Search Results (Searched for: )
- SebastianM
- SebastianM
14 Jun 2025 19:20 - 14 Jun 2025 19:21
Replied by SebastianM on topic Error finishing read... *sigh*
Error finishing read... *sigh*
Category: Computers and Hardware
- SebastianM
- SebastianM
14 Jun 2025 19:09 - 14 Jun 2025 19:21
Replied by SebastianM on topic Error finishing read... *sigh*
Error finishing read... *sigh*
Category: Computers and Hardware
- PCW

14 Jun 2025 18:12
Replied by PCW on topic Error finishing read... *sigh*
Error finishing read... *sigh*
Category: Computers and Hardware
- SebastianM
- SebastianM
14 Jun 2025 16:44
Error finishing read... *sigh* was created by SebastianM
Error finishing read... *sigh*
Category: Computers and Hardware
- melodic_cnc
- melodic_cnc
14 Jun 2025 16:33 - 14 Jun 2025 16:34
Is there a way to have more than 9 coordinate systems? was created by melodic_cnc
Is there a way to have more than 9 coordinate systems?
Category: General LinuxCNC Questions
- Creative25
- Creative25
14 Jun 2025 13:31 - 14 Jun 2025 13:55
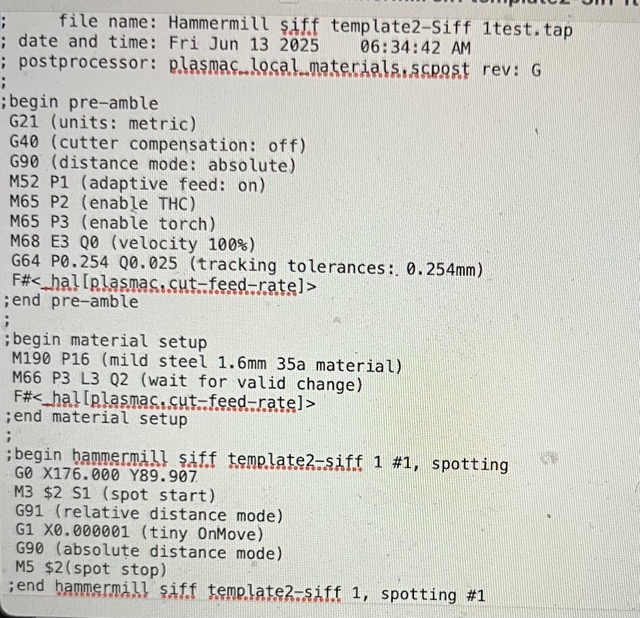
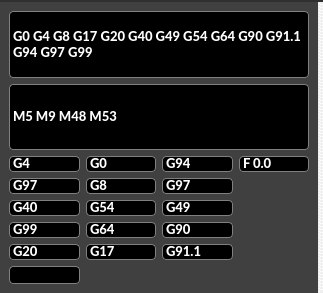
Setting up a spotting operation with Sheetcam. was created by Creative25
Setting up a spotting operation with Sheetcam.
Category: Plasmac
- beauxnez
- beauxnez
14 Jun 2025 11:26 - 05 Jul 2025 13:28
- Creative25
- Creative25
14 Jun 2025 11:24 - 14 Jun 2025 11:27
Replied by Creative25 on topic FreeCAD 1.0 Who's using it?
FreeCAD 1.0 Who's using it?
Category: CAD CAM
- jackj120
- jackj120
14 Jun 2025 10:57
Replied by jackj120 on topic Mecanumeric MF2040 LI retrofit (Pantograph)
Mecanumeric MF2040 LI retrofit (Pantograph)
Category: Milling Machines
- beauxnez
- beauxnez
14 Jun 2025 09:49
- billykid

14 Jun 2025 09:28
Replied by billykid on topic Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Category: Installing LinuxCNC
")
- tar_san
- tar_san
14 Jun 2025 07:32
Replied by tar_san on topic cia402_homecomp , Are there any config sample? (Lichuan LC10E + Simple XYZ)
cia402_homecomp , Are there any config sample? (Lichuan LC10E + Simple XYZ)
Category: EtherCAT
- cmorley
- cmorley
14 Jun 2025 06:24
Replied by cmorley on topic GUI that somewhat resembles haas or fanuc workflow.
GUI that somewhat resembles haas or fanuc workflow.
Category: General LinuxCNC Questions
- cmorley
- cmorley
14 Jun 2025 06:17
Replied by cmorley on topic [QtDragon][2.9.4] Tool probe starts before M6 dialog "OK" confirmation
[QtDragon][2.9.4] Tool probe starts before M6 dialog "OK" confirmation
Category: Qtvcp
- cmorley
- cmorley
14 Jun 2025 05:29
Time to create page: 0.546 seconds