Search Results (Searched for: )
- choqui2010
- choqui2010
23 Oct 2024 22:37 - 23 Oct 2024 22:38
- phillc54

23 Oct 2024 22:33
- tommylight

23 Oct 2024 22:01
- choqui2010
- choqui2010
23 Oct 2024 21:43
- tommylight
23 Oct 2024 21:41
- tommylight
23 Oct 2024 21:36
- spontarelliam
- spontarelliam
23 Oct 2024 21:17
- choqui2010
- choqui2010
23 Oct 2024 21:15

- tommylight
23 Oct 2024 20:55
Replied by tommylight on topic c++ compiling error
c++ compiling error
Category: Advanced Configuration
- Grotius

23 Oct 2024 20:39
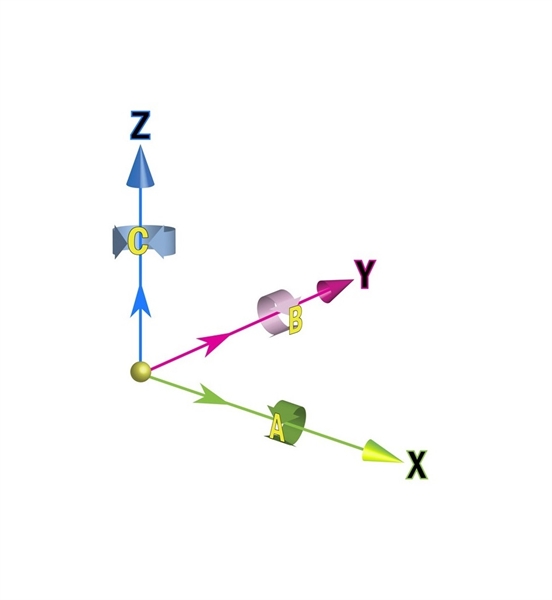
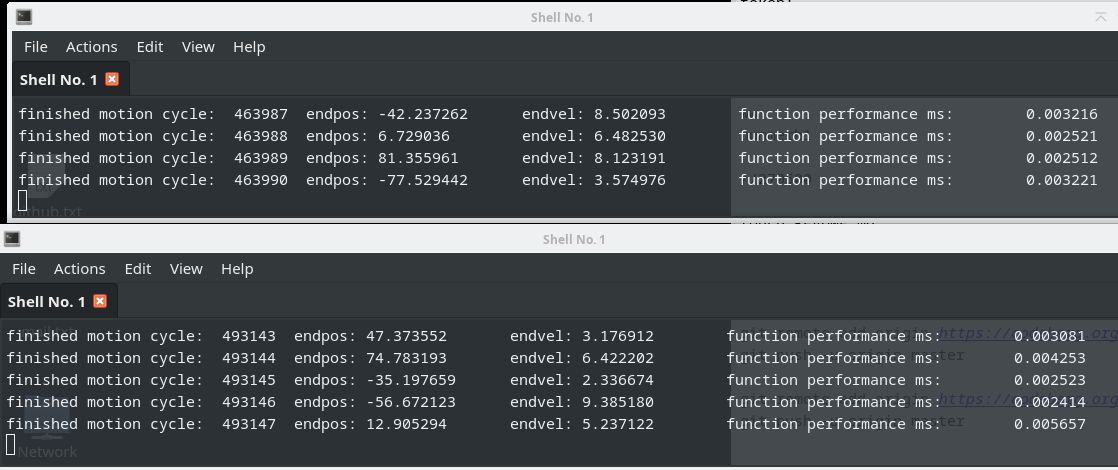
Replied by Grotius on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions

- tenfrozentoes
- tenfrozentoes
23 Oct 2024 20:33
Replied by tenfrozentoes on topic Question on Step 4 of the APT install instructions
Question on Step 4 of the APT install instructions
Category: QtPyVCP
- Grotius
23 Oct 2024 20:17
Replied by Grotius on topic c++ compiling error
c++ compiling error
Category: Advanced Configuration
- Lcvette

23 Oct 2024 20:13
Replied by Lcvette on topic Probe Basic Buttons Missing
Probe Basic Buttons Missing
Category: QtPyVCP
- trojansf
- trojansf
23 Oct 2024 20:12
Replied by trojansf on topic Linux equivalent to NCPlot
Linux equivalent to NCPlot
Category: CAD CAM
- Grotius
23 Oct 2024 20:05
Replied by Grotius on topic Running halui in real time space?
Running halui in real time space?
Category: HAL
Time to create page: 0.753 seconds