Ethercat HAL driver
- chimeno
- Offline
- Elite Member
-

- Posts: 295
- Thank you received: 125
I don't know if all the devices can work with the linuxcnc-ethercat version but most work.
I think that sometimes they get confused about the generic issue, one thing is the network card, which can be generic or specific, it affects somewhat the performance especially if you have many devices but I think that really with the "generic" you have enough for linuxcnc,
the other issue is the generic driver for the device, which if it does not appear in the programmed list, you can use it without knowing how to program in C, quite useful for beginners, although it is a bit difficult to understand at first.
About the automatic installation of GROITUS, I don't know how it works.
the EK1100 device is only an interface, by itself it does nothing.
About the .xml file I have never used it, I always use the device manual and the commands included in
ethercat -hGreeting
Chimeno
Please Log in or Create an account to join the conversation.
- CORBETT
-

- Offline
- Elite Member
-
- Posts: 286
- Thank you received: 113
Ok good deal, glad you got it working... Yes I would get a EL1008 or something simple for input and you can get it figured out. That would be a easy terminal to get going... and you can use it in the future.... wouldn't be wasted.
Glad Chimeno got with you on the "generic" driver as he is verse in it.
Robert
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
I have gotten the EL5101 with a HONNER 58-11141-3000 encoder, in case you need any help.
Greeting
Chimeno
Please Log in or Create an account to join the conversation.
- CORBETT
-
- Offline
- Elite Member
-
- Posts: 286
- Thank you received: 113
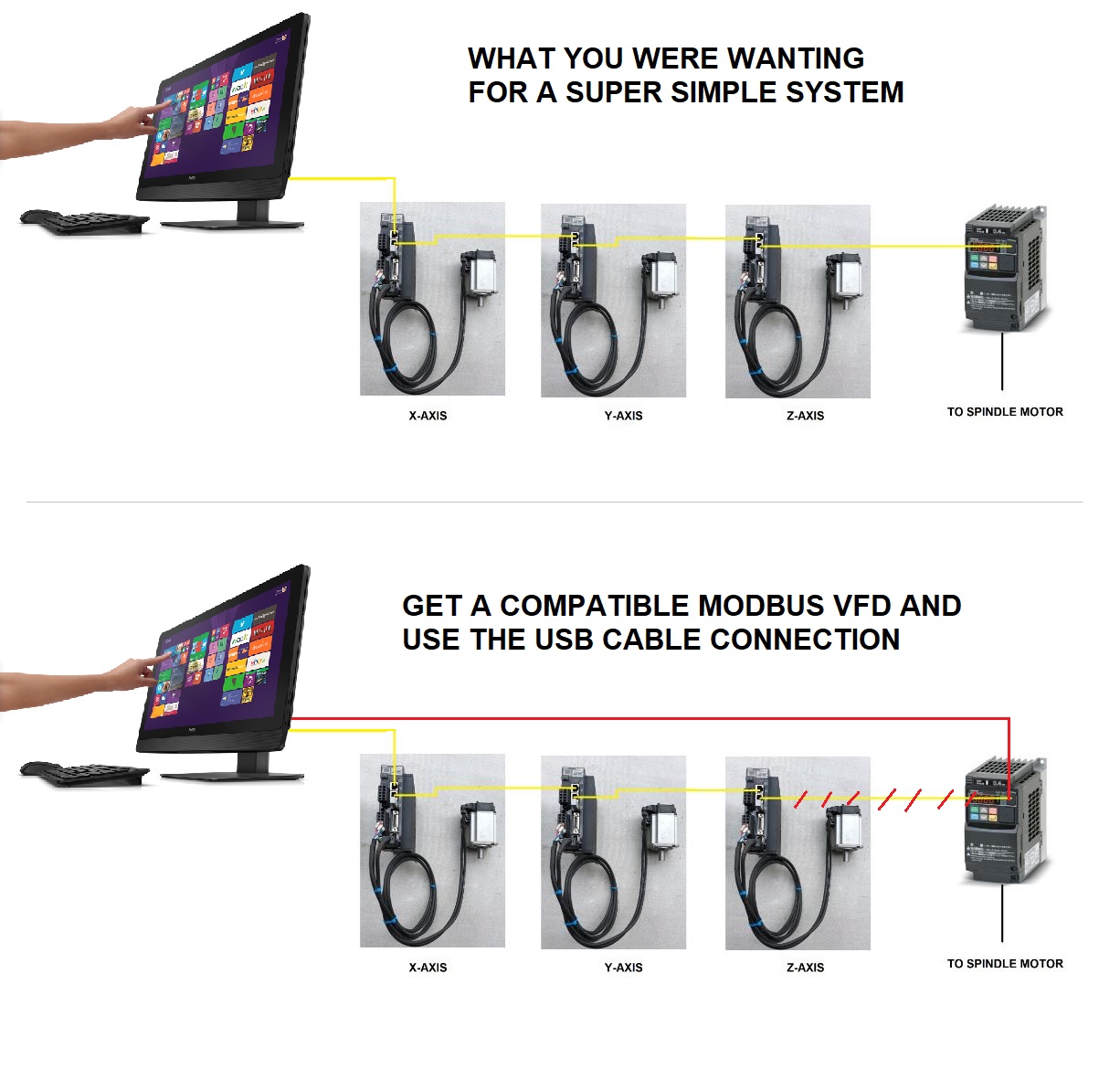
I remember you wanting to do a super simple system back a few months ago. I had put this together before the holidays, but got busy and did not put it up... but since you were back on recently wanted to share this idea.
Ok you wanted to keep it super simple with EtherCAT and the big problem was finding ECAT VFD's that are affordable. This is still not super affordable, but gives another avenue. Andy (andypugh) posted in the past about Modbus using USB. Here is the link on the forum from Andy...
forum.linuxcnc.org/10-advanced-configura...-for-vfds-etc#181516
Here is my layout for using a AIO touchscreen computer with ECAT and Modbus.. would tie the limit switches back into the amps, but only show the basic setup.
Attachments:
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-

- Posts: 87
- Thank you received: 17
I got my Servodrive up and Running and found an old description file for my firmware version.
The configuration then was relative easy. But now i stuck at running LinuxCNC with my XML file.
It stucks at line 12 with a Parse error but i can't solve it.
Hope anyone can take a short look over my File.
Greetings Sven

Hi folks,
#does someone have the original Bosch-Rexroth XML Description for TwinCAT? The one i can download from the Rexroth page does #not support the firmware of my drive. The drive is FW version 18V34 and the downloadable XML is for 20V26.
#Unfortunatley Rexroth does not have an Donwload Archive on their Website.
#And my Servomotor is not supportet by the new Firmware version.
Thanks
Please Log in or Create an account to join the conversation.
- JKAVS
- Offline
- Junior Member
-

- Posts: 22
- Thank you received: 0
I think that Modbus will be the way to go with the VFD. I definitely don't want analog control for it. The whole thing will still be much simpler than a more traditional setup.
I got an EL1008 from mail today. Next I will try to get it working.
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
not if you have already solved it, but the error is in line 11 and 13It stucks at line 12 with a Parse error but i can't solve it.
Hope anyone can take a short look over my File.
I attach the example
Error
<syncManager idx="0" dir="out"/>
</syncManager>
<syncManager idx="1" dir="in"/>
</syncManager><syncManager idx="0" dir="out">
</syncManager>
<syncManager idx="1" dir="in">
</syncManager>I think you would have to send an email to the Bosch company to see if they can send you the file.Hi folks,
#does someone have the original Bosch-Rexroth XML Description for TwinCAT? The one i can download from the Rexroth page does #not support the firmware of my drive. The drive is FW version 18V34 and the downloadable XML is for 20V26.
#Unfortunatley Rexroth does not have an Donwload Archive on their Website.
#And my Servomotor is not supportet by the new Firmware version.
Hello @CORBETT
You can also use some servo motor controllers that allow you to configure an asynchronous motor.
Greeting Chimeno
Please Log in or Create an account to join the conversation.
- JKAVS
- Offline
- Junior Member
-
- Posts: 22
- Thank you received: 0
Probably the hardest part follows next. I'm planning to use Leadshine servo drives which don't have drivers yet. Apparently the generic driver is not fast enough for servo drives so I'd have to write actual driver. Is there more information about it somewhere in this thread?
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-

- Posts: 790
- Thank you received: 276
What do you mean with "Apparently the generic driver is not fast enough for servo drives" ?
Its as fast as your servo period/ethercat app cycle time.
Please Log in or Create an account to join the conversation.
- JKAVS
- Offline
- Junior Member
-
- Posts: 22
- Thank you received: 0
I have read so from this thread.
Please Log in or Create an account to join the conversation.