Search Results (Searched for: )
- jackdavies
09 May 2025 12:08
Replied by jackdavies on topic Magnetic scales on new gantry mill
Magnetic scales on new gantry mill
Category: General LinuxCNC Questions
- Todd Zuercher

09 May 2025 12:05 - 09 May 2025 12:12
Replied by Todd Zuercher on topic Control linuxcnc by FT sensor (external force)?
Control linuxcnc by FT sensor (external force)?
Category: Advanced Configuration
- DarkPhoinix
- DarkPhoinix
09 May 2025 12:01
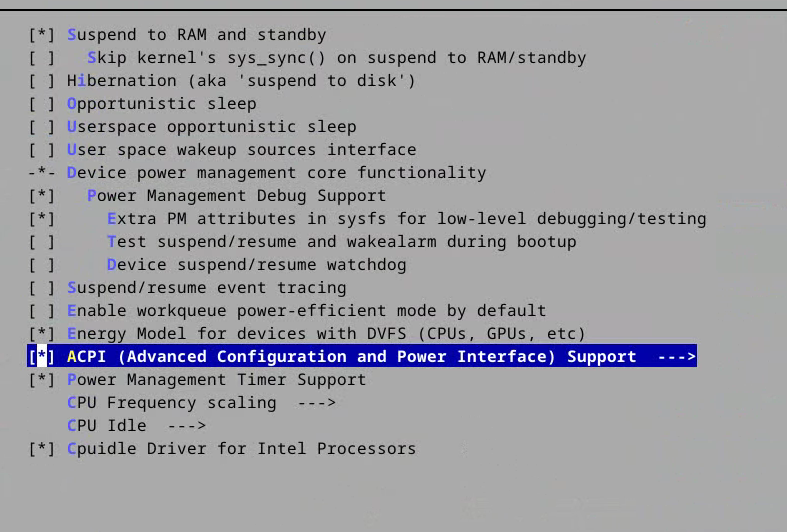
Replied by DarkPhoinix on topic Which kernel version is best for real time?
Which kernel version is best for real time?
Category: General LinuxCNC Questions
- Roger S
- Roger S
09 May 2025 11:56
- Todd Zuercher
09 May 2025 11:51
Replied by Todd Zuercher on topic analog Servo spins on its own when connected to 7i77
analog Servo spins on its own when connected to 7i77
Category: General LinuxCNC Questions
- DarkPhoinix
- DarkPhoinix
09 May 2025 11:46
Replied by DarkPhoinix on topic Which kernel version is best for real time?
Which kernel version is best for real time?
Category: General LinuxCNC Questions
- DarkPhoinix
- DarkPhoinix
09 May 2025 11:41
Replied by DarkPhoinix on topic Which kernel version is best for real time?
Which kernel version is best for real time?
Category: General LinuxCNC Questions
- unknown
- unknown
09 May 2025 11:39
Replied by unknown on topic Real Time and Latency
Real Time and Latency
Category: Computers and Hardware
- unknown
- unknown
09 May 2025 11:27
Replied by unknown on topic Which kernel version is best for real time?
Which kernel version is best for real time?
Category: General LinuxCNC Questions
- fery15sty
- fery15sty
09 May 2025 11:25 - 09 May 2025 11:26
- DarkPhoinix
- DarkPhoinix
09 May 2025 10:48
Replied by DarkPhoinix on topic Which kernel version is best for real time?
Which kernel version is best for real time?
Category: General LinuxCNC Questions
- DarkPhoinix
- DarkPhoinix
09 May 2025 08:29
Replied by DarkPhoinix on topic Which kernel version is best for real time?
Which kernel version is best for real time?
Category: General LinuxCNC Questions
- DarkPhoinix
- DarkPhoinix
09 May 2025 08:25 - 09 May 2025 18:09
Replied by DarkPhoinix on topic Best new Hardware for linuxcnc
Best new Hardware for linuxcnc
Category: Computers and Hardware
- hermann1976

09 May 2025 07:48
Replied by hermann1976 on topic Change Tool Offsets after editing the Tool Table
Change Tool Offsets after editing the Tool Table
Category: Gmoccapy
- Grotius

09 May 2025 06:55
Replied by Grotius on topic LinuxCNC S-Curve Accelerations
LinuxCNC S-Curve Accelerations
Category: General LinuxCNC Questions
Time to create page: 0.514 seconds