Search Results (Searched for: )
- langdons

17 Jan 2025 14:32
Replied by langdons on topic Where to buy inexpensive, reliable stepper drivers in Canada.
Where to buy inexpensive, reliable stepper drivers in Canada.
Category: Driver Boards
- langdons
17 Jan 2025 14:29
Replied by langdons on topic Where to buy inexpensive, reliable stepper drivers in Canada.
Where to buy inexpensive, reliable stepper drivers in Canada.
Category: Driver Boards
- SummerLotus
- SummerLotus
17 Jan 2025 14:01
Replied by SummerLotus on topic Ethercat Cable Redundancy
Ethercat Cable Redundancy
Category: EtherCAT
- tommylight

17 Jan 2025 12:59
Replied by tommylight on topic LinuxCNC on Intel Clear Linux
LinuxCNC on Intel Clear Linux
Category: Installing LinuxCNC
- AlexMagToast

17 Jan 2025 12:42 - 17 Jan 2025 12:44
Replied by AlexMagToast on topic Arduino IO Expansion
Arduino IO Expansion
Category: Show Your Stuff
 " where we explored other connection possibilitys, for example Ethernet TCP and UDP connections.
" where we explored other connection possibilitys, for example Ethernet TCP and UDP connections.- Grotius

17 Jan 2025 12:25 - 17 Jan 2025 12:27
scurve trajectory planner was created by Grotius
scurve trajectory planner
Category: General LinuxCNC Questions
- Cant do this anymore bye all

17 Jan 2025 12:18
Multi use FPGA Project was created by Cant do this anymore bye all
Multi use FPGA Project
Category: Show Your Stuff
- Cant do this anymore bye all
17 Jan 2025 12:03
Replied by Cant do this anymore bye all on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Category: Driver Boards
- onceloved

17 Jan 2025 11:50
Replied by onceloved on topic Stepperonline A6 etherCAT servo kit anyone?
Stepperonline A6 etherCAT servo kit anyone?
Category: Computers and Hardware
- Cant do this anymore bye all
17 Jan 2025 10:34
Replied by Cant do this anymore bye all on topic LinuxCNC on Intel Clear Linux
LinuxCNC on Intel Clear Linux
Category: Installing LinuxCNC
- Gautham
- Gautham
17 Jan 2025 09:07
Replied by Gautham on topic Rotating Axis Controlled by a Ballscrew
Rotating Axis Controlled by a Ballscrew
Category: Basic Configuration
- hmnijp
- hmnijp
17 Jan 2025 09:04
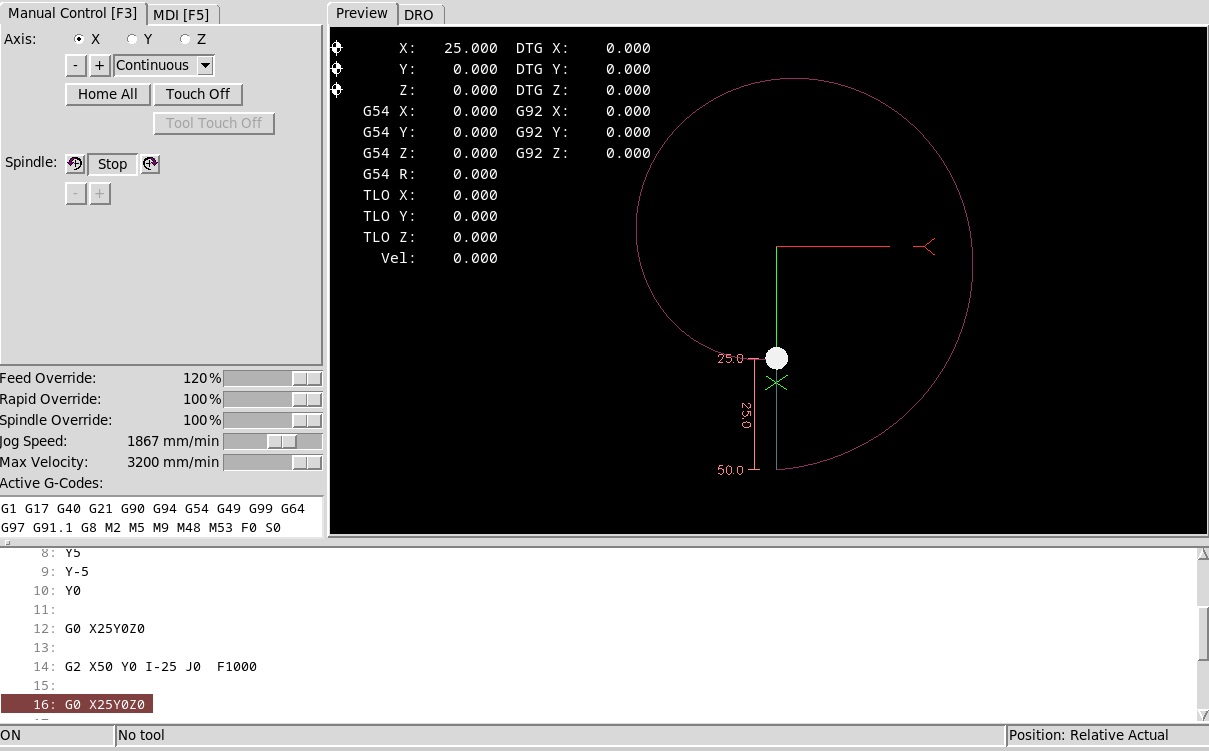
Replied by hmnijp on topic Error message "Radius to end of arc differs....etc etc"
Error message "Radius to end of arc differs....etc etc"
Category: General LinuxCNC Questions
- Nserega.90
- Nserega.90
17 Jan 2025 09:01
Replied by Nserega.90 on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Category: Driver Boards
- hellvetica
- hellvetica
17 Jan 2025 08:54
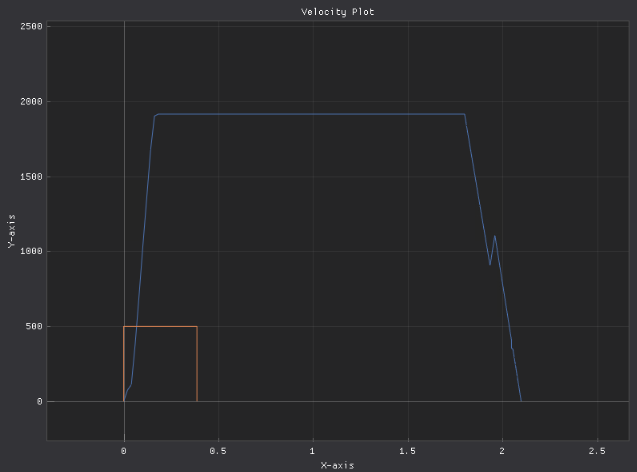
Weird artifact while decelerating high speed robot arm was created by hellvetica
Weird artifact while decelerating high speed robot arm
Category: General LinuxCNC Questions
- rebelx
- rebelx
17 Jan 2025 08:48
Replied by rebelx on topic LinuxCNC on Intel Clear Linux
LinuxCNC on Intel Clear Linux
Category: Installing LinuxCNC
Time to create page: 0.537 seconds