Ethercat HAL driver
- jc2ktr
- Offline
- Premium Member
-

Less
More
- Posts: 87
- Thank you received: 17
21 Dec 2020 17:00 #192671
by jc2ktr
Replied by jc2ktr on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
@Chimeno,
THANKS for your really great help")
What do you mean with TXPDO1 & RXPDO1?
THANKS for your really great help
You have different settings and you have to enable one, for example number 1 why are you using the TXPDO1 and RXPDO1 registers
What do you mean with TXPDO1 & RXPDO1?
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-

Less
More
- Posts: 295
- Thank you received: 125
21 Dec 2020 19:48 #192689
by chimeno
Replied by chimeno on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
Hello @jc2ktr
I mean that you are using the registration
It is also available if you want to change the preconfigured configuration in the driver, that is, you can have in configuration 1 position mode and in configuration 2 the speed mode, then with a simple pin you can change the way the driver works
I hope I have explained myself clearly.
Greeting
Chimeno
I mean that you are using the registration
TXPDO1 = 1A00
RXPDO1 = 1600It is also available if you want to change the preconfigured configuration in the driver, that is, you can have in configuration 1 position mode and in configuration 2 the speed mode, then with a simple pin you can change the way the driver works
TXPDO2 = 1A01
RXDO2 = 1601
TXPDO3 = 1A02
RXPDO = 1602I hope I have explained myself clearly.
Greeting
Chimeno
The following user(s) said Thank You: jc2ktr
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
21 Dec 2020 20:40 - 21 Dec 2020 20:41 #192698
by jc2ktr
Hi @ Chimeno,
yes your explanation is more than clear now
i use RX/TXPDO1 because i want to use the 0x6060 Bit 8 "Cyclic Dynamic Position Mode (CSP)" though i don´t really know if its the right config for it. Because i don´t get the Motor to move in LinuxCNC by now.
The Manual says following:
2.4.4 CSP Sync Location Mode
Synchronized location mode description
In this mode, the primary controller generates a position trace and sends the target
location (0x607A) to the drive during each PDO update cycle. The drive feeds back the
actual motor position and optional actual motor speed and torque.
Enable CSP mode
To enable the circular synchronization location mode, the value 0008h must be written to 6060 h at the dictionary address. This is what i do in my custom_postgui.hal with my: setp lcec.0.7.opmode 8
Enable Drive
When powered on, the drive is in a non-enabled state. The control word 6040h is written
to 0006h, which will put the drive into the "ready to switch on" state. Once again, write
the value of 0x000F to 6040h, the drive will be in the enabling state, the motor can
respond to the CSP instructions.
This is where i am stuck a little. when i Enable my machine i set the Pins/Signals:
net x-enable lcec.0.7.X-cmd-EnableVoltage
lcec.0.7.X-cmd-EnableOperation
lcec.0.7.X-cmd-SwitchOn
lcec.0.7.X-cmd-/QuickStop <= joint.0.amp-enable-out
The Drive is then enabled and the motor shaft locked, but when i try to jog it won´t move, even if a changing setvalue on lcec.0.7.poscmd is there.
Replied by jc2ktr on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
Hello @jc2ktr
I mean that you are using the registration
TXPDO1 = 1A00 RXPDO1 = 1600
It is also available if you want to change the preconfigured configuration in the driver, that is, you can have in configuration 1 position mode and in configuration 2 the speed mode, then with a simple pin you can change the way the driver works
TXPDO2 = 1A01 RXDO2 = 1601 TXPDO3 = 1A02 RXPDO = 1602
I hope I have explained myself clearly.
Greeting
Chimeno
Hi @ Chimeno,
yes your explanation is more than clear now
i use RX/TXPDO1 because i want to use the 0x6060 Bit 8 "Cyclic Dynamic Position Mode (CSP)" though i don´t really know if its the right config for it. Because i don´t get the Motor to move in LinuxCNC by now.
The Manual says following:
2.4.4 CSP Sync Location Mode
Synchronized location mode description
In this mode, the primary controller generates a position trace and sends the target
location (0x607A) to the drive during each PDO update cycle. The drive feeds back the
actual motor position and optional actual motor speed and torque.
Enable CSP mode
To enable the circular synchronization location mode, the value 0008h must be written to 6060 h at the dictionary address. This is what i do in my custom_postgui.hal with my: setp lcec.0.7.opmode 8
Enable Drive
When powered on, the drive is in a non-enabled state. The control word 6040h is written
to 0006h, which will put the drive into the "ready to switch on" state. Once again, write
the value of 0x000F to 6040h, the drive will be in the enabling state, the motor can
respond to the CSP instructions.
This is where i am stuck a little. when i Enable my machine i set the Pins/Signals:
net x-enable lcec.0.7.X-cmd-EnableVoltage
lcec.0.7.X-cmd-EnableOperation
lcec.0.7.X-cmd-SwitchOn
lcec.0.7.X-cmd-/QuickStop <= joint.0.amp-enable-out
The Drive is then enabled and the motor shaft locked, but when i try to jog it won´t move, even if a changing setvalue on lcec.0.7.poscmd is there.
Last edit: 21 Dec 2020 20:41 by jc2ktr. Reason: edit
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
21 Dec 2020 20:52 #192700
by chimeno
Replied by chimeno on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
Hello @jc2ktr
have if we get it, try this.
Greeting
Chimeno
have if we get it, try this.
net x-enable joint.0.amp-enable-out lcec.0.7.X-cmd-SwitchOn
net x-enable lcec.0.7.X-cmd-EnableOperation
net estop-out lcec.0.7.X-cmd-QuickStop
net estop-out lcec.0.7.X-cmd-QuickStop
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-inGreeting
Chimeno
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
21 Dec 2020 20:56 - 22 Dec 2020 14:33 #192702
by jc2ktr
Thanks a lot @Chimeno,
i will try it tomorrow, because my LinuxCNC EtherCAT testbench is in my Office/Workshop
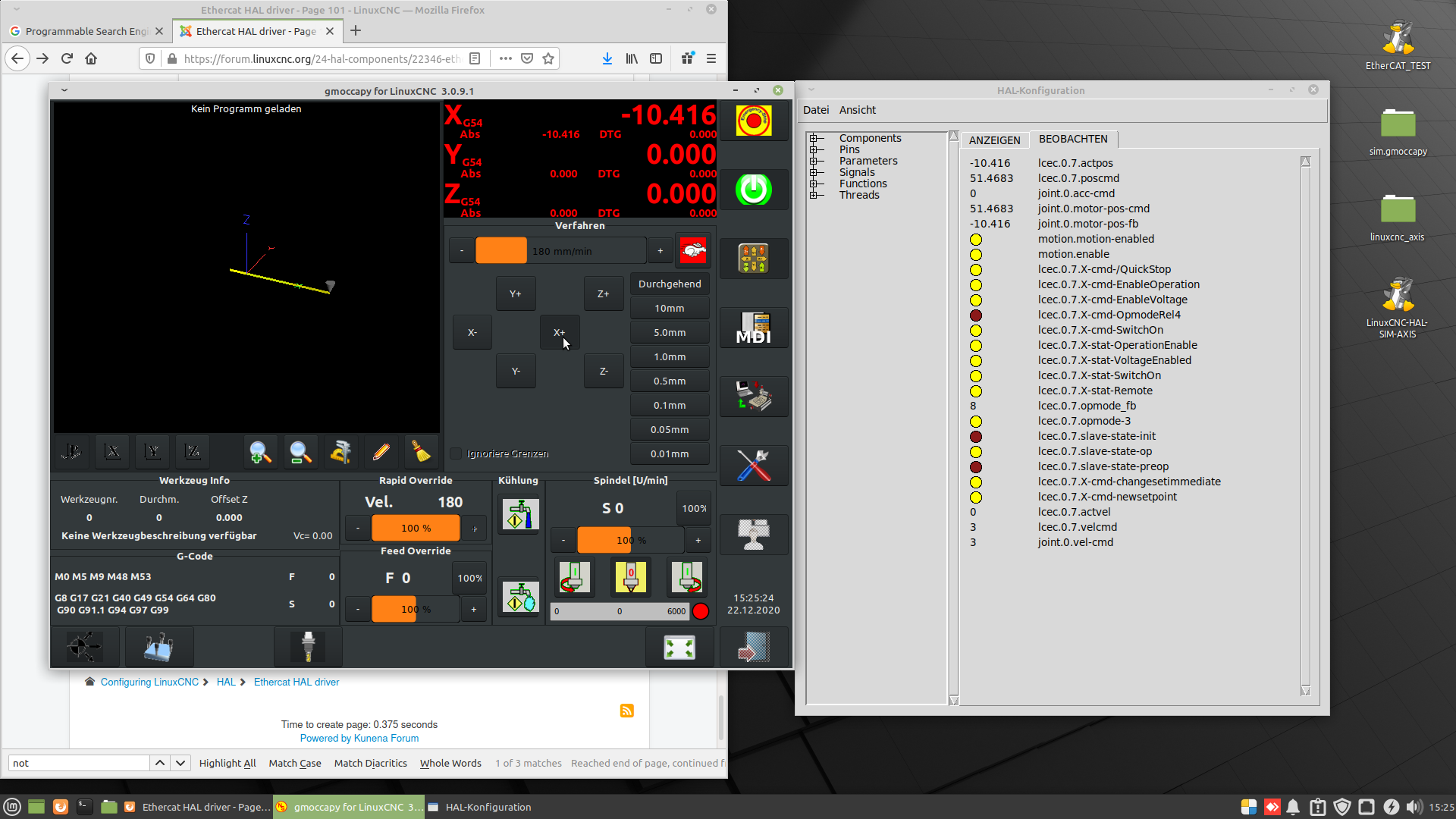
12/22/2020 another day, i changed the signals as above but, problem is still the same, the drive is enabled, and in OP mode but my drive moves not. even if a target position and velocity signal is send to the Drive, i changed my XML further like the one from @MRBaird, when i jog the Axis the commands are sent but no movement occurs. i added a Image where the halshow is online.
Replied by jc2ktr on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
Hello @jc2ktr
have if we get it, try this.
net x-enable joint.0.amp-enable-out lcec.0.7.X-cmd-SwitchOn net x-enable lcec.0.7.X-cmd-EnableOperation net estop-out lcec.0.7.X-cmd-QuickStop net estop-out lcec.0.7.X-cmd-QuickStop net estop-out <= iocontrol.0.user-enable-out net estop-out => iocontrol.0.emc-enable-in
Greeting
Chimeno
Thanks a lot @Chimeno,
i will try it tomorrow, because my LinuxCNC EtherCAT testbench is in my Office/Workshop
12/22/2020 another day, i changed the signals as above but, problem is still the same, the drive is enabled, and in OP mode but my drive moves not. even if a target position and velocity signal is send to the Drive, i changed my XML further like the one from @MRBaird, when i jog the Axis the commands are sent but no movement occurs. i added a Image where the halshow is online.
Attachments:
Last edit: 22 Dec 2020 14:33 by jc2ktr. Reason: Image added
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
22 Dec 2020 19:46 #192853
by chimeno
Replied by chimeno on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
Hello @jc2ktr
I'm sure it's silly, I can't think of anything myself, you can publish your .hal files and I'll take a look at it
Greeting
Chimeno
I'm sure it's silly, I can't think of anything myself, you can publish your .hal files and I'll take a look at it
Greeting
Chimeno
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
23 Dec 2020 12:48 #192956
by jc2ktr
@Chimeno
i think it's can't be that big mistake, but i don't see it / get it what the problem is. My complete config is attached.
The Gui starts and the mapped IO's are shown in HAL-Show, and the drive can be enabled but will not move.
Greetings Sven
Replied by jc2ktr on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
Hello @jc2ktr
I'm sure it's silly, I can't think of anything myself, you can publish your .hal files and I'll take a look at it
Greeting
Chimeno
@Chimeno
i think it's can't be that big mistake, but i don't see it / get it what the problem is. My complete config is attached.
The Gui starts and the mapped IO's are shown in HAL-Show, and the drive can be enabled but will not move.
Greetings Sven
Attachments:
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
23 Dec 2020 20:01 #193012
by chimeno
Replied by chimeno on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
Hello @jc2ktr,
I can't find the configuration signals?
Greeting
Chimeno
I can't find the configuration signals?
setp lcec.0.7.opmode 8
setp lcec.0.7.X-cmd-OPmodeRel1 1Greeting
Chimeno
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
23 Dec 2020 20:11 - 23 Dec 2020 20:36 #193014
by jc2ktr
The lcec.0.7.opmode 8 is set in the custom_postgui.hal under only under another name setp lcec.0.7.opmode-3 true
its defined in the ethercat.xml <pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="bit"/>
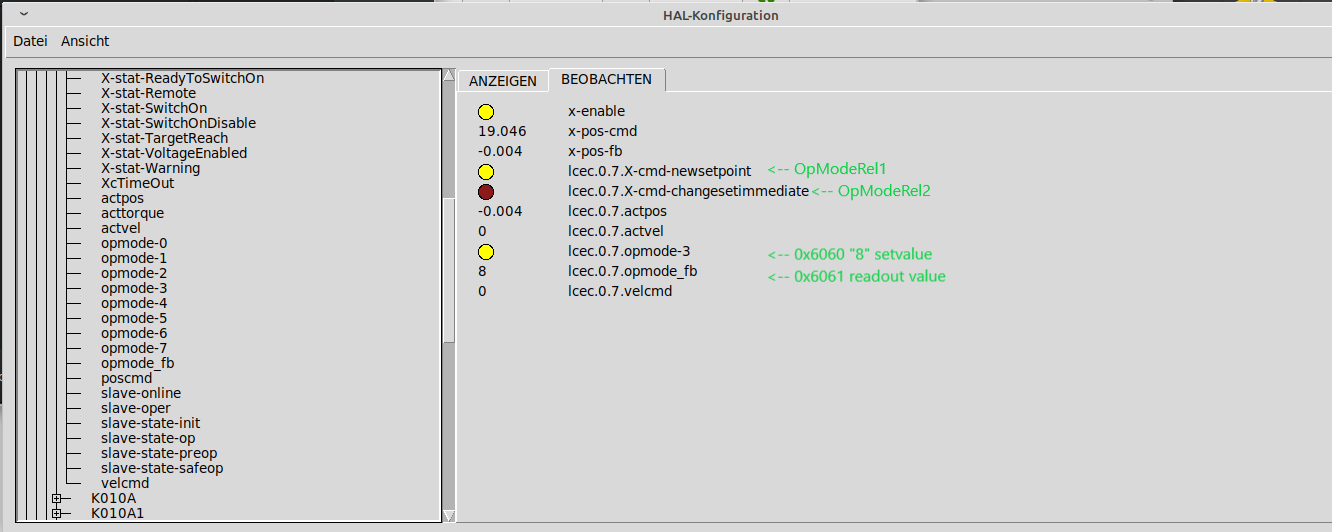
the other one i must have missed in my config, though i dont really know what it does at the moment.
addition
the setp lcec.0.7.X-cmd-OPmodeRel1 1 < i have renamed it as i added some changes from MRBaird
addition 2
is it possible that the drive does not move because the joint.0.acc-cmd does not change its state it remains allways 0 when i jog the axis
Replied by jc2ktr on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
Hello @jc2ktr,
I can't find the configuration signals?
setp lcec.0.7.opmode 8 setp lcec.0.7.X-cmd-OPmodeRel1 1
Greeting
Chimeno
The lcec.0.7.opmode 8 is set in the custom_postgui.hal under only under another name setp lcec.0.7.opmode-3 true
its defined in the ethercat.xml <pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="bit"/>
the other one i must have missed in my config, though i dont really know what it does at the moment.
addition
the setp lcec.0.7.X-cmd-OPmodeRel1 1 < i have renamed it as i added some changes from MRBaird
addition 2
is it possible that the drive does not move because the joint.0.acc-cmd does not change its state it remains allways 0 when i jog the axis
Attachments:
Last edit: 23 Dec 2020 20:36 by jc2ktr. Reason: picture added
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
23 Dec 2020 20:35 #193018
by chimeno
Replied by chimeno on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
Hello @jc2ktr
Ok, I don't know what else to tell you, check that the engine moves with TWINCAT3 and check the status that is the same in linuxcnc, you will have to ask for help from the colleague @MRBaird that he does have the drivers and can help you
Greeting
Chimeno
Ok, I don't know what else to tell you, check that the engine moves with TWINCAT3 and check the status that is the same in linuxcnc, you will have to ask for help from the colleague @MRBaird that he does have the drivers and can help you
Greeting
Chimeno
The following user(s) said Thank You: jc2ktr
Please Log in or Create an account to join the conversation.
Time to create page: 0.859 seconds