Search Results (Searched for: )
- Mr. Mass

03 Feb 2026 15:01
- Marcos DC

03 Feb 2026 02:17
- EdWorks
03 Feb 2026 02:01
Replied by EdWorks on topic Running LinuxCNC on a Raspbery Pi5 using the Byte2Bot daughter board
Running LinuxCNC on a Raspbery Pi5 using the Byte2Bot daughter board
Category: Installing LinuxCNC
- NWE

03 Feb 2026 01:43 - 03 Feb 2026 01:59
- NWE
03 Feb 2026 01:24
- NWE
03 Feb 2026 01:00
- NWE
03 Feb 2026 00:57
- Marcos DC
03 Feb 2026 00:35 - 03 Feb 2026 00:36
- Marcos DC
03 Feb 2026 00:17
- NWE
02 Feb 2026 23:39
- NWE
02 Feb 2026 23:35
- NWE
02 Feb 2026 22:43 - 02 Feb 2026 23:07
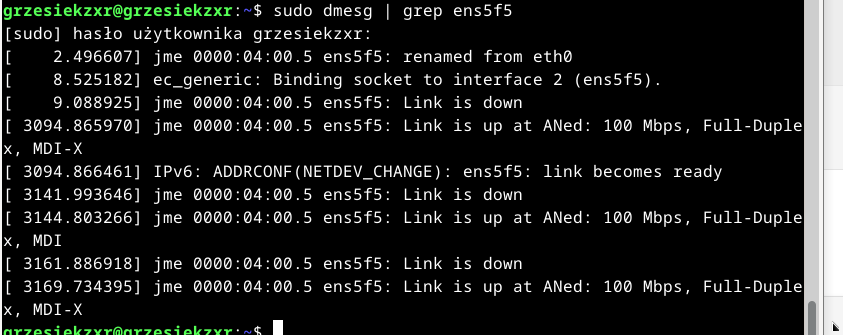
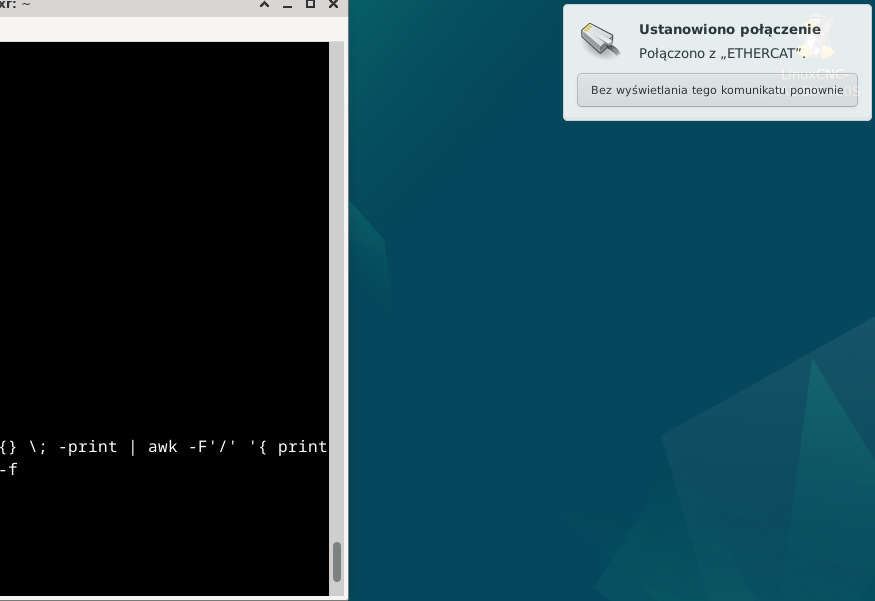
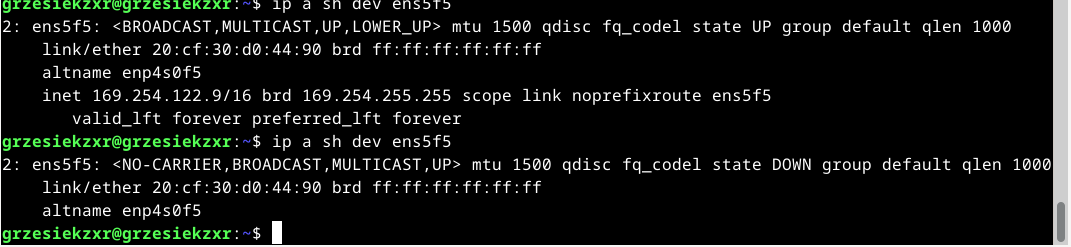
Replied by NWE on topic MAC address not retrieved (after 2 years stop)
MAC address not retrieved (after 2 years stop)
Category: Driver Boards
- Hakan
- Hakan
02 Feb 2026 21:46
- grzester
- grzester
02 Feb 2026 21:32
- grzester
- grzester
02 Feb 2026 21:24
Time to create page: 0.331 seconds