Search Results (Searched for: )
- andypugh

09 Apr 2025 13:40
Replied by andypugh on topic Weiler 160 CNC Retrofit
Weiler 160 CNC Retrofit
Category: Show Your Stuff
- my1987toyota

09 Apr 2025 13:23
Replied by my1987toyota on topic The dumification of humanity through internet
The dumification of humanity through internet
Category: Off Topic and Test Posts
- tommylight

09 Apr 2025 12:41
Replied by tommylight on topic The dumification of humanity through internet
The dumification of humanity through internet
Category: Off Topic and Test Posts
- tommylight
09 Apr 2025 12:38
Replied by tommylight on topic Firmware for 5i25
Firmware for 5i25
Category: General LinuxCNC Questions
- PCW

09 Apr 2025 12:34
- PCW
09 Apr 2025 12:25
- pgf
- pgf
09 Apr 2025 12:25
- my1987toyota
09 Apr 2025 11:50
Replied by my1987toyota on topic The dumification of humanity through internet
The dumification of humanity through internet
Category: Off Topic and Test Posts

- bevins

09 Apr 2025 11:50
- spumco
- spumco
09 Apr 2025 11:30
Replied by spumco on topic What do you really get for a $350 desk top engraver ?
What do you really get for a $350 desk top engraver ?
Category: Show Your Stuff
- JT

09 Apr 2025 11:26
- jenkinson8
- jenkinson8
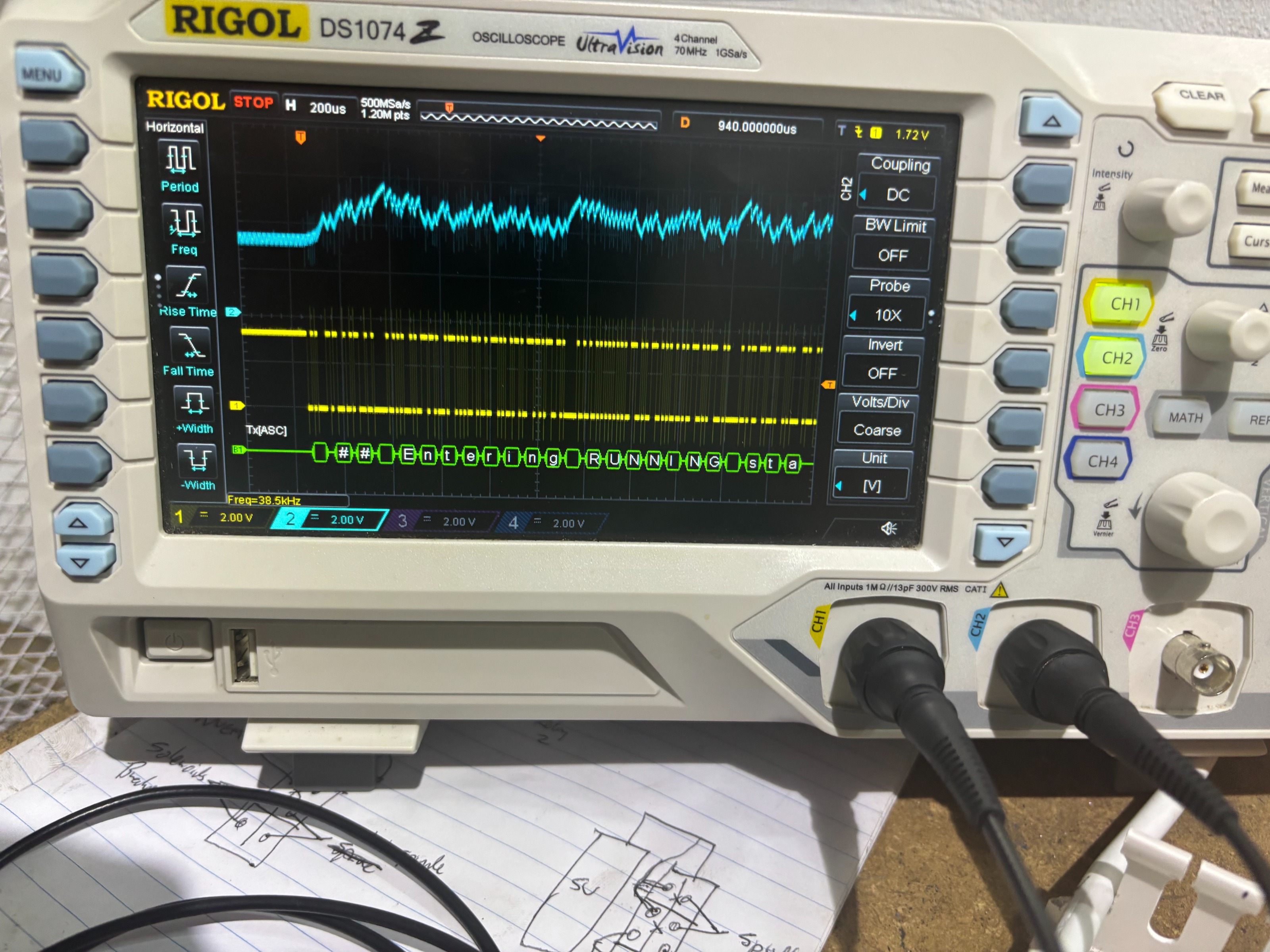
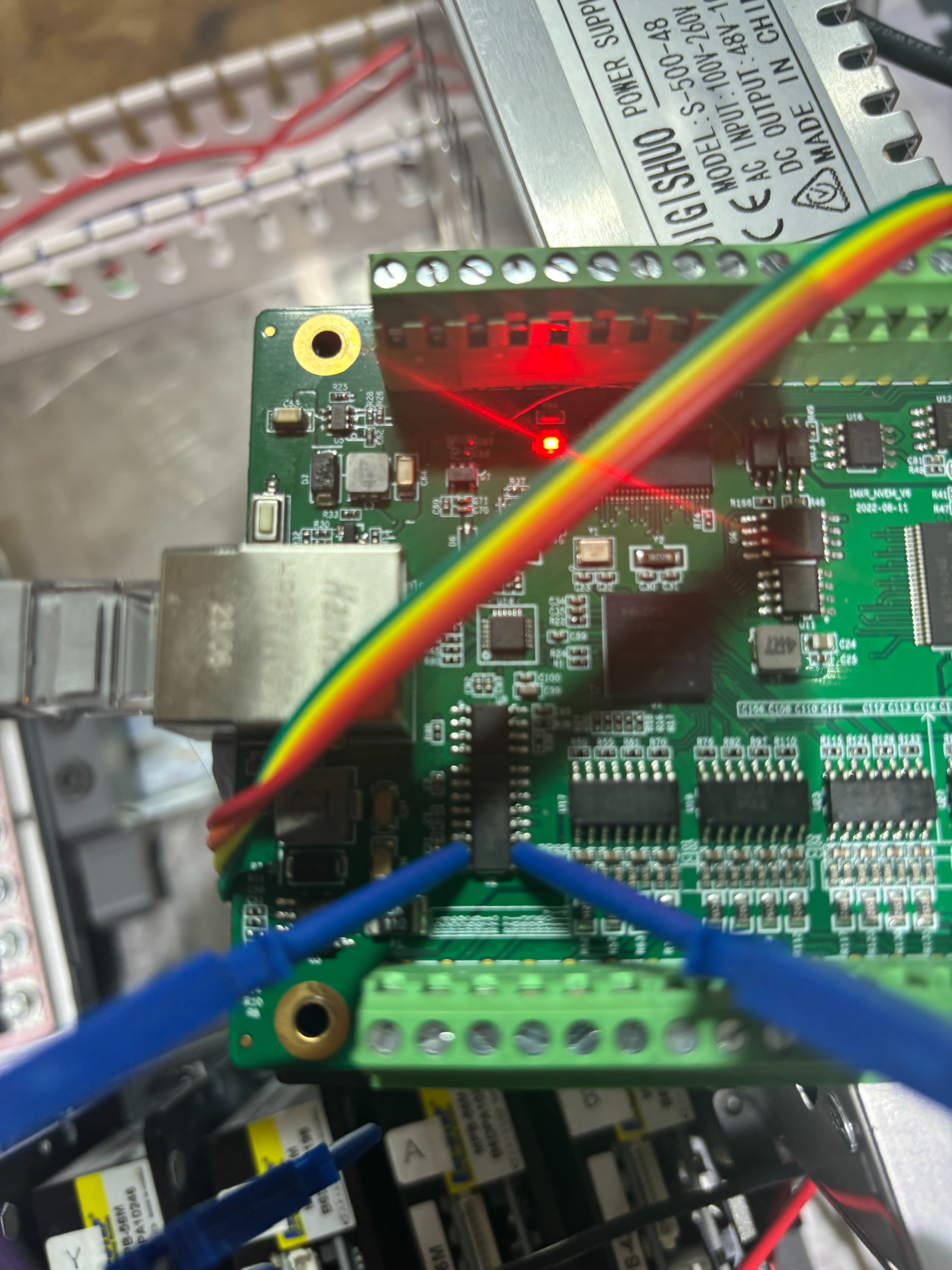
09 Apr 2025 10:06
Replied by jenkinson8 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- Boogie
- Boogie
09 Apr 2025 09:14
Replied by Boogie on topic ENCODER_RATIO function implementation.
ENCODER_RATIO function implementation.
Category: General LinuxCNC Questions
- Jan
- Jan
09 Apr 2025 08:41
Maschine only works in the Stepconf Wizard was created by Jan
Maschine only works in the Stepconf Wizard
Category: General LinuxCNC Questions
- snowgoer540

09 Apr 2025 08:29
Replied by snowgoer540 on topic Best cam software to use for plasma cutting
Best cam software to use for plasma cutting
Category: CAD CAM
Time to create page: 0.490 seconds