Ethercat HAL driver
- db1981
- Offline
- Platinum Member
-

Less
More
- Posts: 790
- Thank you received: 276
15 Feb 2021 16:46 #198950
by db1981
Replied by db1981 on topic Ethercat HAL driver
ok, i understand.
Indraworks and Twincat is running on the same PC? The ethercat par file has been created after you connected twincat to the drive?
your steps at the moment are:
-power up the drive
-connect to twincat, start twincat
-conncet to the linux PC
-start linuxcnc , drives goes op?
-without the twincat step, the drive stays safeop or preop ?
please post your (linuxcnc) ethercat_conf.xml
Indraworks and Twincat is running on the same PC? The ethercat par file has been created after you connected twincat to the drive?
your steps at the moment are:
-power up the drive
-connect to twincat, start twincat
-conncet to the linux PC
-start linuxcnc , drives goes op?
-without the twincat step, the drive stays safeop or preop ?
please post your (linuxcnc) ethercat_conf.xml
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-

Less
More
- Posts: 87
- Thank you received: 17
15 Feb 2021 18:05 - 15 Feb 2021 18:06 #198952
by jc2ktr
Indraworks and Twincat is running on the same PC?
Yes Indraworks and TwinCAT are running on the same PC/Windows installation LinuxCNC on the same Machine on a Stand alone installation.
The ethercat par file has been created after you connected twincat to the drive?
The HCS01.1E_W0009_mpb20v26_ethercat.par was created after the TwinCAT connection to the drive.
The HCS01.1E_W0009_mpb20v26_eth.par was created after the the initial Setup to the drive, but before TwinCAT interference.
My steps at the moment are:
-Setup the drive, do the Scaling and Initial Setup in Indraworks over Ethernet. (only once)
-Change the MasterCommunication to EtherCAT COE (only once)
-Restart the Drive start TwinCAT --> Scan for boxes --> Configure PDO´s --> activate Configuration (only once)
-Restart PC load LinuxCNC --> Start LinuxCNC Clear E-Stop & Enable the Machine --> Drive goes from INIT-->SafeOP-->PO-->OP
-Jog the Drive with false Scaling (Changing the Scaling in HAL file leads to F2037 Excessive position command difference
Without TwinCAT step the Drive stays in INIT-State
Replied by jc2ktr on topic Ethercat HAL driver
ok, i understand.
Indraworks and Twincat is running on the same PC? The ethercat par file has been created after you connected twincat to the drive?
your steps at the moment are:
-power up the drive
-connect to twincat, start twincat
-conncet to the linux PC
-start linuxcnc , drives goes op?
-without the twincat step, the drive stays safeop or preop ?
please post your (linuxcnc) ethercat_conf.xml
Indraworks and Twincat is running on the same PC?
Yes Indraworks and TwinCAT are running on the same PC/Windows installation LinuxCNC on the same Machine on a Stand alone installation.
The ethercat par file has been created after you connected twincat to the drive?
The HCS01.1E_W0009_mpb20v26_ethercat.par was created after the TwinCAT connection to the drive.
The HCS01.1E_W0009_mpb20v26_eth.par was created after the the initial Setup to the drive, but before TwinCAT interference.
My steps at the moment are:
-Setup the drive, do the Scaling and Initial Setup in Indraworks over Ethernet. (only once)
-Change the MasterCommunication to EtherCAT COE (only once)
-Restart the Drive start TwinCAT --> Scan for boxes --> Configure PDO´s --> activate Configuration (only once)
-Restart PC load LinuxCNC --> Start LinuxCNC Clear E-Stop & Enable the Machine --> Drive goes from INIT-->SafeOP-->PO-->OP
-Jog the Drive with false Scaling (Changing the Scaling in HAL file leads to F2037 Excessive position command difference
Without TwinCAT step the Drive stays in INIT-State
Last edit: 15 Feb 2021 18:06 by jc2ktr. Reason: Edit
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
15 Feb 2021 18:20 #198953
by db1981
Replied by db1981 on topic Ethercat HAL driver
are you able to use indraworks after the step
-Change the MasterCommunication to EtherCAT COE ,-Drive restart ?
If yes, please post an parameter file after this, before the use of twincat.
at the moment its not 100% clear for me, why twincat is necessary for PDO config.
-Change the MasterCommunication to EtherCAT COE ,-Drive restart ?
If yes, please post an parameter file after this, before the use of twincat.
at the moment its not 100% clear for me, why twincat is necessary for PDO config.
The following user(s) said Thank You: jc2ktr
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
15 Feb 2021 18:30 #198954
by jc2ktr
Yes i can use IndraworksDS after Change but i only if TwinCAT is in run state, only then i can Connect to the drive.
I will try tomorrow if i get somehow the connection to the drive without TwinCAT running, maybe it is somehow possible.
Replied by jc2ktr on topic Ethercat HAL driver
are you able to use indraworks after the step
-Change the MasterCommunication to EtherCAT COE ,-Drive restart ?
If yes, please post an parameter file after this, before the use of twincat.
at the moment its not 100% clear for me, why twincat is necessary for PDO config.
Yes i can use IndraworksDS after Change but i only if TwinCAT is in run state, only then i can Connect to the drive.
I will try tomorrow if i get somehow the connection to the drive without TwinCAT running, maybe it is somehow possible.
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
15 Feb 2021 18:44 #198956
by db1981
Replied by db1981 on topic Ethercat HAL driver
ok, don't try this will not work. Twincat sets an EoE Gateway for the ethernet communication through ethercat.
Please explain your step -Configure PDOs , are there no pdo's listet after the box scan?
Please explain your step -Configure PDOs , are there no pdo's listet after the box scan?
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
15 Feb 2021 18:54 - 15 Feb 2021 18:56 #198958
by jc2ktr
After Changing the MasterCommunication to Ethercat there are 2 pairs of PDO´s preconfigured, this is preconfigured from IndraworksDS.
see Attachments
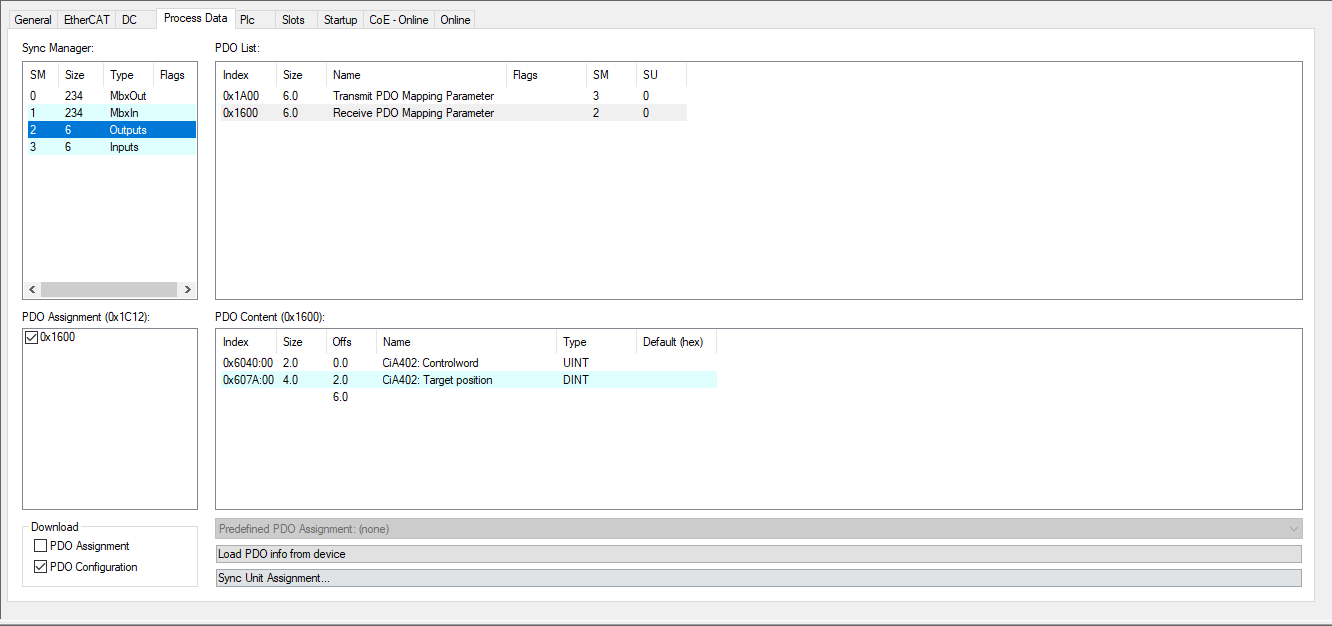
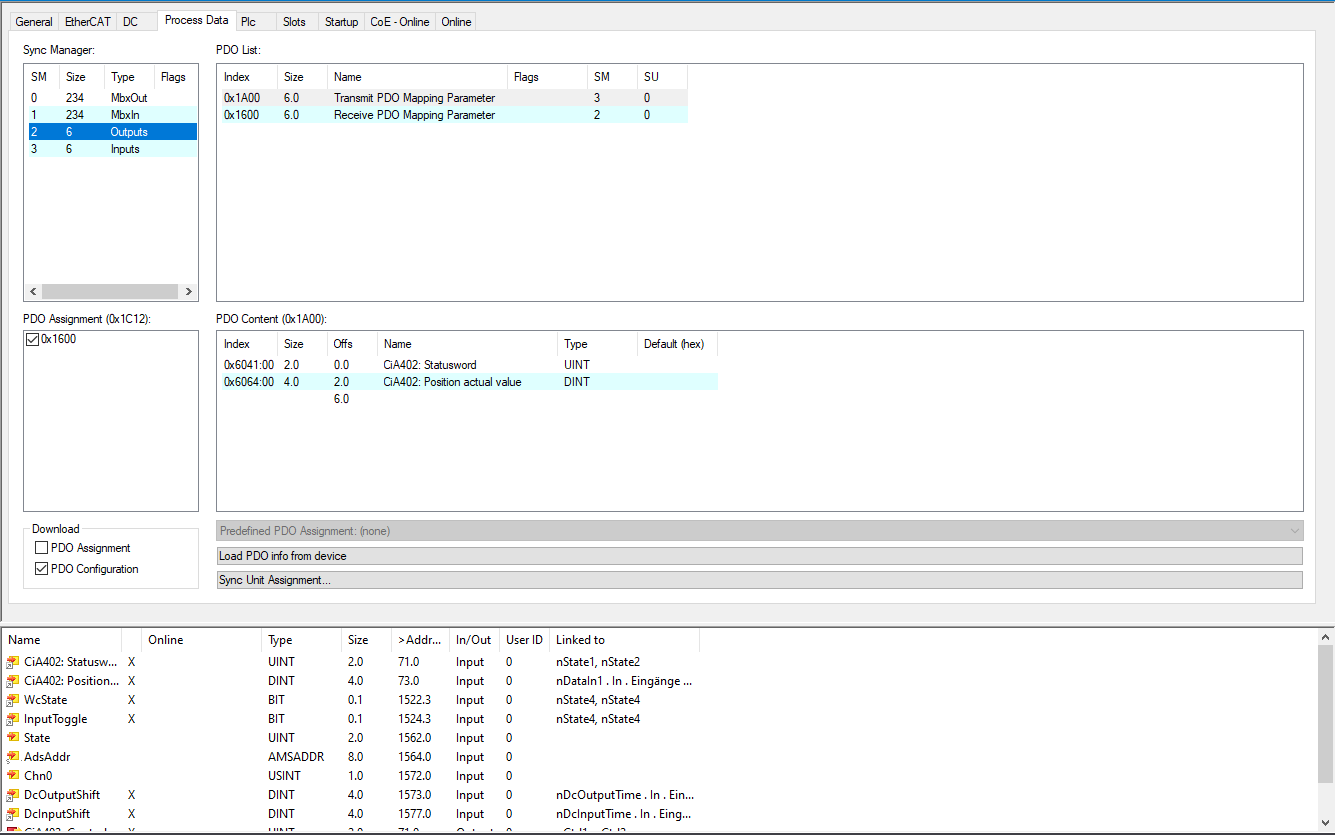
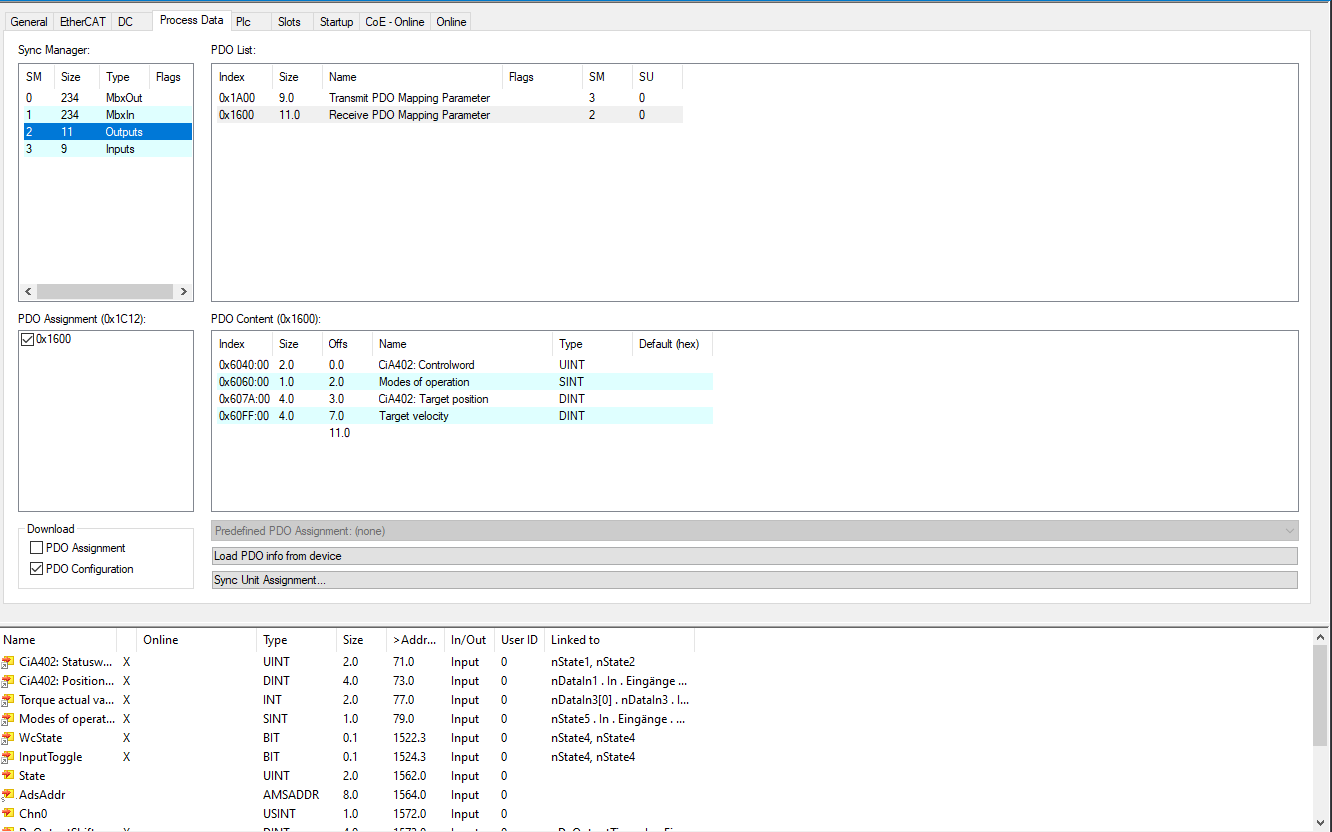
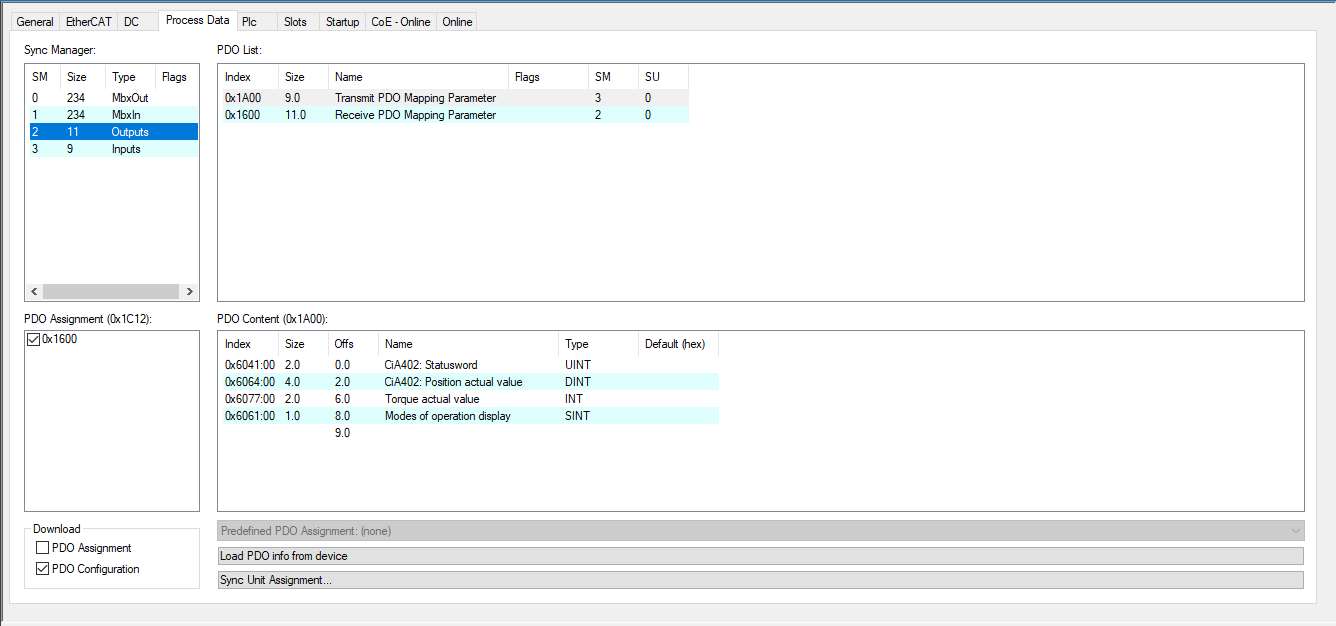
I reconfigured the PDO´s to get more options like this:
Replied by jc2ktr on topic Ethercat HAL driver
ok, don't try this will not work. Twincat sets an EoE Gateway for the ethernet communication through ethercat.
Please explain your step -Configure PDOs , are there no pdo's listet after the box scan?
After Changing the MasterCommunication to Ethercat there are 2 pairs of PDO´s preconfigured, this is preconfigured from IndraworksDS.
see Attachments
I reconfigured the PDO´s to get more options like this:
Last edit: 15 Feb 2021 18:56 by jc2ktr. Reason: Edit
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
15 Feb 2021 19:51 #198966
by db1981
Replied by db1981 on topic Ethercat HAL driver
i have added an line to your ethercat_conf.xml, please put the additional file in your machine config folder.
try to start your config without the twincat workaround.
this are the init cmds for your drive, for your desired PDO configuration. You can put them manually in your ethercat config with
an "sdo_config" line or as an external .xml file.
These commands are sent in the transition between preop and safeop state, before the master configs the pdos, goes to realtime and in op mode.
with beckhoff or sercos drives this list is very long, because it contains the whole drive configuration. These drives configurations are empty after power loose. I hope this is not so with the indradrives.
At CIA Can Profile the scaling and weigthing is handled with other units, as descriped in the indradrive manual for this firmware. but first get the drive to op without twincat, then we can get an aim at the scaling.
try to start your config without the twincat workaround.
this are the init cmds for your drive, for your desired PDO configuration. You can put them manually in your ethercat config with
an "sdo_config" line or as an external .xml file.
These commands are sent in the transition between preop and safeop state, before the master configs the pdos, goes to realtime and in op mode.
with beckhoff or sercos drives this list is very long, because it contains the whole drive configuration. These drives configurations are empty after power loose. I hope this is not so with the indradrives.
At CIA Can Profile the scaling and weigthing is handled with other units, as descriped in the indradrive manual for this firmware. but first get the drive to op without twincat, then we can get an aim at the scaling.
Attachments:
The following user(s) said Thank You: jc2ktr
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
15 Feb 2021 21:06 #198980
by jc2ktr
I know these Commands, they are listed in the startup tab from TwinCAT, i think they are stored in the drive, because i only had to use TwinCAT once to configure them.
But i did not know how to use them without TwinCAT.
Thanks i do a reset of the drive tomorrow and set it up with your additional XML and then get it hopefully to work.
Greets Sven
Replied by jc2ktr on topic Ethercat HAL driver
i have added an line to your ethercat_conf.xml, please put the additional file in your machine config folder.
try to start your config without the twincat workaround.
this are the init cmds for your drive, for your desired PDO configuration. You can put them manually in your ethercat config with
an "sdo_config" line or as an external .xml file.
These commands are sent in the transition between preop and safeop state, before the master configs the pdos, goes to realtime and in op mode.
with beckhoff or sercos drives this list is very long, because it contains the whole drive configuration. These drives configurations are empty after power loose. I hope this is not so with the indradrives.
At CIA Can Profile the scaling and weigthing is handled with other units, as descriped in the indradrive manual for this firmware. but first get the drive to op without twincat, then we can get an aim at the scaling.
I know these Commands, they are listed in the startup tab from TwinCAT, i think they are stored in the drive, because i only had to use TwinCAT once to configure them.
But i did not know how to use them without TwinCAT.
Thanks i do a reset of the drive tomorrow and set it up with your additional XML and then get it hopefully to work.
Greets Sven
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
15 Feb 2021 21:10 - 15 Feb 2021 21:10 #198982
by db1981
Replied by db1981 on topic Ethercat HAL driver
ah ok,
if you once did start the drive with Twincat, you can start it again direct with linuxcnc after an power cycle?
if you once did start the drive with Twincat, you can start it again direct with linuxcnc after an power cycle?
Last edit: 15 Feb 2021 21:10 by db1981.
Please Log in or Create an account to join the conversation.
- bkt
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1111
- Thank you received: 114
16 Feb 2021 08:56 - 16 Feb 2021 08:57 #199029
by bkt
Replied by bkt on topic Ethercat HAL driver
@bd1981 .... about your suggested xml file, you sign 607A as s32 type .... but sign it as float with scale = 10000 is the same things or really different? And why is different? .... sorry but I did not understand this thing and I would like to understand better .... some post ago you had doubts about my use of the float value and I wanted to dig deep into this aspect of linuxcnc-ethercat ...
regards
bkt
regards
bkt
Last edit: 16 Feb 2021 08:57 by bkt. Reason: error
Please Log in or Create an account to join the conversation.
Time to create page: 0.286 seconds