Search Results (Searched for: )
- pawel77
- pawel77
21 Aug 2024 13:07
- Pickle
- Pickle
21 Aug 2024 12:02
Replied by Pickle on topic [ Vfdmod ] An easy VFD control over MODBUS RTU
[ Vfdmod ] An easy VFD control over MODBUS RTU
Category: HAL
- Aciera

21 Aug 2024 11:00
Replied by Aciera on topic Post GUI HAL not loading and "Bad character '[' used" error on E-Stop
Post GUI HAL not loading and "Bad character '[' used" error on E-Stop
Category: QtPyVCP
- TheRoslyak

21 Aug 2024 10:34 - 21 Aug 2024 10:35
- zmrdko

21 Aug 2024 09:44 - 21 Aug 2024 09:44
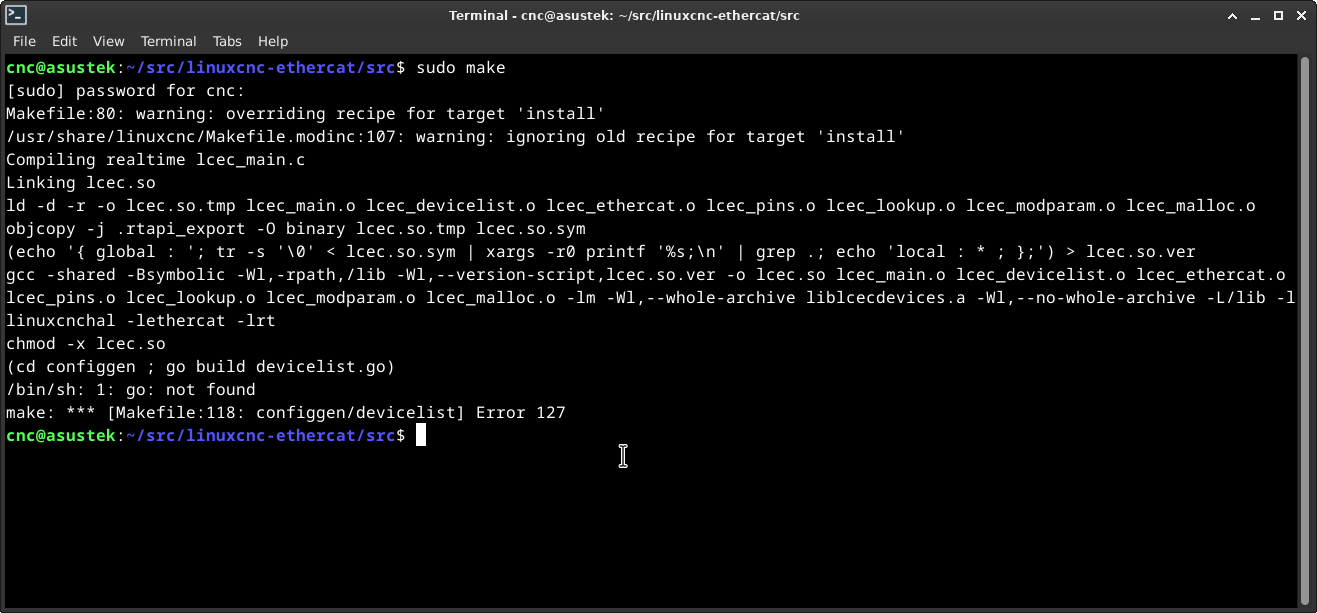
Replied by zmrdko on topic New LinuxCNC-Ethercat git tree
New LinuxCNC-Ethercat git tree
Category: EtherCAT
- greg23_78
- greg23_78
21 Aug 2024 09:34 - 21 Aug 2024 10:06
- avive
- avive
21 Aug 2024 09:15
Replied by avive on topic Message: "Ignoring task mode change while jogging"
Message: "Ignoring task mode change while jogging"
Category: GladeVCP
- Aciera
21 Aug 2024 09:14
- Aciera
21 Aug 2024 09:11
Replied by Aciera on topic Post GUI HAL not loading and "Bad character '[' used" error on E-Stop
Post GUI HAL not loading and "Bad character '[' used" error on E-Stop
Category: QtPyVCP
- Aciera
21 Aug 2024 09:00
- seuchato
- seuchato
21 Aug 2024 08:33
Replied by seuchato on topic Results of latency test, list of computers tested for use with LinuxCNC
Results of latency test, list of computers tested for use with LinuxCNC
Category: Computers and Hardware
") . I'd check the capacitors before making chips and/or have a spare one available. Not sure if such an old mobo is really a good idea as a cnc controller though.
. I'd check the capacitors before making chips and/or have a spare one available. Not sure if such an old mobo is really a good idea as a cnc controller though.- avive
- avive
21 Aug 2024 08:30
Replied by avive on topic Message: "Ignoring task mode change while jogging"
Message: "Ignoring task mode change while jogging"
Category: GladeVCP
- slowpoke
- slowpoke
21 Aug 2024 07:50 - 21 Aug 2024 07:55
- zmrdko
21 Aug 2024 07:10
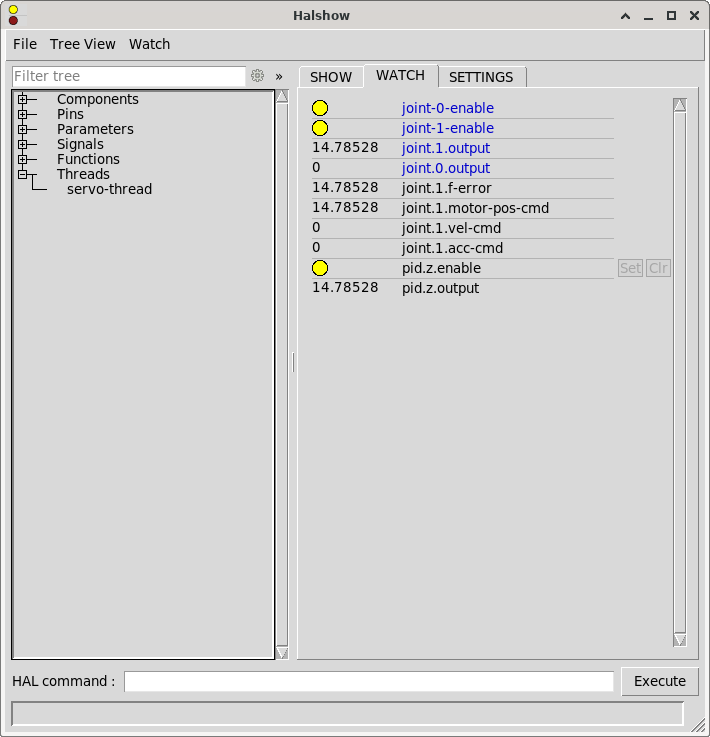
Replied by zmrdko on topic is there some basic list to build the net ?
is there some basic list to build the net ?
Category: EtherCAT
- bentiggin
- bentiggin
21 Aug 2024 06:59
Replied by bentiggin on topic Gui for standalone thc
Gui for standalone thc
Category: Plasma & Laser
Time to create page: 0.723 seconds