Search Results (Searched for: )
- machinedude

17 Feb 2025 20:31
Replied by machinedude on topic Black Friday Deal got me :)
Black Friday Deal got me :)
Category: Plasma & Laser
- Ri
- Ri
17 Feb 2025 20:26
Replied by Ri on topic Issue with Access - "pin is not writable" Error when using setp
Issue with Access - "pin is not writable" Error when using setp
Category: EtherCAT
- vre
- vre
17 Feb 2025 20:20
Replied by vre on topic Can the OPI5 be Configured to Run LCNC?
Can the OPI5 be Configured to Run LCNC?
Category: Computers and Hardware
- 3404gerber
- 3404gerber
17 Feb 2025 20:12 - 18 Feb 2025 08:28
Replied by 3404gerber on topic Remora - Rpi Software Stepping Using External Microcontroller via SPI
Remora - Rpi Software Stepping Using External Microcontroller via SPI
Category: Computers and Hardware
- PCW

17 Feb 2025 20:11
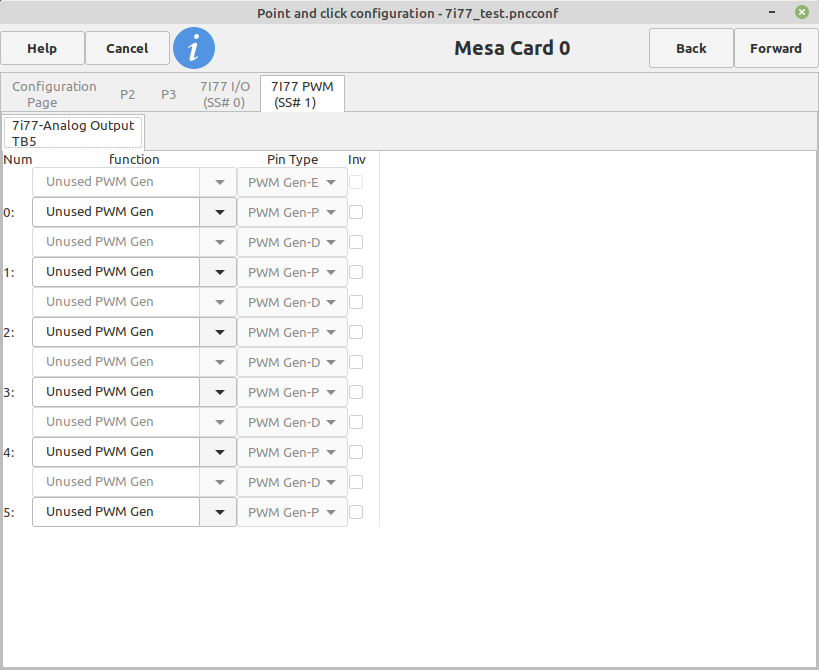
Replied by PCW on topic Problem with 6i25 + 7i77 PWM Pins
Problem with 6i25 + 7i77 PWM Pins
Category: PnCConf Wizard
- NT4Boy
- NT4Boy
17 Feb 2025 20:10
Replied by NT4Boy on topic HURCO KMB-1 Control Update
HURCO KMB-1 Control Update
Category: Milling Machines
- TooTall18T

17 Feb 2025 20:03
Replied by TooTall18T on topic Probe Basic no feed override slider while cycle run - solved
Probe Basic no feed override slider while cycle run - solved
Category: QtPyVCP
- TooTall18T
17 Feb 2025 19:56
Replied by TooTall18T on topic Probe Basic V.5 - kein Feedregler mehr? Solved
Probe Basic V.5 - kein Feedregler mehr? Solved
Category: Deutsch
- Grotius

17 Feb 2025 19:52 - 17 Feb 2025 20:01
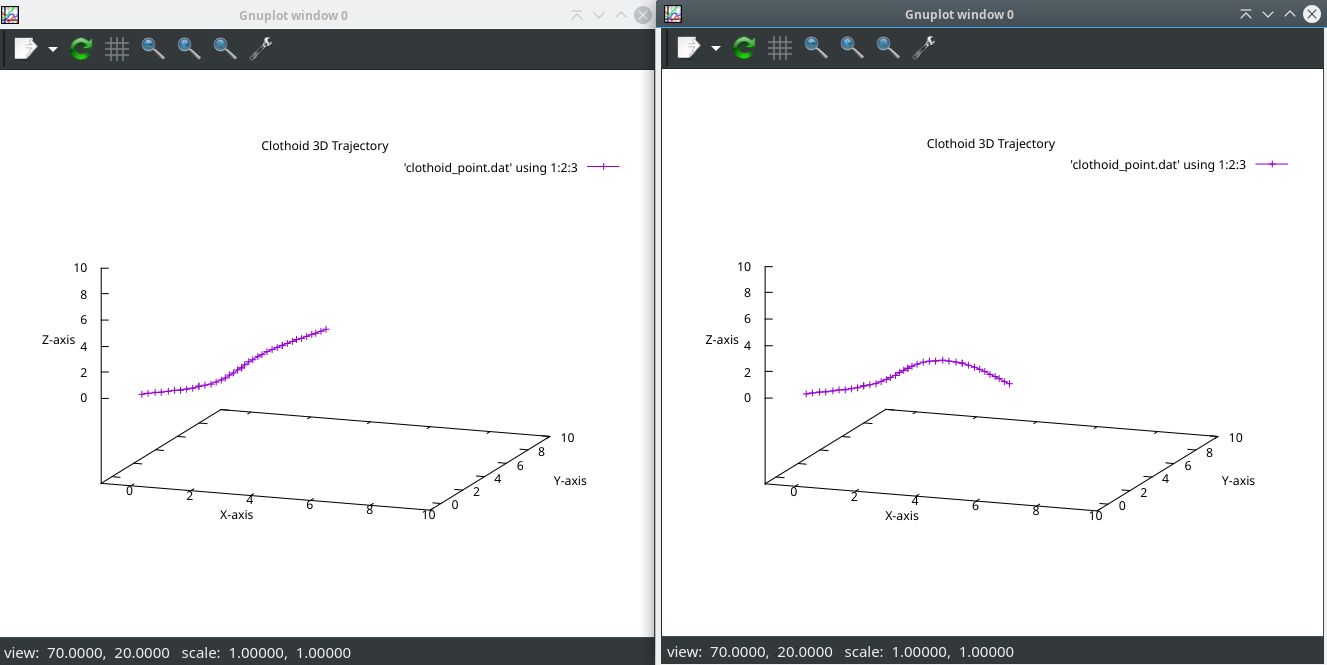
Replied by Grotius on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- scotta

17 Feb 2025 19:43
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- scotta
17 Feb 2025 19:35
- Aciera

17 Feb 2025 19:21
Replied by Aciera on topic Kinematics for nutating table rotary
Kinematics for nutating table rotary
Category: Show Your Stuff
- Simi02
- Simi02
17 Feb 2025 19:13
Problem with 6i25 + 7i77 PWM Pins was created by Simi02
Problem with 6i25 + 7i77 PWM Pins
Category: PnCConf Wizard

- PCW
17 Feb 2025 19:12
Replied by PCW on topic Servo Oscillation Issue at ±6.6V 5i25 + 7i77, Analog Control
Servo Oscillation Issue at ±6.6V 5i25 + 7i77, Analog Control
Category: Basic Configuration
- rodw

17 Feb 2025 18:53
Replied by rodw on topic Move Machine to inside soft limits when Probe Basic on
Move Machine to inside soft limits when Probe Basic on
Category: QtPyVCP
Time to create page: 1.450 seconds