Ethercat HAL driver
- jc2ktr
- Offline
- Premium Member
-

Less
More
- Posts: 87
- Thank you received: 17
03 Jan 2021 09:35 - 03 Jan 2021 09:36 #193938
by jc2ktr
Hi @bkt,
I am new to LinuxCNC and this is why i have little experience in Configuring ... so on, its obvius that i made many failures.
it was not my intention to complain about the drive's/manufacturer.
I am only an electrician, i usually mount the EtherCAT drives and Devices in an Electrical Control Cabinet and wire them only")
About the objects 6091 / 6092 when i try to readout the object in terminal with ethercat upload -p 7 -t int16 0x6092 01
it outputs this:
SDO transfer aborted with code 0x06020000: This object does not exist in the object directory
Also in TwinCAT it does not exist.
I try to get some information from the manufacturer too, and share my expirience here.
I have the manual, but it's sometimes little confusing
Replied by jc2ktr on topic Ethercat HAL driver
@sven ... my drives are Chinese too, but before complaining and saying that the assistance and manuals are bad I would like to give them the benefit of the doubt and wait for their end-of-year parties to end and finally back to the office to answer mine requests. Up to now I have been happy with them .... I tried their ethercat and I'm having problems, but I don't usually use ethercat in my work .... so maybe the cause is mine..... but I use different china drive type and brand .... however it is Chinese practice, and I think they have learned from the Japanese for this, consider the manual a kind of optional .... if you need a specific one you have to request it ... too often I have found some facts just for me ... .. also from famous Japan brands .... it seems to me that the user manual is a wholly European and American habit .... some mail makes a user complained of bad control on vdf thoshiba .... I guess he didn't ask the specific manual of the modbus .... Japanese "transcribe their secrets and most lustful commands" on the field bus in general (even ethercat or other) ..... this just to talk with friends.
Regarding my drives obviously if they don't give an answer I'll be happy to do bad publicity here on the forum.
in each case they are ethercat cia402 compliant drives, therefore objects 6091 subidx01 and 02 and 6092 subidx 01 and 02 should keep the gear ratio in memory so that the control units and encoder units can match .... now how now if I try to ascribing this from xml is not accepted (but this would also be correct, the values should be permanently written in eeprom) and from twincat I don't see the registers. I believe at this point that I need a software from the manufacturer. Your ET60 must be the same I think .... but your manual is not online on producer sites I see .... so that ssnz a well written manual is impossible to know how things are, for you as well as for me.
regards
btk
Hi @bkt,
I am new to LinuxCNC and this is why i have little experience in Configuring ... so on, its obvius that i made many failures.
it was not my intention to complain about the drive's/manufacturer.
I am only an electrician, i usually mount the EtherCAT drives and Devices in an Electrical Control Cabinet and wire them only
About the objects 6091 / 6092 when i try to readout the object in terminal with ethercat upload -p 7 -t int16 0x6092 01
it outputs this:
SDO transfer aborted with code 0x06020000: This object does not exist in the object directory
Also in TwinCAT it does not exist.
I try to get some information from the manufacturer too, and share my expirience here.
I foud your manual here :)) forum.linuxcnc.org/24-hal-components/223...mkjlovaxfw&start=910
I see your problem .... nothing about gear scaling or scaling on manual .... :pinch: :pinch: and in xml many references to modbus world .... I have the supect you must set scaling parameter via modbus .... than you can use axis correctly.
regards
bktI have the manual, but it's sometimes little confusing
Last edit: 03 Jan 2021 09:36 by jc2ktr. Reason: edit
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-

Less
More
- Posts: 295
- Thank you received: 125
03 Jan 2021 17:47 - 03 Jan 2021 17:49 #193969
by chimeno
Replied by chimeno on topic Ethercat HAL driver
Hello @btk,
-the scale you have in the .ini file doesn't point to any signals.
-you are sure that the registry of
-It seems to me that the record would bebut I could be wrong
-Have you tried to change the scale here?
Hello @jc2ktr
-Have you used the manufacturer's program to find the appropriate values?
* you need to configure the engine parameters, I assume you are using an ECT60
When configuring in position mode, linux no longer has control over the diver, it only sends position and reads position, you have to apply the scale here
-the scale you have in the .ini file doesn't point to any signals.
-you are sure that the registry of
<pdo idx="1A03">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="driverStatus" halType="bit"/>
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="posActual" halType="float" scale="0.001"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torActual" halType="float"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velActual" halType="float" scale="0.001"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="errorStat" halType="float"/>-It seems to me that the record would be
1A00-Have you tried to change the scale here?
scale="0.001"Hello @jc2ktr
-Have you used the manufacturer's program to find the appropriate values?
* you need to configure the engine parameters, I assume you are using an ECT60
When configuring in position mode, linux no longer has control over the diver, it only sends position and reads position, you have to apply the scale here
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscmd" halType="float" scale="1000"/><pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="actpos" halType="float" scale=".001"/>
Last edit: 03 Jan 2021 17:49 by chimeno. Reason: edit
The following user(s) said Thank You: bkt, jc2ktr
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
03 Jan 2021 18:37 - 03 Jan 2021 18:47 #193971
by jc2ktr
Hello @Chimeno,
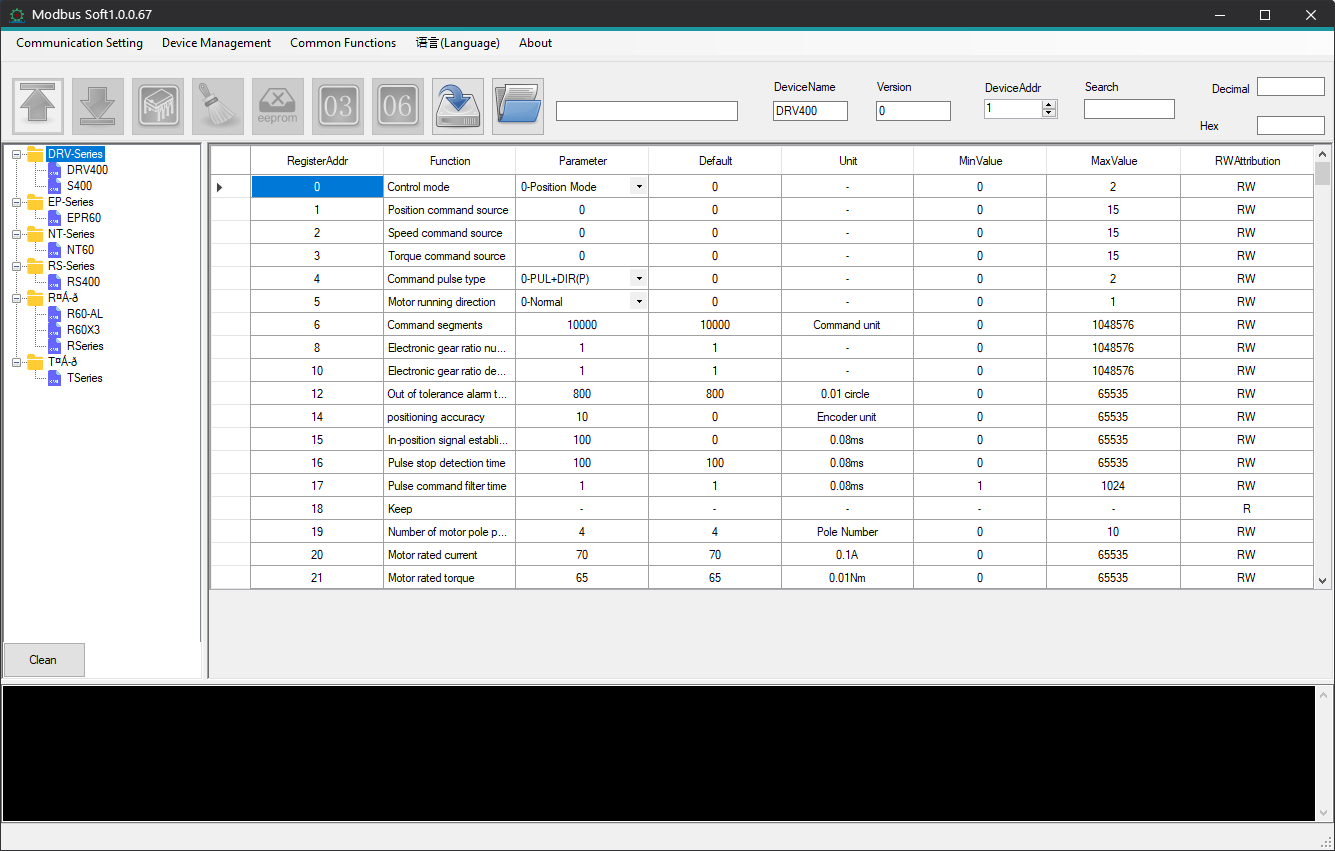
i tried to setup/configure my driver with the program, but it seems that my driver is not compatible with it. I always got error messages.
And in the Selection window my driver was not listed, even when i tried to load the .xml file which i got with my driver.
even when i try to scale my signals in these lines:
it does not change the moved distance... when jog 10mm the axis moves 25
i will write a email to rtelligent about my scaling issue, and wait what they have to say.
Maybe it´s a stupid simple solution")
Thanks again chimeno
Replied by jc2ktr on topic Ethercat HAL driver
Hello @jc2ktr
-Have you used the manufacturer's program to find the appropriate values?
* you need to configure the engine parameters, I assume you are using an ECT60
When configuring in position mode, linux no longer has control over the diver, it only sends position and reads position, you have to apply the scale here
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscmd" halType="float" scale="1000"/><pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="actpos" halType="float" scale=".001"/>
Hello @Chimeno,
i tried to setup/configure my driver with the program, but it seems that my driver is not compatible with it. I always got error messages.
And in the Selection window my driver was not listed, even when i tried to load the .xml file which i got with my driver.
even when i try to scale my signals in these lines:
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscmd" halType="float" scale="1000"/><pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="actpos" halType="float" scale=".001"/>it does not change the moved distance... when jog 10mm the axis moves 25
i will write a email to rtelligent about my scaling issue, and wait what they have to say.
Maybe it´s a stupid simple solution
Thanks again chimeno
Attachments:
Last edit: 03 Jan 2021 18:47 by jc2ktr. Reason: picture added
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
03 Jan 2021 18:55 #193973
by chimeno
Replied by chimeno on topic Ethercat HAL driver
Hello @jc2ktr
If it may be a good idea to send an email if they can help you,
can you check this if the scale changes?
Greeting
Chimeno
If it may be a good idea to send an email if they can help you,
can you check this if the scale changes?
Greeting
Chimeno
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
03 Jan 2021 19:14 #193975
by jc2ktr
@Chimeno
i tested the 0x2020 parameter about a day ago, i´ve set it to 666 pulses per revolution the value was 4000 pulses per revolution my Ballscrew/KR33 Axis has a pitch of 6mm per revolution 4000/6=666.6666666666667
after setting this the motor wasnt able to run anymore under linuxcnc, it stalled momentarily, and made squeeking/scratching noises as i commanded him to move. so i set them back to 4000 cpr.
greets Sven
Replied by jc2ktr on topic Ethercat HAL driver
Hello @jc2ktr
If it may be a good idea to send an email if they can help you,
can you check this if the scale changes?
Greeting
Chimeno
@Chimeno
i tested the 0x2020 parameter about a day ago, i´ve set it to 666 pulses per revolution the value was 4000 pulses per revolution my Ballscrew/KR33 Axis has a pitch of 6mm per revolution 4000/6=666.6666666666667
after setting this the motor wasnt able to run anymore under linuxcnc, it stalled momentarily, and made squeeking/scratching noises as i commanded him to move. so i set them back to 4000 cpr.
greets Sven
Please Log in or Create an account to join the conversation.
- bkt
-

- Offline
- Platinum Member
-

Less
More
- Posts: 1111
- Thank you received: 114
06 Jan 2021 09:58 - 06 Jan 2021 10:03 #194195
by bkt
Replied by bkt on topic Ethercat HAL driver
@sven ...
I have the manual, but it's sometimes little confusing
I see the manual you are in right. i think 6091 and 6092 composed from 2 index each maybe not exist because not present on firmware of manufactorer. Is possible .... but not a good things because if it is CIA402 compliant it must exist. So these is an issue of manufactorer ....
In my cases it these registry it exsist but I not understand how to write in it, plus in twincat is not possible to see these registry, only from driver display, but not understat how to write in it. If I use a sdo the drive go to in error as if I had made a mistake in calculating the numerator and denominator of the reduction ratios that must be entered in those registers. ..... plus in manual is not present a right procedure to write in it or see it in twincat.
@Chimeno .... real thanks ... you are in right "pdo idx=1A00" is the right one ..... but these driver accepts 1A03 too if I add some pin read for velocity and torque..... I try to change into 1A00 but I think I try it some mounth ago without success .... Any how if try to change 6064 scale I obtain every time follow error from linuxcnc at startup .... I think because impossible to set 6092 & 6091 registry in drive firmware.
regards
bkt

Last edit: 06 Jan 2021 10:03 by bkt.
The following user(s) said Thank You: chimeno
Please Log in or Create an account to join the conversation.
- sqmathlete
- Offline
- Premium Member
-
Less
More
- Posts: 118
- Thank you received: 18
06 Jan 2021 15:39 #194236
by sqmathlete
Replied by sqmathlete on topic Ethercat HAL driver
Hi,
Have you checked the manufacturer's website for the latest version of the servo's .xml file? Also, look in this file for the objects that you are interested in. I wouldn't make any changes to this file but at least you can see which objects are available. If the amp is supposed to be compliant with the CIA 402 profile than it seems odd that the standard objects would not be available.
Kind regards,
Dan
I think 6091 and 6092 composed from 2 index each maybe not exist because not present on firmware of manufacture
Have you checked the manufacturer's website for the latest version of the servo's .xml file? Also, look in this file for the objects that you are interested in. I wouldn't make any changes to this file but at least you can see which objects are available. If the amp is supposed to be compliant with the CIA 402 profile than it seems odd that the standard objects would not be available.
Kind regards,
Dan
Please Log in or Create an account to join the conversation.
- MRBaird
- Offline
- New Member
-

Less
More
- Posts: 8
- Thank you received: 5
06 Jan 2021 19:38 #194268
by MRBaird
Replied by MRBaird on topic Ethercat HAL driver
Well I finally got my ECT-60 scaled. I am using 5mm pitch leadscrew so 300RPM = 1500mm/M. After rereading the manual i noticed that Target Velocity and Target Position are in pulses!!! LinuxCNC uses machine units. So at 4000 pulses per revaluation from the manual I get 800 pulses for 1mm. I don't know why 4000 pulses because the motor description say 1000 count encoder. my guess is microstepping in the drive.
<!-- Target Position -->
<pdoEntry idx="607a" subIdx="00" bitLen="32" halPin="TargetPosition" halType="float" scale="800"/>
<!-- Target Velocity -->
<pdoEntry idx="60ff" subIdx="00" bitLen="32" halPin="TargetVelocity" halType="float" scale="800"/>
I have this test drive at the office. Have not tried at home with multiple drives.
<!-- Target Position -->
<pdoEntry idx="607a" subIdx="00" bitLen="32" halPin="TargetPosition" halType="float" scale="800"/>
<!-- Target Velocity -->
<pdoEntry idx="60ff" subIdx="00" bitLen="32" halPin="TargetVelocity" halType="float" scale="800"/>
I have this test drive at the office. Have not tried at home with multiple drives.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21663
- Thank you received: 7400
06 Jan 2021 20:05 #194276
by tommylight
www.dynapar.com/technology/encoder_basics/quadrature_encoder/
Replied by tommylight on topic Ethercat HAL driver
Scroll down to the middle of the page, there is the explanation why 1000 pules of the quadrature encoder make 4000 counts, servo drives do not use microstepping.I don't know why 4000 pulses because the motor description say 1000 count encoder. my guess is microstepping in the drive.
www.dynapar.com/technology/encoder_basics/quadrature_encoder/
The following user(s) said Thank You: MRBaird
Please Log in or Create an account to join the conversation.
- jc2ktr
- Offline
- Premium Member
-
Less
More
- Posts: 87
- Thank you received: 17
08 Jan 2021 20:12 - 08 Jan 2021 20:17 #194539
by jc2ktr
Thanks for the information, so that means that my ballscrew with 6mm pitch has a scale of 4000/6 = 666.666...
Hm i will try it tomorrow.
Seems a good start.
May i ask you how scaled the feedback from the ECT?
The ETC60 is not a Servo, it is a Closed-Loop Stepper with EtherCAT interface from my understanding.
Right the disk has 1000 increments but from counting the rising and falling edges on 2 channels you get 4000 counts per revolution.
Replied by jc2ktr on topic Ethercat HAL driver
Well I finally got my ECT-60 scaled. I am using 5mm pitch leadscrew so 300RPM = 1500mm/M. After rereading the manual i noticed that Target Velocity and Target Position are in pulses!!! LinuxCNC uses machine units. So at 4000 pulses per revaluation from the manual I get 800 pulses for 1mm. I don't know why 4000 pulses because the motor description say 1000 count encoder. my guess is microstepping in the drive.
<!-- Target Position -->
<pdoEntry idx="607a" subIdx="00" bitLen="32" halPin="TargetPosition" halType="float" scale="800"/>
<!-- Target Velocity -->
<pdoEntry idx="60ff" subIdx="00" bitLen="32" halPin="TargetVelocity" halType="float" scale="800"/>
I have this test drive at the office. Have not tried at home with multiple drives.
Thanks for the information, so that means that my ballscrew with 6mm pitch has a scale of 4000/6 = 666.666...
Hm i will try it tomorrow.
Seems a good start.
May i ask you how scaled the feedback from the ECT?
Scroll down to the middle of the page, there is the explanation why 1000 pules of the quadrature encoder make 4000 counts, servo drives do not use microstepping.I don't know why 4000 pulses because the motor description say 1000 count encoder. my guess is microstepping in the drive.
www.dynapar.com/technology/encoder_basics/quadrature_encoder/
The ETC60 is not a Servo, it is a Closed-Loop Stepper with EtherCAT interface from my understanding.
Right the disk has 1000 increments but from counting the rising and falling edges on 2 channels you get 4000 counts per revolution.
Last edit: 08 Jan 2021 20:17 by jc2ktr. Reason: edit
Please Log in or Create an account to join the conversation.
Time to create page: 0.236 seconds