Search Results (Searched for: )
- Muecke

20 Oct 2024 17:52
Replied by Muecke on topic G-Code Verarbeitung: Kurze Pausen zwischen Bewegungen - Wie beschleunigen?
G-Code Verarbeitung: Kurze Pausen zwischen Bewegungen - Wie beschleunigen?
Category: Deutsch
 Ich hoffe, dass ich morgen Abend wieder an die Anlage komme.
Ich hoffe, dass ich morgen Abend wieder an die Anlage komme.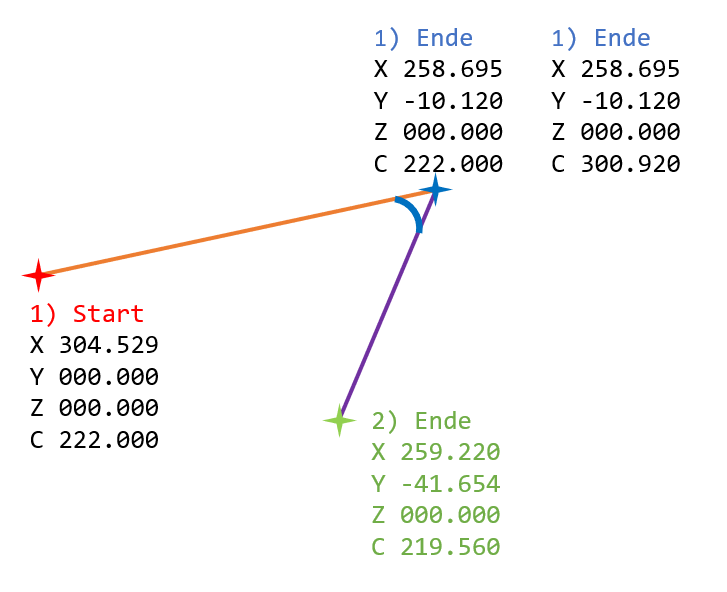
- tommylight

20 Oct 2024 17:29
Replied by tommylight on topic A strange 5 axis machine detailed build log with limited tools, on youtube
A strange 5 axis machine detailed build log with limited tools, on youtube
Category: Show Your Stuff
- Lcvette

20 Oct 2024 16:41
Replied by Lcvette on topic Version aktualisieren + diverse Fehlermeldungen
Version aktualisieren + diverse Fehlermeldungen
Category: QtPyVCP
- Jensner
- Jensner
20 Oct 2024 16:37
Replied by Jensner on topic Version aktualisieren + diverse Fehlermeldungen
Version aktualisieren + diverse Fehlermeldungen
Category: QtPyVCP
- Lcvette
20 Oct 2024 16:30
Replied by Lcvette on topic Add setting to toggle display of one or two file managers in Probe Basic
Add setting to toggle display of one or two file managers in Probe Basic
Category: QtPyVCP
- PCW

20 Oct 2024 16:27
Replied by PCW on topic How to configure THCAD2 encoder on Z axis on 7i96s board?
How to configure THCAD2 encoder on Z axis on 7i96s board?
Category: HAL Examples
- Lcvette
20 Oct 2024 16:19
Replied by Lcvette on topic Version aktualisieren + diverse Fehlermeldungen
Version aktualisieren + diverse Fehlermeldungen
Category: QtPyVCP
- Lcvette
20 Oct 2024 16:18
- Lcvette
20 Oct 2024 16:15
Replied by Lcvette on topic ProbeBasic Spindle connection (No Speed indicated, no control possible)
ProbeBasic Spindle connection (No Speed indicated, no control possible)
Category: QtPyVCP
- Jensner
- Jensner
20 Oct 2024 15:46
Replied by Jensner on topic Add setting to toggle display of one or two file managers in Probe Basic
Add setting to toggle display of one or two file managers in Probe Basic
Category: QtPyVCP
- programador

20 Oct 2024 15:44 - 20 Oct 2024 15:57
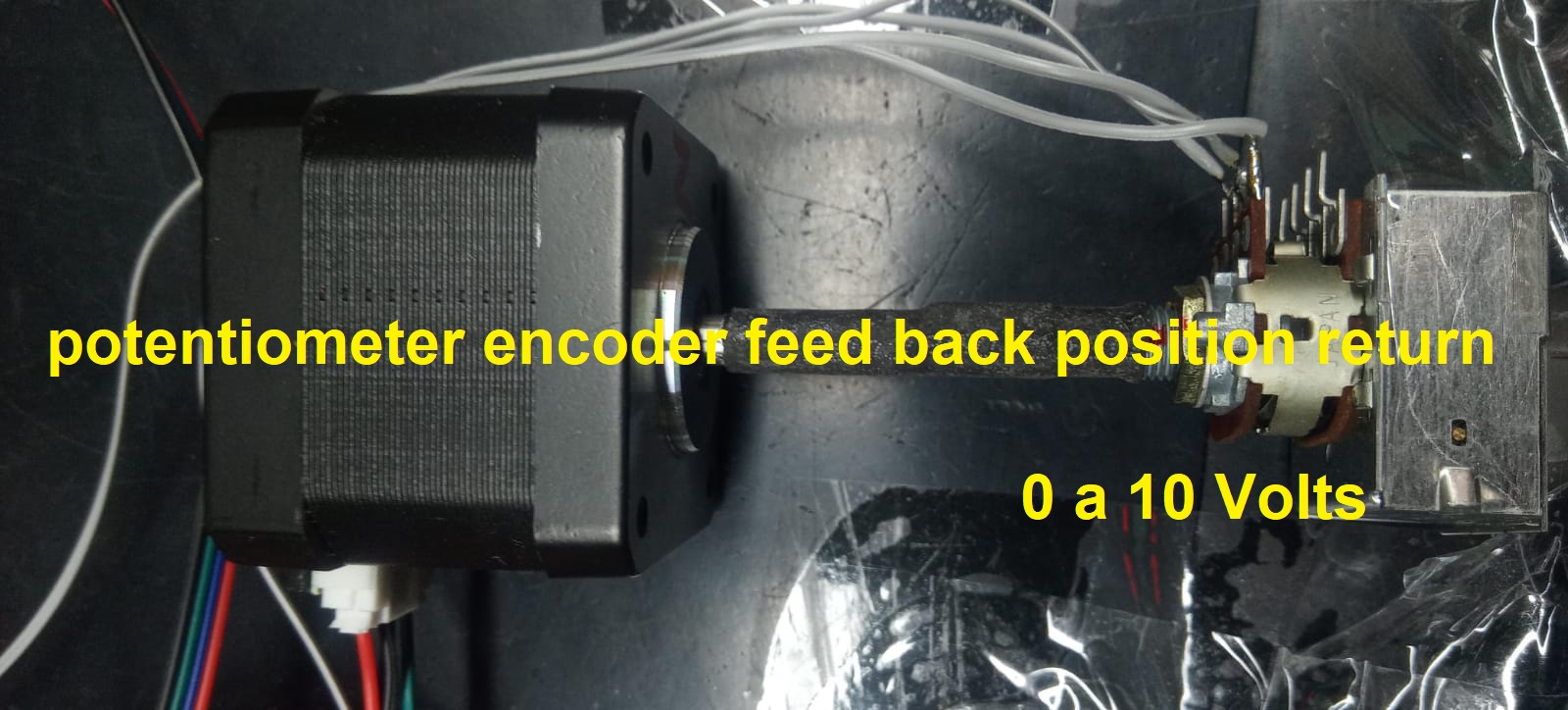
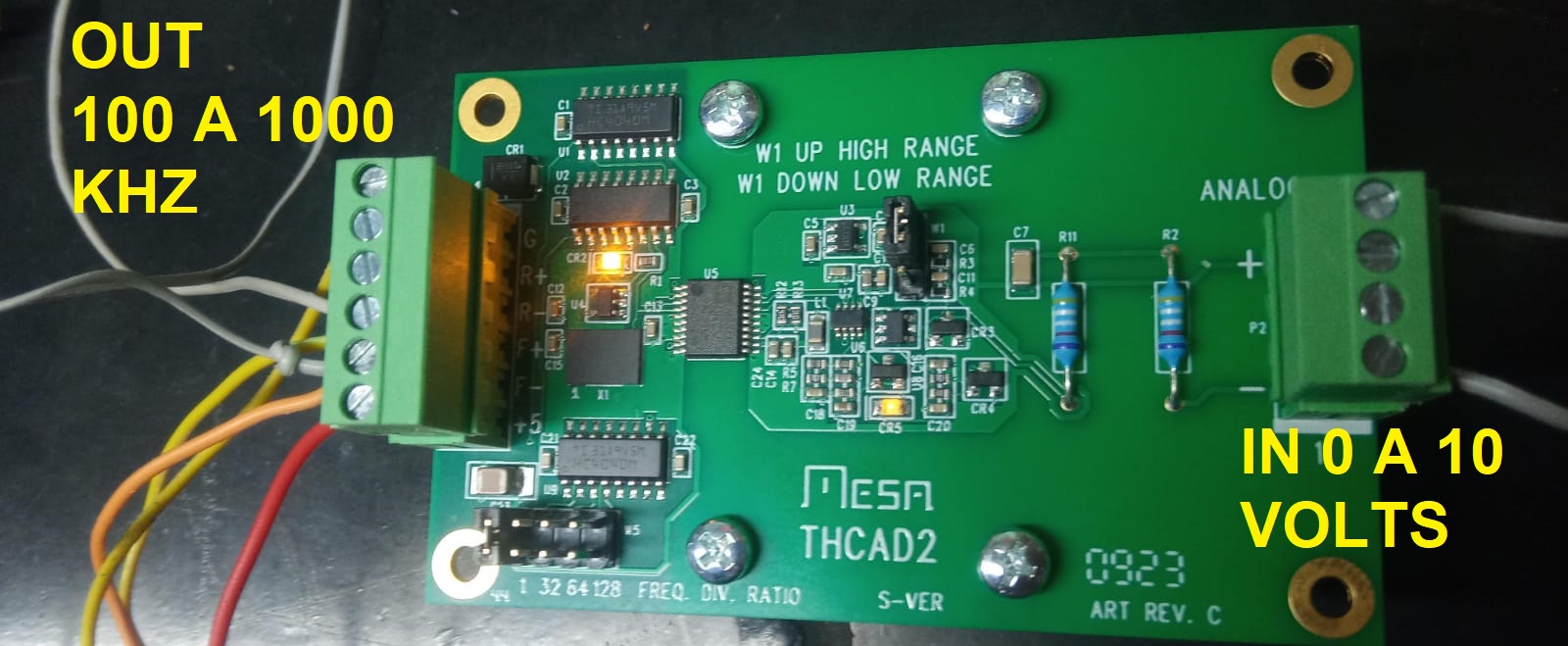
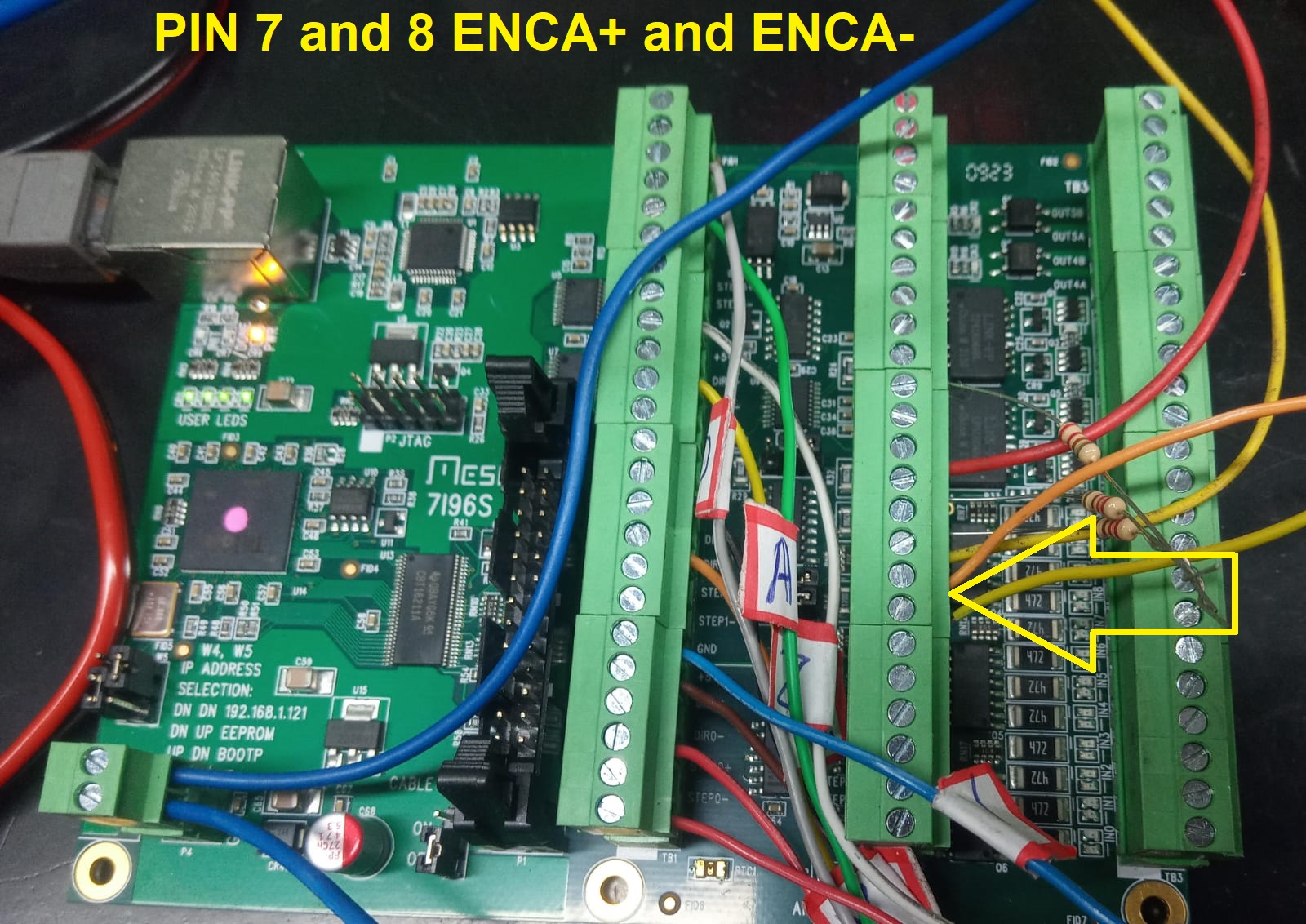
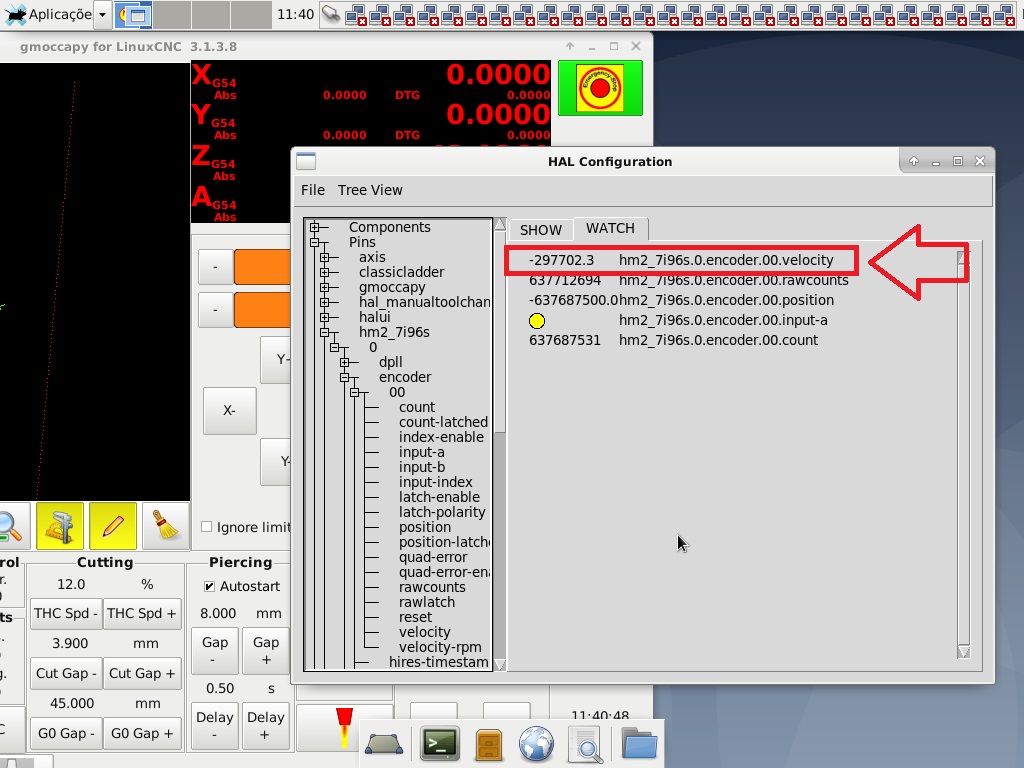
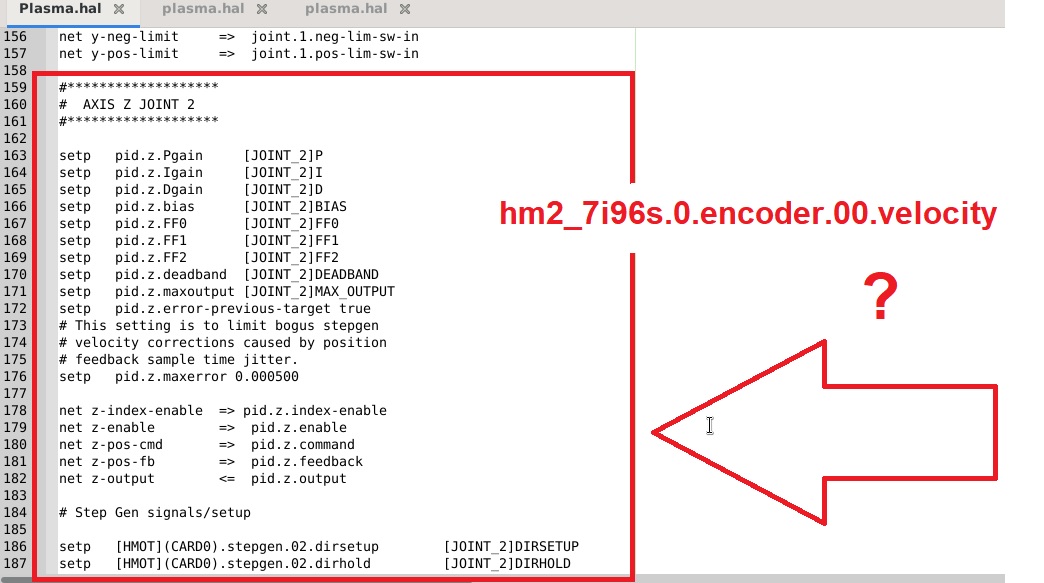
How to configure THCAD2 encoder on Z axis on 7i96s board? was created by programador
How to configure THCAD2 encoder on Z axis on 7i96s board?
Category: HAL Examples
{kind=link}
- Aciera

20 Oct 2024 15:34 - 21 Oct 2024 07:29
Replied by Aciera on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions
- Aciera
20 Oct 2024 15:23 - 21 Oct 2024 07:04
Replied by Aciera on topic Rotating A axis using TCP
Rotating A axis using TCP
Category: Advanced Configuration
- Aciera
20 Oct 2024 15:17
Replied by Aciera on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions
- PCW
20 Oct 2024 14:59
Replied by PCW on topic LinuxCNC with 7i95 stopped working
LinuxCNC with 7i95 stopped working
Category: Driver Boards
Time to create page: 0.464 seconds