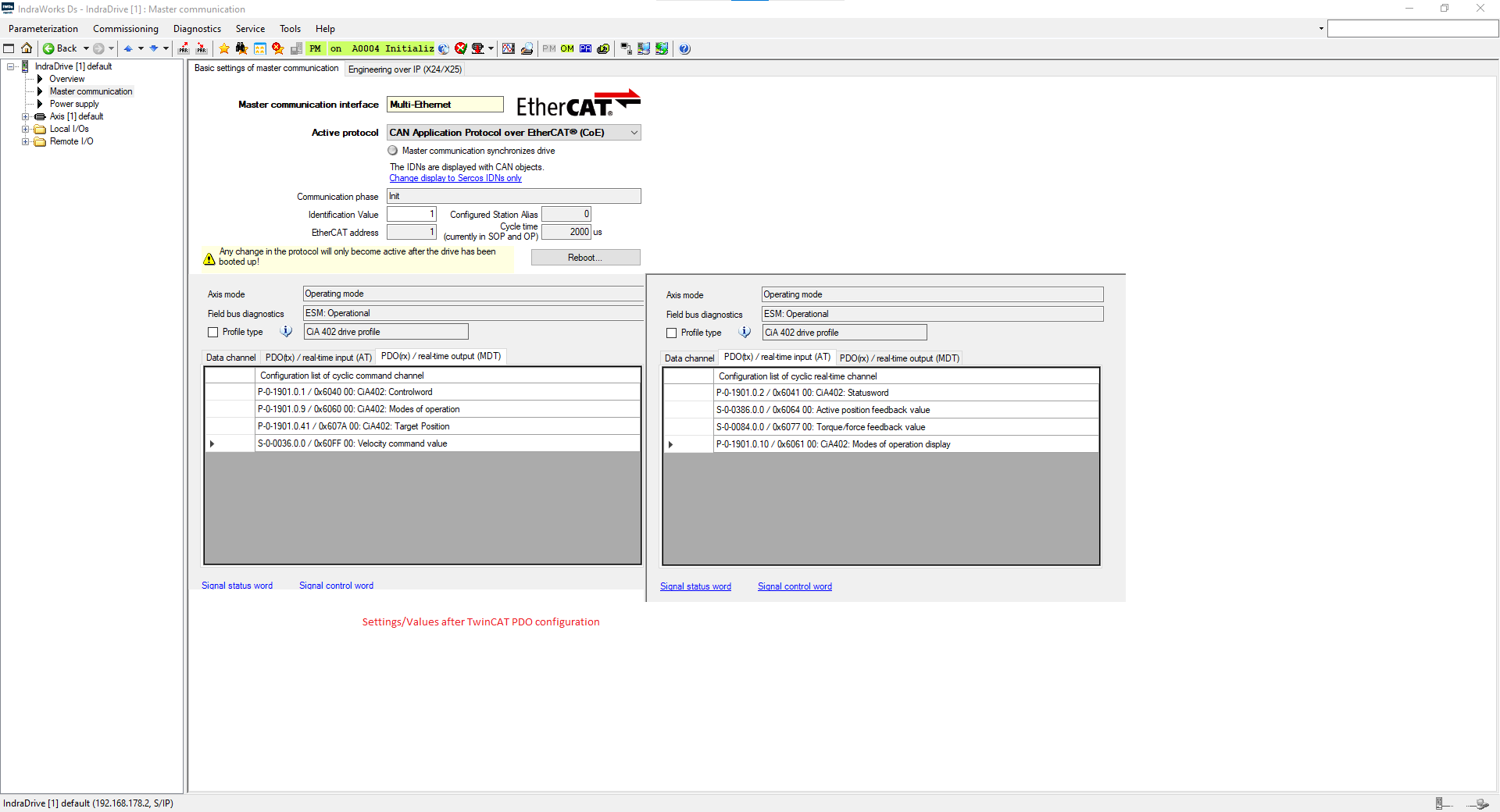
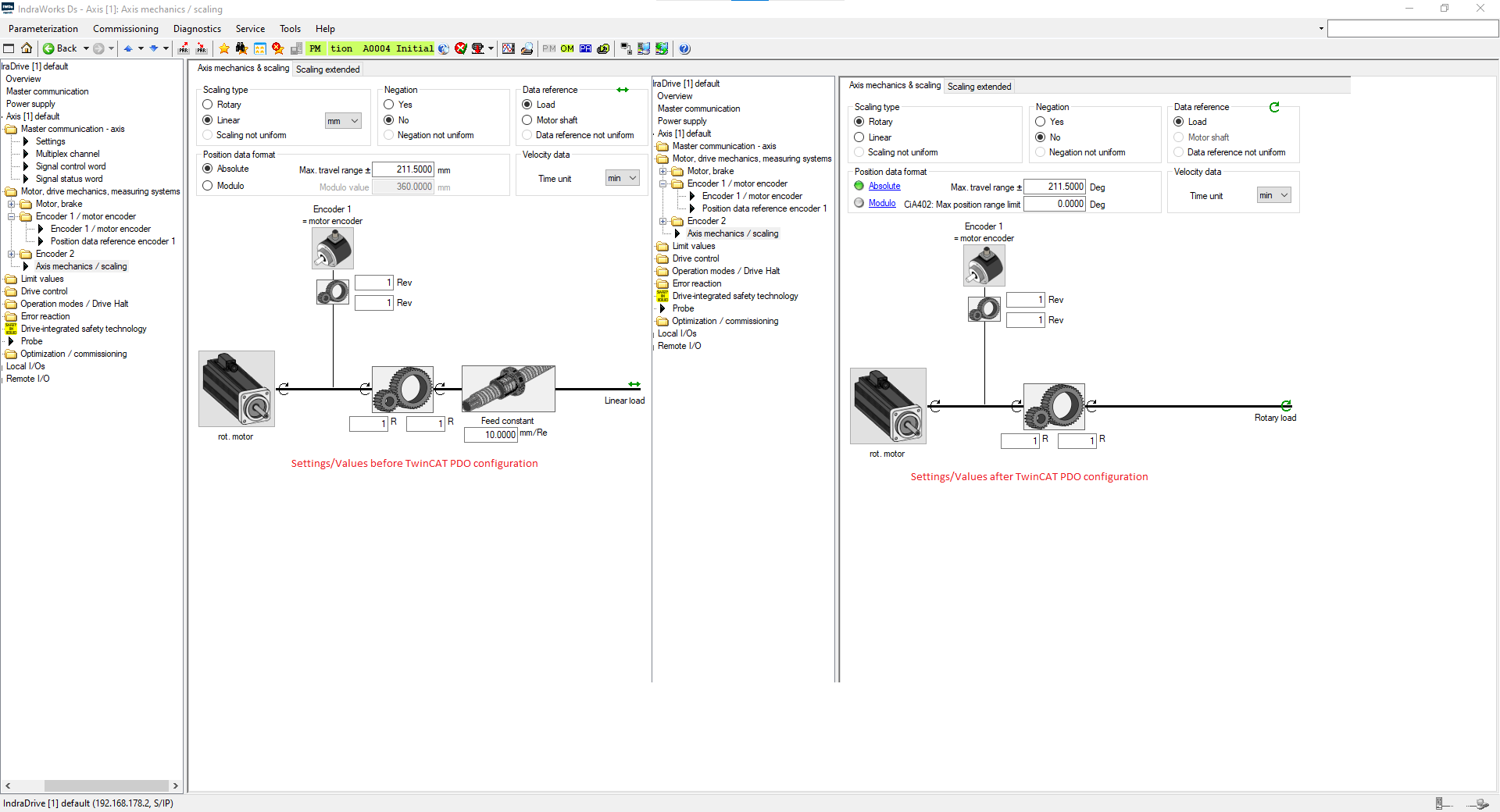
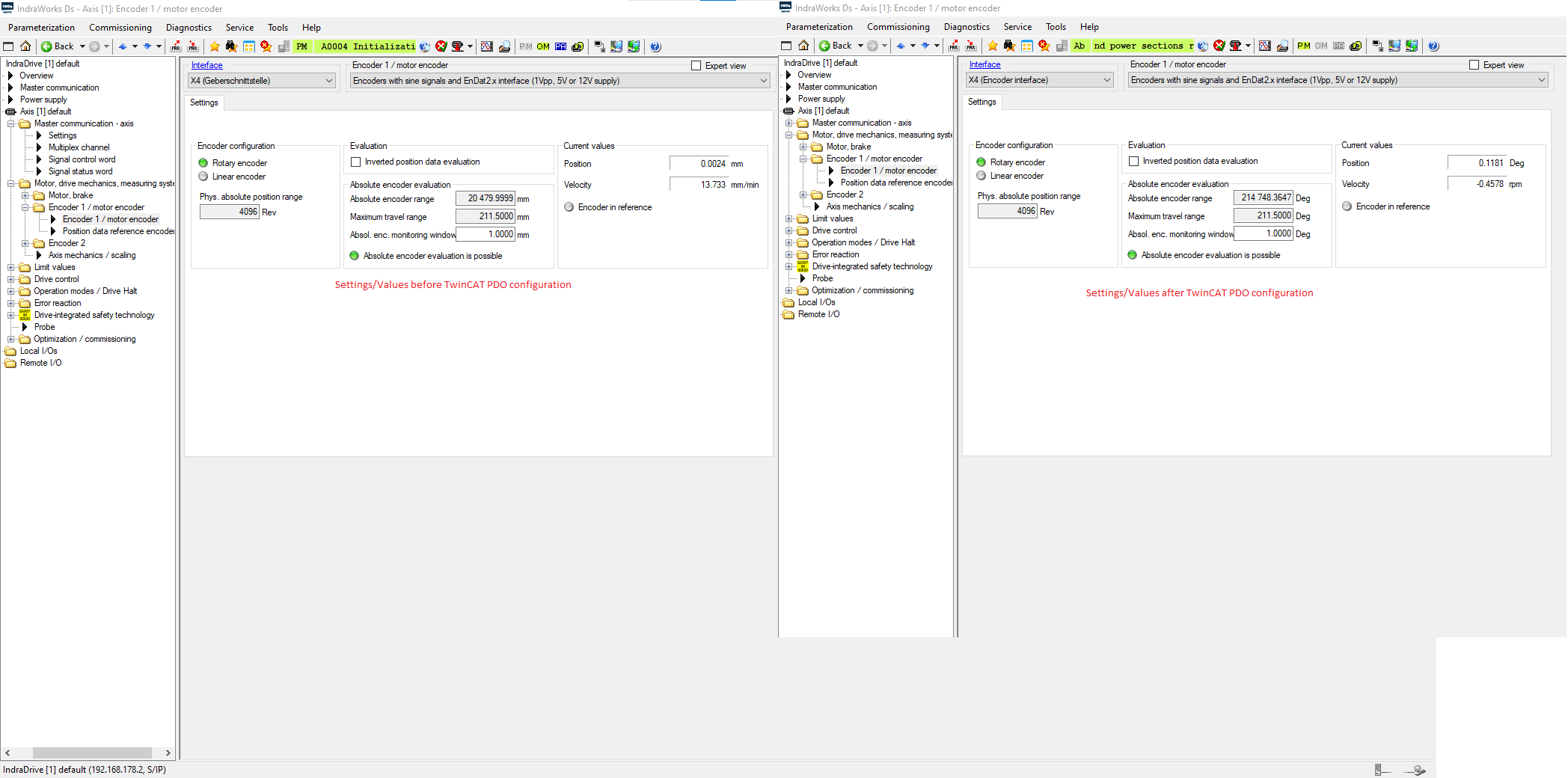
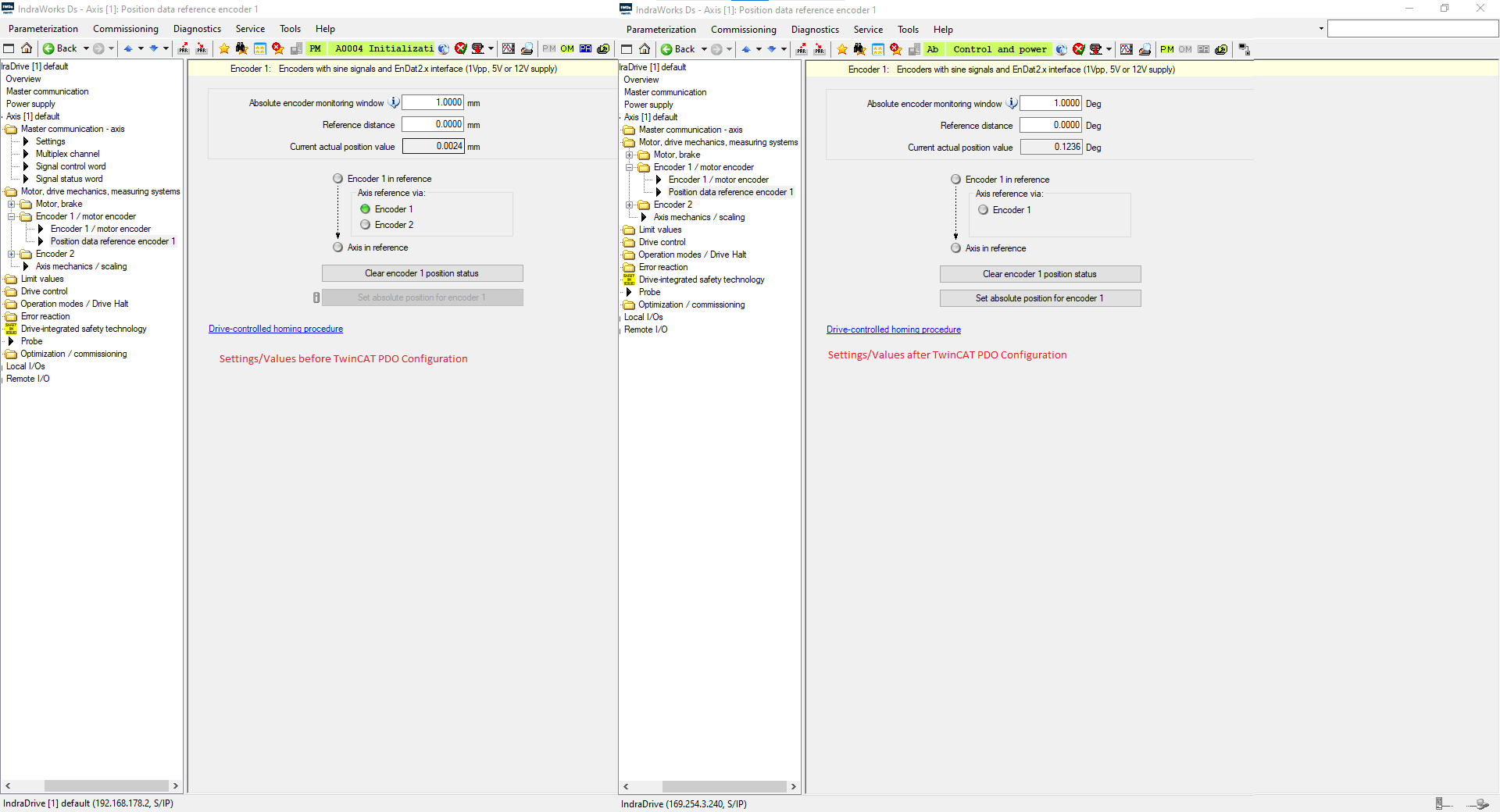
I´ve got my Drive up and running under LinuxCNC, with the Firmware 20V26 and the Rexroth XML for COE which is delivered with the Indraworks DS Software from Rexroth.
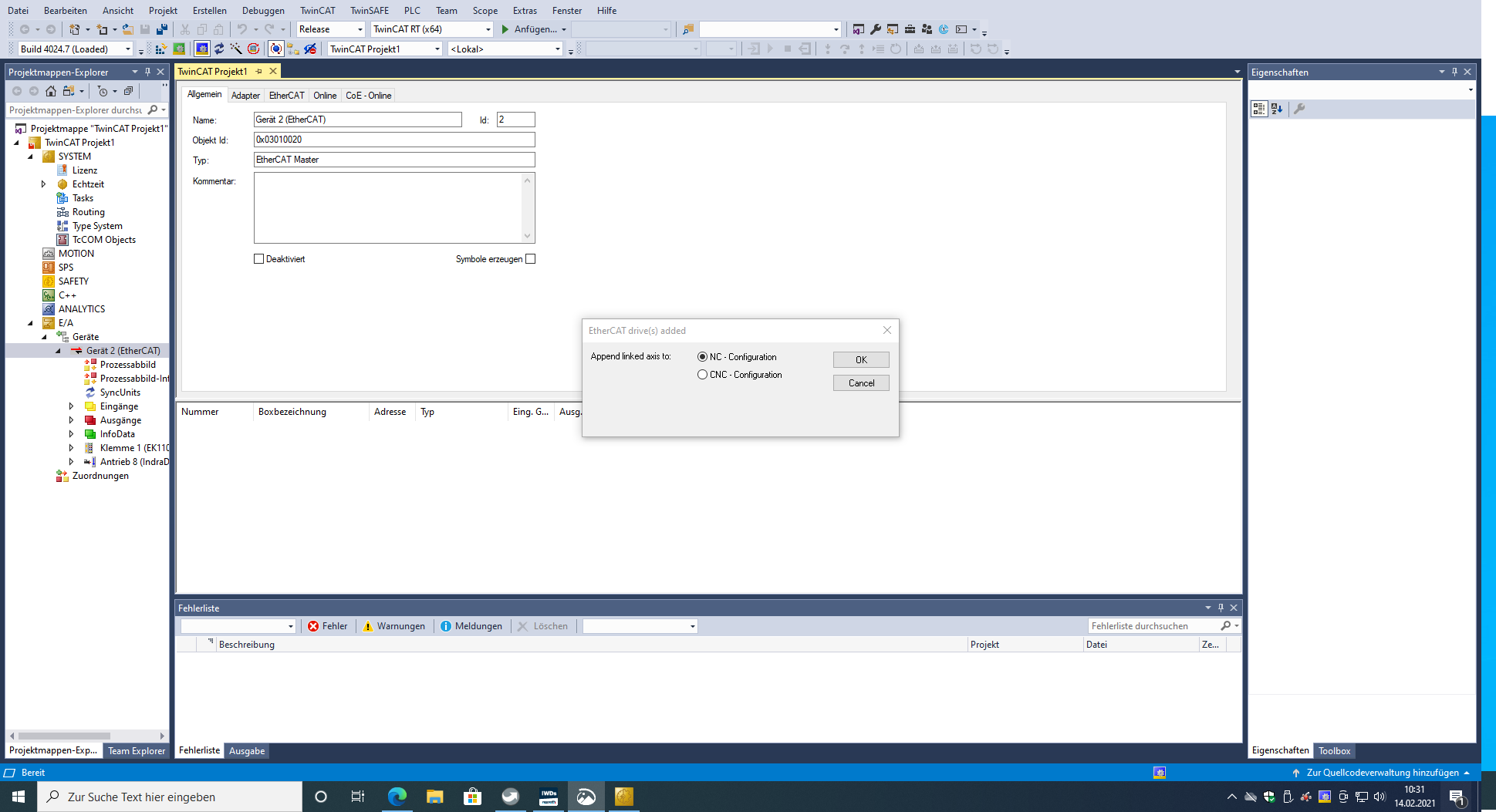
But when i setup the drive with indraworks DS to my needed Scaling and Mechanical setting, and then let TwinCAT configure the Drive that LinuxCNC is able to "control" the drive. all of my previous Parameters will be overridden.
I will add some Images which should provide some of my issues.
When i try to change the Settings after TwinCAT reconfigured them the Indraworks software generates various Error messages which i can´t resolve with my momentary knowledge.
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
- Posts: 790
- Thank you received: 276
the drives get its SDO Parameters at the startup from the Ethercat master, so if this is a drive in which you can't permanently save the initcmds, you will start with an empty drive config.
if you don't tell twincat the values of the idn's, it will change the drives config.
Why do you need twincat to make the drive controlable with linuxcnc?
Please Log in or Create an account to join the conversation.