Ethercat HAL driver
- JanMrlth
-

- Offline
- New Member
-

- Posts: 5
- Thank you received: 5
One Question:
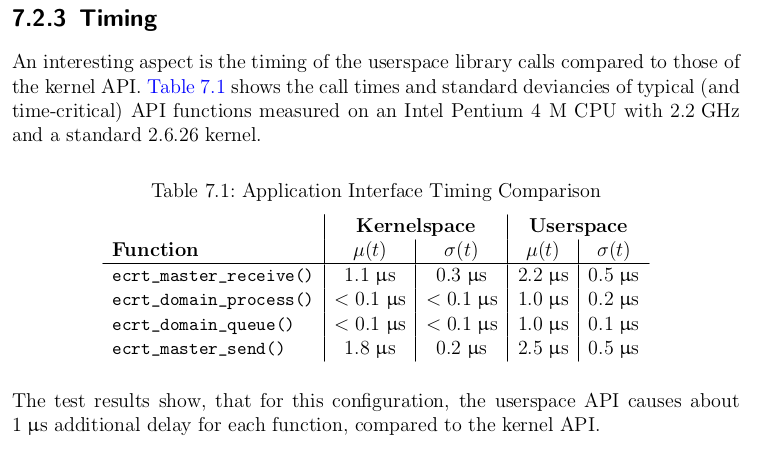
www.etherlab.org/download/ethercat/ethercat-1.5.2.pdf say on page 23:
It is not possible to use [the generic driver] in-kernel realtime extensions like RTAI with the generic driver, because the network stack code uses dynamic memory allocations and other things, that could cause the system to freeze in realtime context.
Do I need a 'real' driver to be able to run a axis in real time? How much slower is the generic driver?
Please Log in or Create an account to join the conversation.
- Grotius
-

- Offline
- Platinum Member
-

- Posts: 2419
- Thank you received: 2348
I remember a document where the timing details where provided.
You see, it's almost equal between userspace and kernelspace.
It's true you can not mix rtai (.ko) with the generic (.so) driver.
How much slower is the generic driver?
I think it's 2-5 nanosec slower if you take the 4 ecrt steps together.
Please Log in or Create an account to join the conversation.
- tetw
- Offline
- New Member
-
- Posts: 6
- Thank you received: 0
uname -a
Linux PcLcnc 4.9.0-8-rt-686-pae #1 SMP PREEMPT RT Debian 4.9.110-3+deb9u6 (2018-10-08) i686 GNU/LinuxFailed to register PDO entry: No such file or directory
LCEC: master 0 PDO entry registration failed
lcec: rtapi_app_main: Invalid argument (-22)
/home/operatore/Scrivania/prova.hal:4: waitpid failed /usr/bin/rtapi_app lcec
/home/operatore/Scrivania/prova.hal:4: /usr/bin/rtapi_app exited without becoming ready
/home/operatore/Scrivania/prova.hal:4: insmod for lcec failed, returned -1dmesg | egrep EtherCAT
[ 10.362827] EtherCAT: Master driver 1.5.2 unknown
[ 10.363074] EtherCAT: 1 master waiting for devices.
[ 10.369886] ec_generic: EtherCAT master generic Ethernet device module 1.5.2 unknown
[ 10.369912] EtherCAT: Accepting 00:A0:D2:A5:C0:73 as main device for master 0.
[ 10.380067] EtherCAT 0: Starting EtherCAT-IDLE thread.
[ 10.380162] EtherCAT 0: Link state of ecm0 changed to UP.
[ 10.389778] EtherCAT WARNING 0: 1 datagram TIMED OUT!
[ 11.391141] EtherCAT WARNING 0: 124 datagrams TIMED OUT!
[ 12.393481] EtherCAT WARNING 0: 125 datagrams TIMED OUT!
[ 13.392298] EtherCAT WARNING 0: 123 datagrams TIMED OUT!
[ 14.393714] EtherCAT WARNING 0: 125 datagrams TIMED OUT!
[ 15.328642] EtherCAT 0: Link state of ecm0 changed to DOWN.
[ 1240.392727] EtherCAT: Requesting master 0...
[ 1240.392737] EtherCAT: Successfully requested master 0.
[ 1240.393919] EtherCAT ERROR 0 0:1: PDO entry 0x6000:01 is not mapped.
[ 1240.394471] EtherCAT 0: Releasing master...
[ 1240.394500] EtherCAT 0: Released.
[ 1810.942216] EtherCAT: Requesting master 0...
[ 1810.942224] EtherCAT: Successfully requested master 0.
[ 1810.948244] EtherCAT ERROR 0 0:1: PDO entry 0x6000:01 is not mapped.
[ 1810.949304] EtherCAT 0: Releasing master...
[ 1810.949378] EtherCAT 0: Released.I have'n found a solution for upload "PDO 0x6000"
Another inaccuracy when I execute the command
ethrecat slave
0 0:0 PREOP + EK1100 EtherCAT-Koppler (2A E-Bus)
1 0:1 PREOP + EL1104 4K. Dig. Eingang 24V, 3ms, Sensorversorgung
2 0:2 PREOP + EL1104 4K. Dig. Eingang 24V, 3ms, Sensorversorgung
3 0:3 PREOP + EL1104 4K. Dig. Eingang 24V, 3ms, Sensorversorgung
4 0:4 PREOP + EL1104 4K. Dig. Eingang 24V, 3ms, Sensorversorgung
5 0:5 PREOP + EL1104 4K. Dig. Eingang 24V, 3ms, Sensorversorgung
6 0:6 PREOP + EL1104 4K. Dig. Eingang 24V, 3ms, Sensorversorgung
7 0:7 PREOP + EL1104 4K. Dig. Eingang 24V, 3ms, Sensorversorgung
8 0:8 PREOP + EL1104 4K. Dig. Eingang 24V, 3ms, Sensorversorgung
9 0:9 PREOP + EL3142 2K. Ana. Eingang 0-20mA
10 0:10 PREOP + EL4132 2Ch. Ana. Ausgang +/-10V, 16bit
11 0:11 PREOP + EL9410 E-Bus Netzteilklemme (Diagnose)
12 0:12 PREOP + EL2004 4K. Dig. Ausgang 24V, 0.5A
13 0:13 PREOP + EL2004 4K. Dig. Ausgang 24V, 0.5A
14 0:14 PREOP + EL2004 4K. Dig. Ausgang 24V, 0.5A
15 0:15 PREOP + EL2004 4K. Dig. Ausgang 24V, 0.5A
16 0:16 PREOP + EL2004 4K. Dig. Ausgang 24V, 0.5A
17 0:17 PREOP + EL2004 4K. Dig. Ausgang 24V, 0.5A
18 0:18 PREOP + EL2004 4K. Dig. Ausgang 24V, 0.5A
19 0:19 PREOP + EL2004 4K. Dig. Ausgang 24V, 0.5A
20 0:20 PREOP + Infranor Xtrapuls v2.2 (CoE)
21 0:21 PREOP + Infranor Xtrapuls v2.2 (CoE)
22 0:22 PREOP + Infranor Xtrapuls v2.2 (CoE)
23 0:23 PREOP + Infranor Xtrapuls v2.2 (CoE)
24 0:24 PREOP + Infranor Xtrapuls v2.2 (CoE)
25 0:25 PREOP + Infranor Xtrapuls v2.2 (CoE)
26 0:26 PREOP + Infranor Xtrapuls v2.2 (CoE)Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
Did you succeed to load and run a simple config like the EK1100 only?
Bustime in xml file : 1000000 is ok.
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-

- Posts: 87
- Thank you received: 17
i managed to get LinuxCNC with ethercat driver up and Running thanks to Grotius.
Is there anywhere a Tutorial how to add Ethercat devices. I have an RTelligent Ethercat (COE) Capable ECT60 Stepper Driver with the Corresponding .XML file. And a Beckhoff EP2316-0008 8 INPUTS / 8 Outputs. How should the ethercat_conf.XML look to get the drive/io module usable.
I have tried to make the XML with the tutorial for the IndraDrives from the LinuxCNC wiki:
indraDrive tutorial
If I do a ethercat slaves in Terminal it writes following output:
0 0:0 PREOP + ECT60(COE)
1 0:1 PREOP + EP2316-0008 8 K. Dig. Ein, 10�s, 8 K. Dig. Aus 24V, 0,5A, Diagn
Attachments:
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
Is there anywhere a Tutorial how to add Ethercat devices.
No not really.
To all users.

It is time to write an application that writes the xml file automaticly for the lcec driver.
This will save everyone over here lot's of time. For a few, it can saves weeks.
I mention in general, that the application's at linuxcnc are becoming more complex and advanched over time.
I have experience with reading and writing xml files in c++. It's really easy to do that.
But i need help from you guy's to make the software details.
Who is for making the software and can help provide the ethercat info for the different servo drives?
I have non experience with twincat. Otherwise maybe i had the logic to write some code, but now it's that we can let the software
do a terminal command, then retrieve a slave list. At that moment we have to generate the xml file.
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
I have seen your video on Youtube. Nice work. Quite complex to understand the ethercat bus.
Please Log in or Create an account to join the conversation.
- Nico2017
- Offline
- Premium Member
-
- Posts: 153
- Thank you received: 26
I agree with you that the parametrization of the EtherCAT xml file for linuxcnc EtherCAT driver can be a hard task.
I believe you can get a lot (all) of information from the ESI file (xml format) usually provided by manufacturers at request and also by the use of TwinCAT to read those EtherCAT parameters. But I believe that TwinCAT is actually looking into those ESI file to get a default configuration, more precisely if you are using TwinCAT offline not connected to any physical slave and simulate an EtherCAT master - slaves topology.
Some motor drives or slaves will need to be configured via the manufacturer software/application to configure the EtherCAT communication (inputs outputs and so on). Once parametrized you could use TwinCAT to connect yourself to the slave and identify the different informations. Then you have to convert it into usable information for the linuxcnc EtherCAT .xml file.
You could also use the EtherCAT commands to identify all pdos directly.
Nicolas
Please Log in or Create an account to join the conversation.
- tetw
- Offline
- New Member
-
- Posts: 6
- Thank you received: 0
Hi Grotius,Hi Tetw,
Did you succeed to load and run a simple config like the EK1100 only?
Bustime in xml file : 1000000 is ok.
I know things have changed I don't know why, but it only works with “EK1100” even by changing the parameter “appTimePeriod” together with the thread of the hal file, I tried to unplug the result does not change.
dmesg | egrep EtherCAT
[ 10.316518] EtherCAT: Master driver 1.5.2 unknown
[ 10.316767] EtherCAT: 1 master waiting for devices.
[ 10.325681] ec_generic: EtherCAT master generic Ethernet device module 1.5.2 unknown
[ 10.325708] EtherCAT: Accepting 00:A0:D2:A5:C0:73 as main device for master 0.
[ 10.336070] EtherCAT 0: Starting EtherCAT-IDLE thread.
[ 10.336161] EtherCAT 0: Link state of ecm0 changed to UP.
[ 10.345732] EtherCAT WARNING 0: 1 datagram TIMED OUT!
[ 11.350801] EtherCAT WARNING 0: 125 datagrams TIMED OUT!
[ 12.354137] EtherCAT WARNING 0: 125 datagrams TIMED OUT!
[ 13.358682] EtherCAT WARNING 0: 121 datagrams TIMED OUT!
[ 14.151273] EtherCAT 0: Link state of ecm0 changed to DOWN.
[ 80.361852] EtherCAT: Requesting master 0...
[ 80.361861] EtherCAT: Successfully requested master 0.
[ 80.361899] EtherCAT 0: Domain0: Logical address 0x00000000, 0 byte, expected working counter 0.
[ 80.363775] EtherCAT 0: Master thread exited.
[ 80.363780] EtherCAT 0: Starting EtherCAT-OP thread.
[ 80.369196] EtherCAT WARNING 0: 97 datagrams TIMED OUT!
[ 80.397692] EtherCAT 0: Master thread exited.
[ 80.397706] EtherCAT 0: Starting EtherCAT-IDLE thread.
[ 80.397810] EtherCAT 0: Releasing master...
[ 80.397815] EtherCAT 0: Released.
[ 80.625045] EtherCAT WARNING: Datagram f6a2e250 (master-fsm) was SKIPPED 1 time.
[ 94.471306] EtherCAT: Requesting master 0...
[ 94.471315] EtherCAT: Successfully requested master 0.
[ 94.471382] EtherCAT ERROR 0 0:1: PDO entry 0x6000:01 is not mapped.
[ 94.471965] EtherCAT 0: Releasing master...
[ 94.471977] EtherCAT 0: Released.Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
The bus is trying to connect to mac adres : 00:A0:D2:A5:C0:73
Look if you have the correct mac adres in your ethercat config file. $ ip addr show
I am not sure it's working correct.
Your output : ERROR 0 0:1: PDO entry 0x6000:01 is not mapped. Someone has a similar problem here :
etherlab-dev.etherlab.narkive.com/bqcnVQ...030-01-is-not-mapped
What does this command tell you : $ ethercat cstruct
Please Log in or Create an account to join the conversation.