Ethercat HAL driver
- Grotius
-

- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
20 Nov 2020 17:07 #189898
by Grotius
Replied by Grotius on topic Ethercat HAL driver
The following user(s) said Thank You: Nico2017
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-

Less
More
- Posts: 295
- Thank you received: 125
20 Nov 2020 20:30 - 20 Nov 2020 20:35 #189920
by chimeno
Replied by chimeno on topic Ethercat HAL driver
Hello @jc2ktr
I don't have that controller but you basically have
enable these pins:
pin connected:I hope this can put you on your way
Hello @tetw
you have an error in some PDO or device configuration, can you attach the configuration file .xml I take a look?
Greeting
Chimeno
I don't have that controller but you basically have
enable these pins:
Switch ON
Enable Voltage
Enable Operationpin connected:
Actual Position => joint.0.motor-pos-fb
ProfileTargetPosition <= joint.0.motor-pos-cmdHello @tetw
you have an error in some PDO or device configuration, can you attach the configuration file .xml I take a look?
Greeting
Chimeno
Last edit: 20 Nov 2020 20:35 by chimeno. Reason: Edit
Please Log in or Create an account to join the conversation.
- JanMrlth
-

- Offline
- New Member
-

Less
More
- Posts: 5
- Thank you received: 5
21 Nov 2020 03:24 - 21 Nov 2020 03:27 #189946
by JanMrlth
Do you have some links on this topic?
Since Grotius' image worked fine out of the box, I did not look in to alternative drivers.
What are 'many' devices? A cnc mill usually comes with 3 axis and a few IOs.
I am in contact with Beckhoff for the 7041-1000 configuration at the moment. If someone has additional documentation on the Config of this card, please let me know.
Replied by JanMrlth on topic Ethercat HAL driver
In my experience, the generic driver works very well if you have few connected devices, enough if they are in free mode and if it is in SYNC0 mode, nothing happens if a cycle is lost because the next cycle I will read the data again, but if you have many devices and you use the SYNC0 and SYNC1 mode, I advise you to use the e1000e controller, the configuration of the devices is much faster and you have no loss of synchronism.
Do you have some links on this topic?
Since Grotius' image worked fine out of the box, I did not look in to alternative drivers.
What are 'many' devices? A cnc mill usually comes with 3 axis and a few IOs.
I am in contact with Beckhoff for the 7041-1000 configuration at the moment. If someone has additional documentation on the Config of this card, please let me know.
Last edit: 21 Nov 2020 03:27 by JanMrlth.
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
21 Nov 2020 09:31 - 21 Nov 2020 09:35 #189966
by Grotius
Replied by Grotius on topic Ethercat HAL driver
@Jan,
Don't buy the 7041 or 7041-1000. I tested both version's. They work but the output power is very low. In my opinion only suitable
for a 3d printer. This is a product for companies like asml.
Also the max output speed is not what i was expecting. They cost too much => ROI.
What i like the most is a :
EL2124 + (for example the dm860) stepper driver. This works really amazing. I have config files for this available.
What you could do, and i also advice if you want to do some research. Buy one chineze ethercat stepper driver and bring this to live with linuxcnc and share your experiences.
Don't buy the 7041 or 7041-1000. I tested both version's. They work but the output power is very low. In my opinion only suitable
for a 3d printer. This is a product for companies like asml.
Also the max output speed is not what i was expecting. They cost too much => ROI.
What i like the most is a :
EL2124 + (for example the dm860) stepper driver. This works really amazing. I have config files for this available.
What you could do, and i also advice if you want to do some research. Buy one chineze ethercat stepper driver and bring this to live with linuxcnc and share your experiences.
Last edit: 21 Nov 2020 09:35 by Grotius.
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
21 Nov 2020 14:52 - 21 Nov 2020 14:53 #189975
by chimeno
Replied by chimeno on topic Ethercat HAL driver
Hello @JanMrlth
Right now I do not have any links for practical applications, many devices such as 50, although I have 43 devices connected in generic mode without problems using the PLL patch, now I want to switch to the e1000e controller. The generic driver works for all network cards, for example to use the e1000e driver you need a card with the specific intel chip, never used El7041 although it should not be difficult, if you have the manual and TWINCAT easy to configure.
Greeting
Chimeno
Right now I do not have any links for practical applications, many devices such as 50, although I have 43 devices connected in generic mode without problems using the PLL patch, now I want to switch to the e1000e controller. The generic driver works for all network cards, for example to use the e1000e driver you need a card with the specific intel chip, never used El7041 although it should not be difficult, if you have the manual and TWINCAT easy to configure.
Greeting
Chimeno
Last edit: 21 Nov 2020 14:53 by chimeno.
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
21 Nov 2020 15:21 - 21 Nov 2020 17:47 #189977
by Grotius
Replied by Grotius on topic Ethercat HAL driver
Attached my EL7041 configuration files that worked for me.
The lcec driver has already the EL7041 inside on the grotius iso.
@Chimeno,
I have 43 devices connected in generic mode without problems using the PLL patch,
Including your wife?
The lcec driver has already the EL7041 inside on the grotius iso.
@Chimeno,
I have 43 devices connected in generic mode without problems using the PLL patch,
Including your wife?
Last edit: 21 Nov 2020 17:47 by Grotius.
The following user(s) said Thank You: chimeno, jc2ktr
Please Log in or Create an account to join the conversation.
- Tomi
-

- Offline
- New Member
-
Less
More
- Posts: 1
- Thank you received: 0
23 Nov 2020 01:56 #190091
by Tomi
Replied by Tomi on topic Ethercat HAL generic on raspberry 4 rt (working with beckhoff)
Thank You thesade,
I Succeeded install etherlab on top of current linuxcnc raspberry pi image to rpi4. I started ethercat and bus starts to blink fast with EK1100.
I also installed Beremiz to same image. And CanFestival. I am using cheap isolated 2-channel can hat from aliexpress (2-Channel Isolated CAN Expansion HAT,for Raspberry Pi,MCP2515 + SN65HVD230). I configured first channel to master and second to slave. Bus jumpered with wire. CanOpen bus starts communicate. There are some new cheap integrated ethercat AC-servomotor US $134.19, es in aliexpress. Also CanOpen models seems to be available even cheaper. I noticed that ethercat have been tested for Openplcproject with RPI also. All information and developers are separated and working with same problems without idea that someone is making just same thing elsewhere.
I Succeeded install etherlab on top of current linuxcnc raspberry pi image to rpi4. I started ethercat and bus starts to blink fast with EK1100.
I also installed Beremiz to same image. And CanFestival. I am using cheap isolated 2-channel can hat from aliexpress (2-Channel Isolated CAN Expansion HAT,for Raspberry Pi,MCP2515 + SN65HVD230). I configured first channel to master and second to slave. Bus jumpered with wire. CanOpen bus starts communicate. There are some new cheap integrated ethercat AC-servomotor US $134.19, es in aliexpress. Also CanOpen models seems to be available even cheaper. I noticed that ethercat have been tested for Openplcproject with RPI also. All information and developers are separated and working with same problems without idea that someone is making just same thing elsewhere.
Please Log in or Create an account to join the conversation.
- tetw
- Offline
- New Member
-
Less
More
- Posts: 6
- Thank you received: 0
23 Nov 2020 15:27 #190122
by tetw
Hi Grotius,
Hi Chimeno
I've installed grotius iso , but error don't change.
when I add slaves other than "EK1100" in the xml file ($home/Desktop/linuxcnc_axis/configs/sim.qtvcp_screens/ethercat_lcec.xml -- for grotius iso) in position "idx1"
either giving a "name=" or not.
Replied by tetw on topic Ethercat HAL driver
Download link : iso
Instructions : steps
This is for :
jc2ktr & tetw.
Hi Grotius,
Hi Chimeno
I've installed grotius iso , but error don't change.
when I add slaves other than "EK1100" in the xml file ($home/Desktop/linuxcnc_axis/configs/sim.qtvcp_screens/ethercat_lcec.xml -- for grotius iso) in position "idx1"
"EL1104" EtherCAT ERROR 0 0: 1: PDO entry 0x6000: 01 is not mapped. (reading error)
EtherCAT WARNING 0: 125 datagrams TIMED OUT!
"EL2004" EtherCAT ERROR 0 0: 1: PDO entry 0x7000: 01 is not mapped. (Write error)either giving a "name=" or not.
Attachments:
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
23 Nov 2020 20:07 - 23 Nov 2020 20:12 #190139
by Grotius
Replied by Grotius on topic Ethercat HAL driver
@Tetw,
I checked both the EL1104 and EL2004 are available for the Lcec.
Your file is correct, your Os and Ethercat bus is correct.
Have you tried another cat4 cable? What does $ ethercat cstruct
say to you in terminal with only the EK1100?
And what do it say to you with EL1104 connected?
And what do it say to you with EL2004 connected?
This must work give the correct output, this command is doing a core command to the ethercat bus.
Is your EL1104 and EL2004 new out the box?
Are the EK1100 bus light's flickering fast?
Be aware of your filename..
It is ethercat-conf.xml
At this location : /home/ **yourname** /Desktop/linuxcnc_axis/configs/sim.qtvcp_screens/
You are giving up a different story by :
/ethercat_lcec.xml
I checked both the EL1104 and EL2004 are available for the Lcec.
Your file is correct, your Os and Ethercat bus is correct.
Have you tried another cat4 cable? What does $ ethercat cstruct
say to you in terminal with only the EK1100?
And what do it say to you with EL1104 connected?
And what do it say to you with EL2004 connected?
This must work give the correct output, this command is doing a core command to the ethercat bus.
Is your EL1104 and EL2004 new out the box?
Are the EK1100 bus light's flickering fast?
Be aware of your filename..
It is ethercat-conf.xml
At this location : /home/ **yourname** /Desktop/linuxcnc_axis/configs/sim.qtvcp_screens/
You are giving up a different story by :
/ethercat_lcec.xml
Last edit: 23 Nov 2020 20:12 by Grotius.
Please Log in or Create an account to join the conversation.
- tetw
- Offline
- New Member
-
Less
More
- Posts: 6
- Thank you received: 0
25 Nov 2020 17:01 - 25 Nov 2020 17:08 #190272
by tetw
Thanks grotius,
solved error 0x6000 the problem was the cable.
in the previous post I was wrong to enter xml.
I tried to insert only "ES9100" but you don't see it (ethercat slaves ethercat cstruct )?
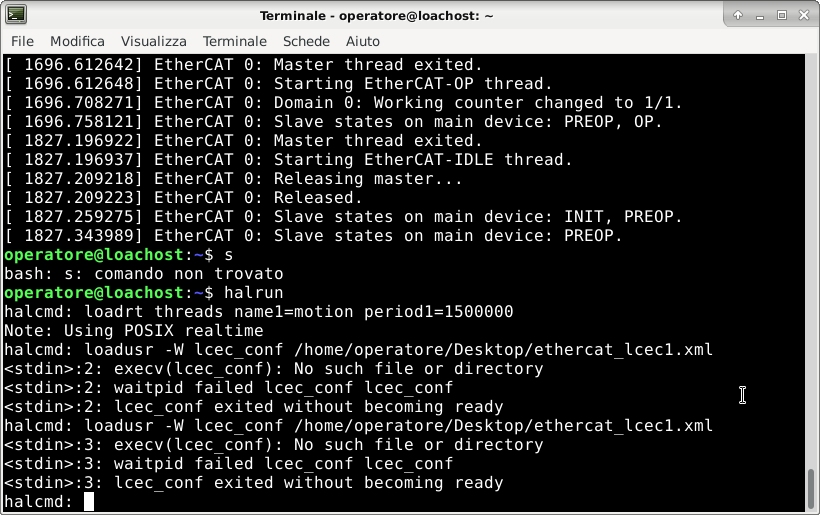
why in the terminal when I start halrun and load lcec it goes into error?
you have a link or file on how to write the xml file?
Replied by tetw on topic Ethercat HAL driver
@Tetw,
I checked both the EL1104 and EL2004 are available for the Lcec.
Your file is correct, your Os and Ethercat bus is correct.
Have you tried another cat4 cable? What does $ ethercat cstruct
say to you in terminal with only the EK1100?
It is ethercat-conf.xml
At this location : /home/ **yourname** /Desktop/linuxcnc_axis/configs/sim.qtvcp_screens/
You are giving up a different story by :
/ethercat_lcec.xml
Thanks grotius,
solved error 0x6000 the problem was the cable.
in the previous post I was wrong to enter xml.
I tried to insert only "ES9100" but you don't see it (ethercat slaves ethercat cstruct )?
why in the terminal when I start halrun and load lcec it goes into error?
you have a link or file on how to write the xml file?
Last edit: 25 Nov 2020 17:08 by tetw.
Please Log in or Create an account to join the conversation.
Time to create page: 0.256 seconds