Search Results (Searched for: )
- Aciera

13 Sep 2024 13:34 - 13 Sep 2024 13:46
Replied by Aciera on topic Python - yield INTERP_EXECUTE_FINISH
Python - yield INTERP_EXECUTE_FINISH
Category: General LinuxCNC Questions
- zz912

13 Sep 2024 13:28
Replied by zz912 on topic Python - yield INTERP_EXECUTE_FINISH
Python - yield INTERP_EXECUTE_FINISH
Category: General LinuxCNC Questions
- bertoldo
- bertoldo
13 Sep 2024 13:22
Replied by bertoldo on topic Problems with Lichuan Ethercat servo drive
Problems with Lichuan Ethercat servo drive
Category: EtherCAT
- rockcnc
- rockcnc
13 Sep 2024 13:15
Replied by rockcnc on topic Python - yield INTERP_EXECUTE_FINISH
Python - yield INTERP_EXECUTE_FINISH
Category: General LinuxCNC Questions
- Aciera
13 Sep 2024 13:07
- the_erk
- the_erk
13 Sep 2024 13:05
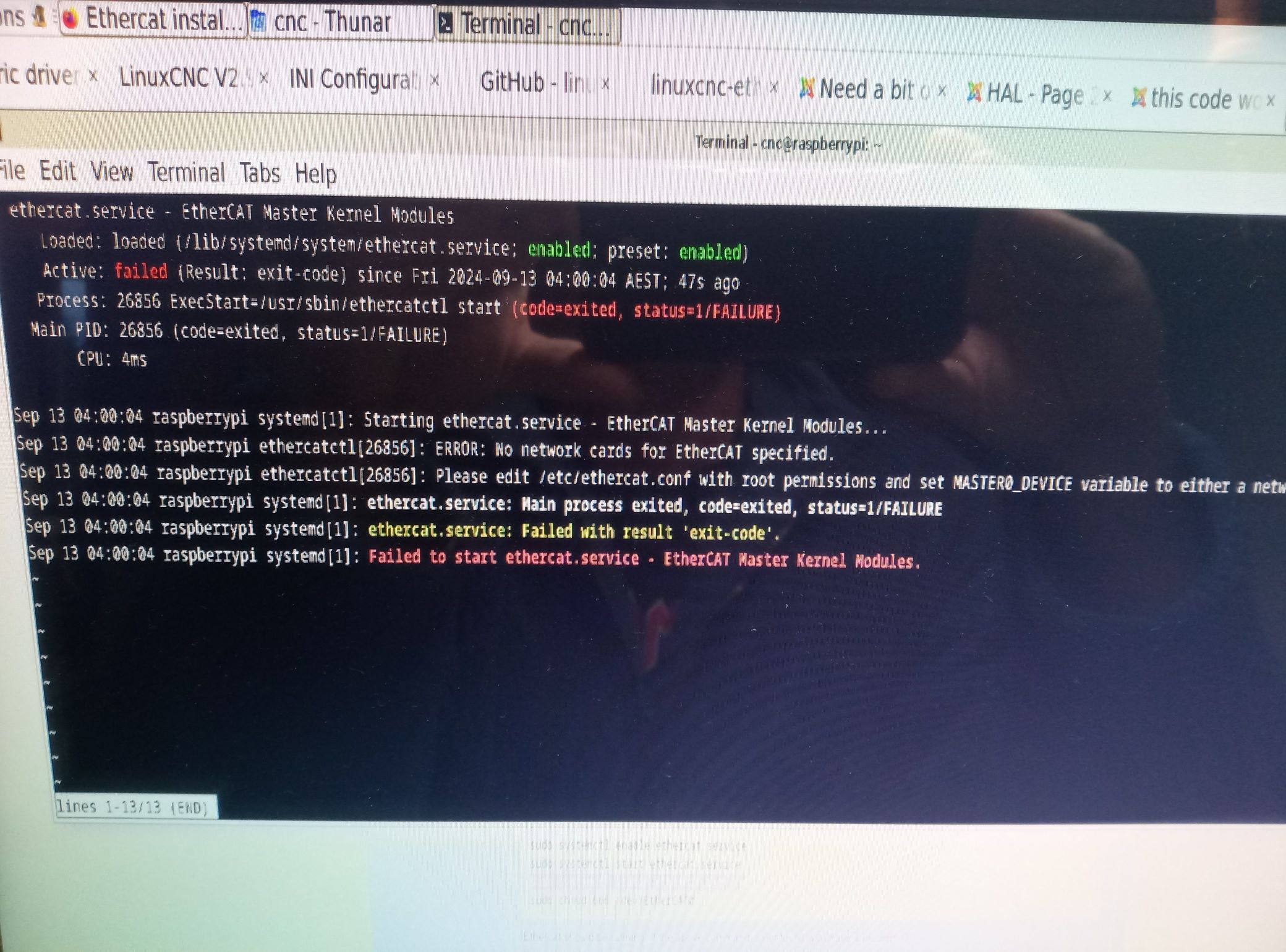
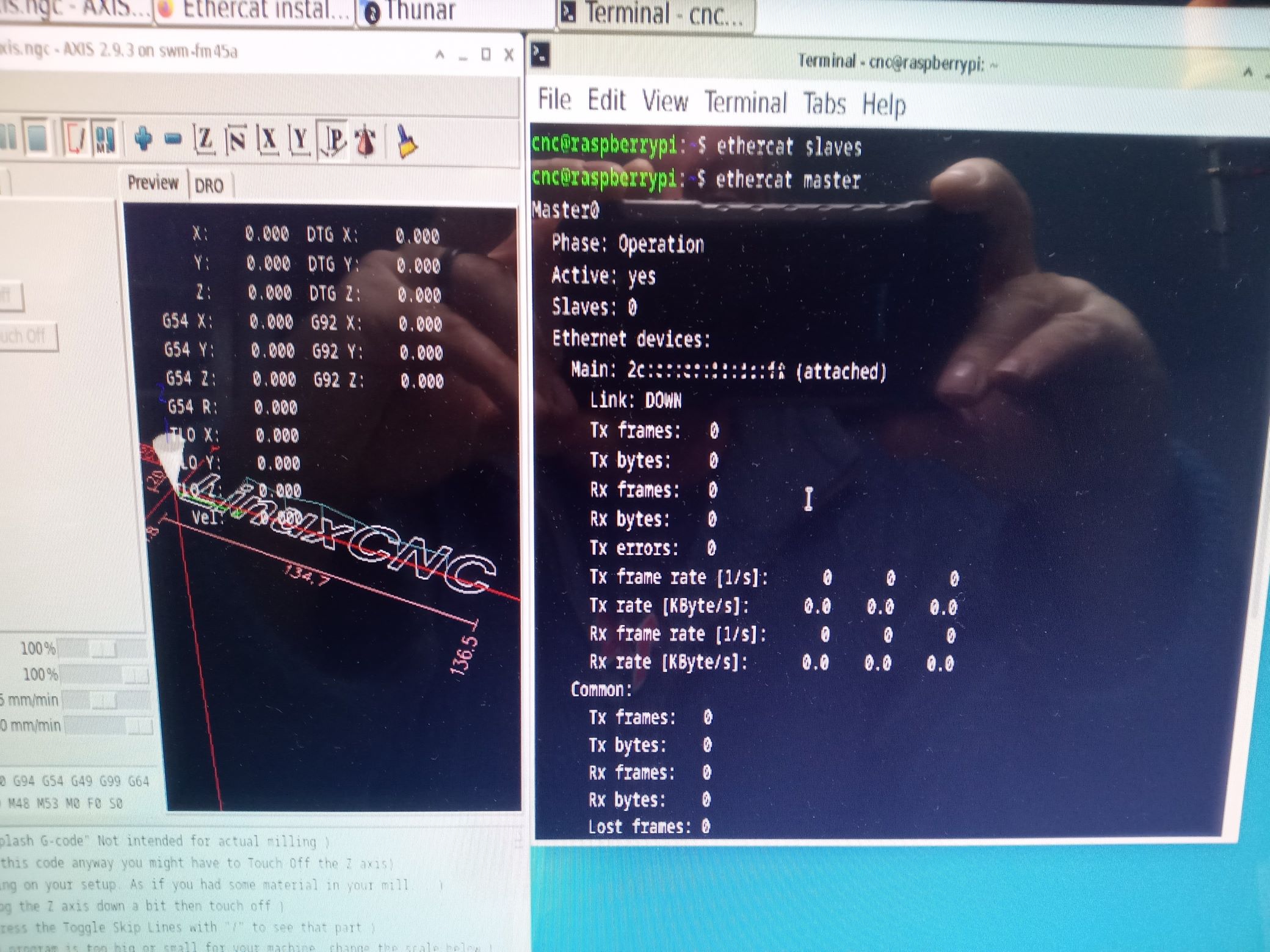
Replied by the_erk on topic Linux beginner RPI 5, GPIO + ethercat 4 axis adventure
Linux beginner RPI 5, GPIO + ethercat 4 axis adventure
Category: Basic Configuration


- my1987toyota

13 Sep 2024 13:02
Replied by my1987toyota on topic 3D printed stuff, showcase it here
3D printed stuff, showcase it here
Category: Additive Manufacturing

- ekbiker
- ekbiker
13 Sep 2024 12:58
Replied by ekbiker on topic ClearPath SDSK Usb port monitoring
ClearPath SDSK Usb port monitoring
Category: General LinuxCNC Questions
- rockcnc
- rockcnc
13 Sep 2024 12:56
- G0G53Z148

13 Sep 2024 12:32
- zz912
13 Sep 2024 12:27
Replied by zz912 on topic Python - yield INTERP_EXECUTE_FINISH
Python - yield INTERP_EXECUTE_FINISH
Category: General LinuxCNC Questions
- rockcnc
- rockcnc
13 Sep 2024 12:23
Replied by rockcnc on topic Python - yield INTERP_EXECUTE_FINISH
Python - yield INTERP_EXECUTE_FINISH
Category: General LinuxCNC Questions
- zz912
13 Sep 2024 12:07
Replied by zz912 on topic Python - yield INTERP_EXECUTE_FINISH
Python - yield INTERP_EXECUTE_FINISH
Category: General LinuxCNC Questions
- rockcnc
- rockcnc
13 Sep 2024 11:59
Replied by rockcnc on topic Python - yield INTERP_EXECUTE_FINISH
Python - yield INTERP_EXECUTE_FINISH
Category: General LinuxCNC Questions
- Aciera
13 Sep 2024 11:55
Time to create page: 0.497 seconds