Search Results (Searched for: )
- TheRoslyak

06 Jun 2024 09:14 - 06 Jun 2024 09:25
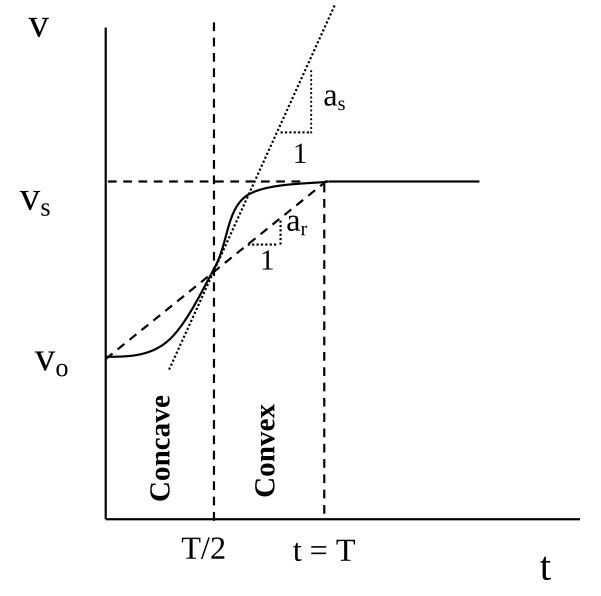
Replied by TheRoslyak on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- andypugh

06 Jun 2024 09:14
Replied by andypugh on topic Gearchange two gears, electronic clutch
Gearchange two gears, electronic clutch
Category: Advanced Configuration
- Grotius

06 Jun 2024 08:36
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- Grotius
06 Jun 2024 08:21
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- charlieLedezma

06 Jun 2024 08:20
Replied by charlieLedezma on topic Converting an old DMU 50, where to start?
Converting an old DMU 50, where to start?
Category: General LinuxCNC Questions
- Aciera

06 Jun 2024 08:02 - 06 Jun 2024 08:09
- Aciera
06 Jun 2024 07:55 - 06 Jun 2024 07:55
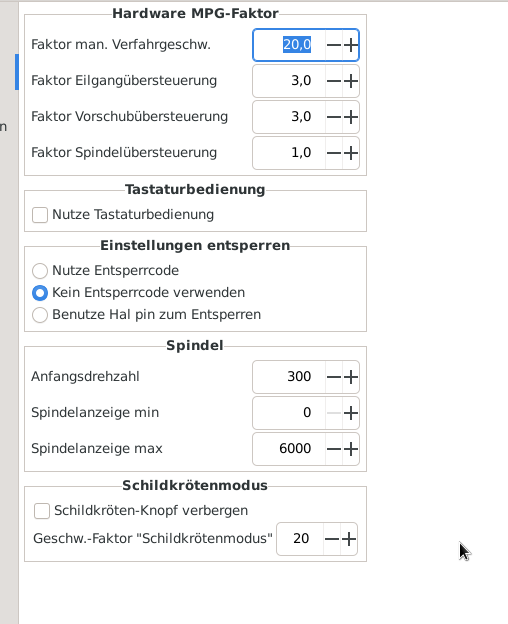
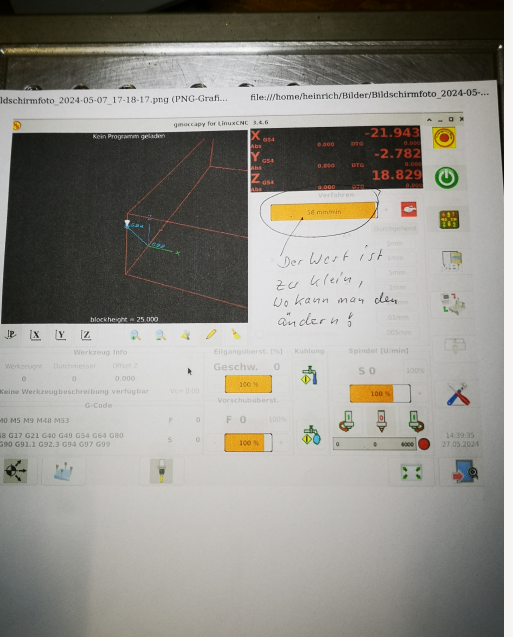
Replied by Aciera on topic gmoccapy verfahrgeschwinigkeit zu langsam
gmoccapy verfahrgeschwinigkeit zu langsam
Category: General LinuxCNC Questions
- Aciera
06 Jun 2024 07:48
Replied by Aciera on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- TheRoslyak
06 Jun 2024 07:48
Replied by TheRoslyak on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- Grotius
06 Jun 2024 07:17
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- karlhe
- karlhe
06 Jun 2024 07:10 - 08 Jun 2024 13:52
gmoccapy verfahrgeschwinigkeit zu langsam was created by karlhe
gmoccapy verfahrgeschwinigkeit zu langsam
Category: General LinuxCNC Questions
- Aciera
06 Jun 2024 06:56
Replied by Aciera on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- Lockwood
- Lockwood
06 Jun 2024 06:29
Replied by Lockwood on topic New design for a CNC engraver/etcher/scratcher ... ???
New design for a CNC engraver/etcher/scratcher ... ???
Category: Show Your Stuff
- jimmyrig
- jimmyrig
06 Jun 2024 05:26
- greg23_78
- greg23_78
06 Jun 2024 05:17
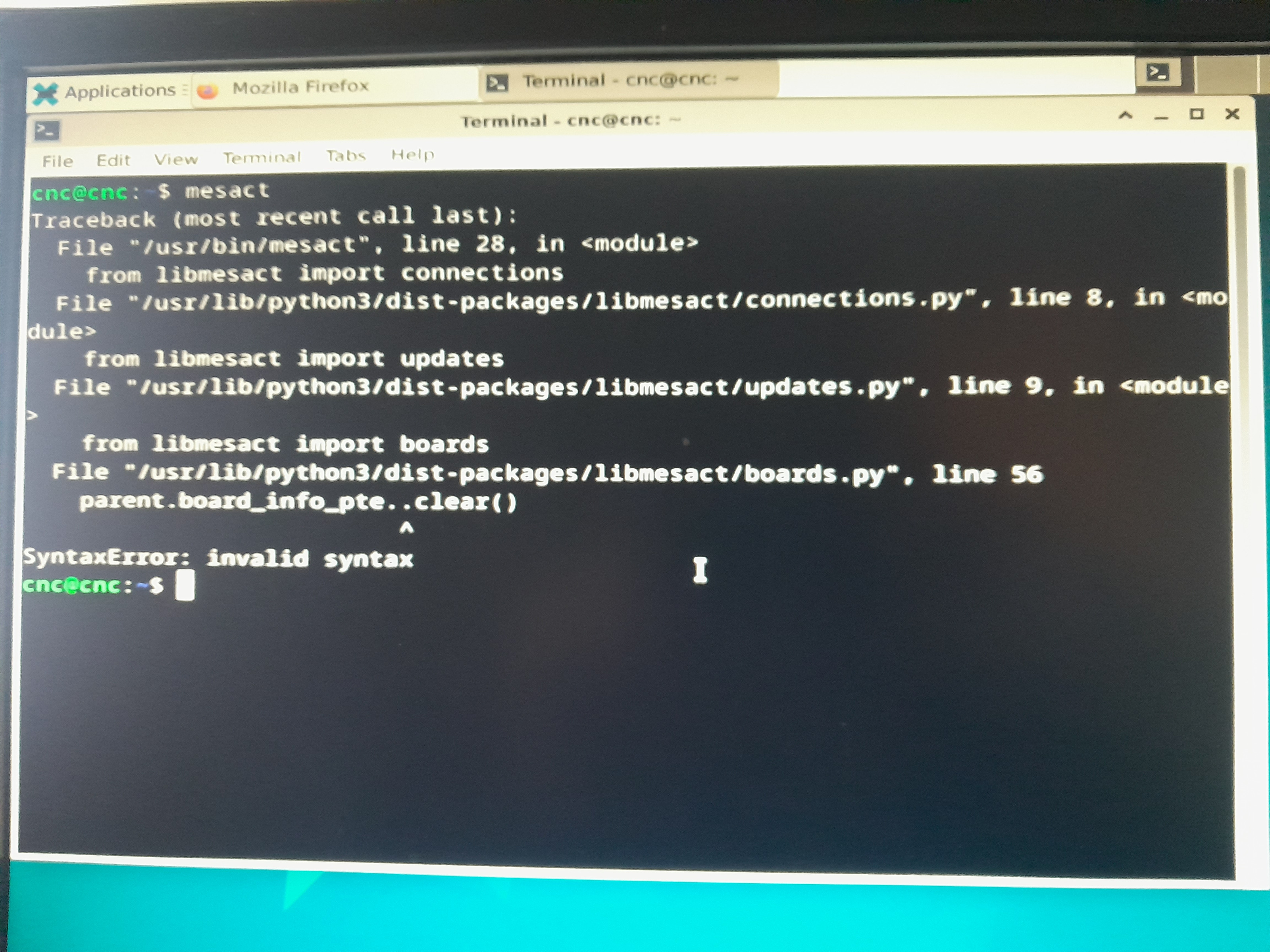
mesact - error or something missing was created by greg23_78
mesact - error or something missing
Category: Installing LinuxCNC
Time to create page: 0.571 seconds