Search Results (Searched for: )
- Doc_emmet
- Doc_emmet
18 May 2025 14:15
Replied by Doc_emmet on topic Activate B-axis in Porbe Basic
Activate B-axis in Porbe Basic
Category: QtPyVCP
- PCW

18 May 2025 14:07 - 18 May 2025 14:09
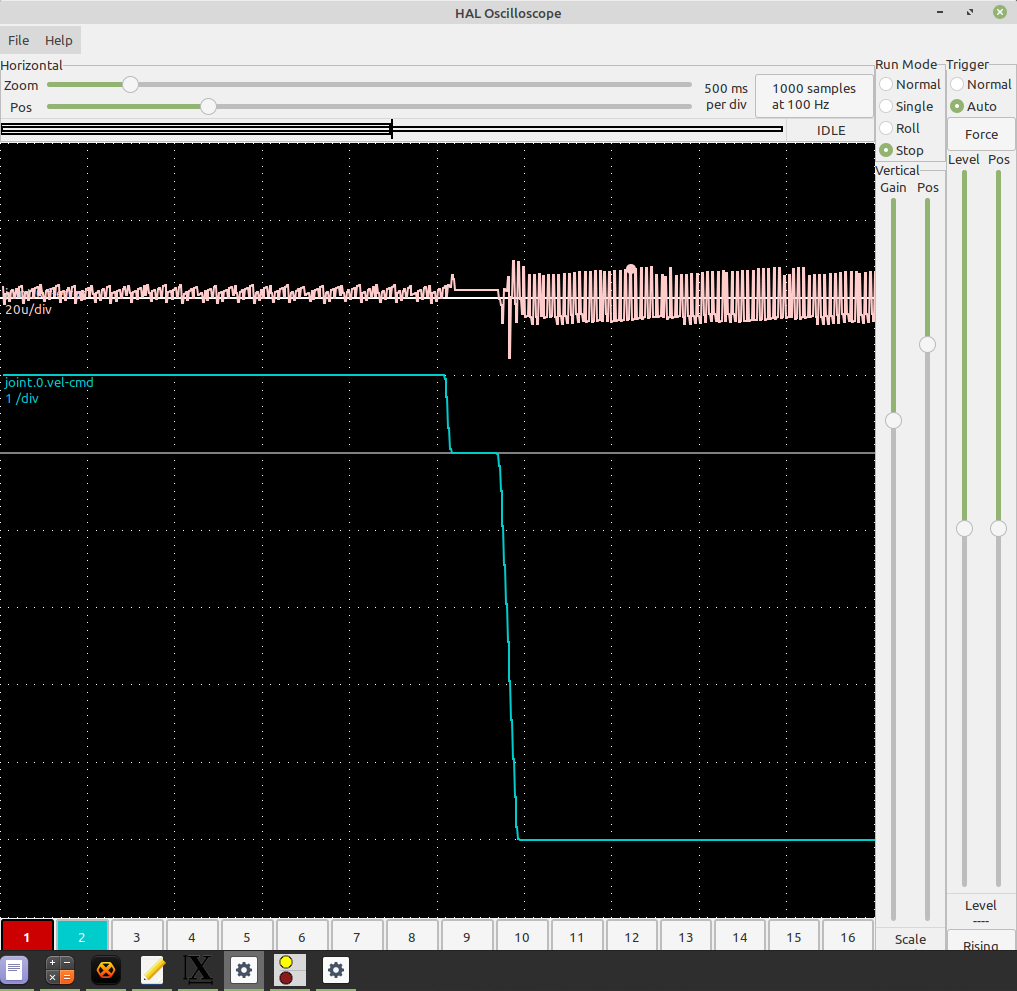
Replied by PCW on topic Effect of lengthening the servo thread period?
Effect of lengthening the servo thread period?
Category: Basic Configuration
- Giovanni
- Giovanni
18 May 2025 13:32
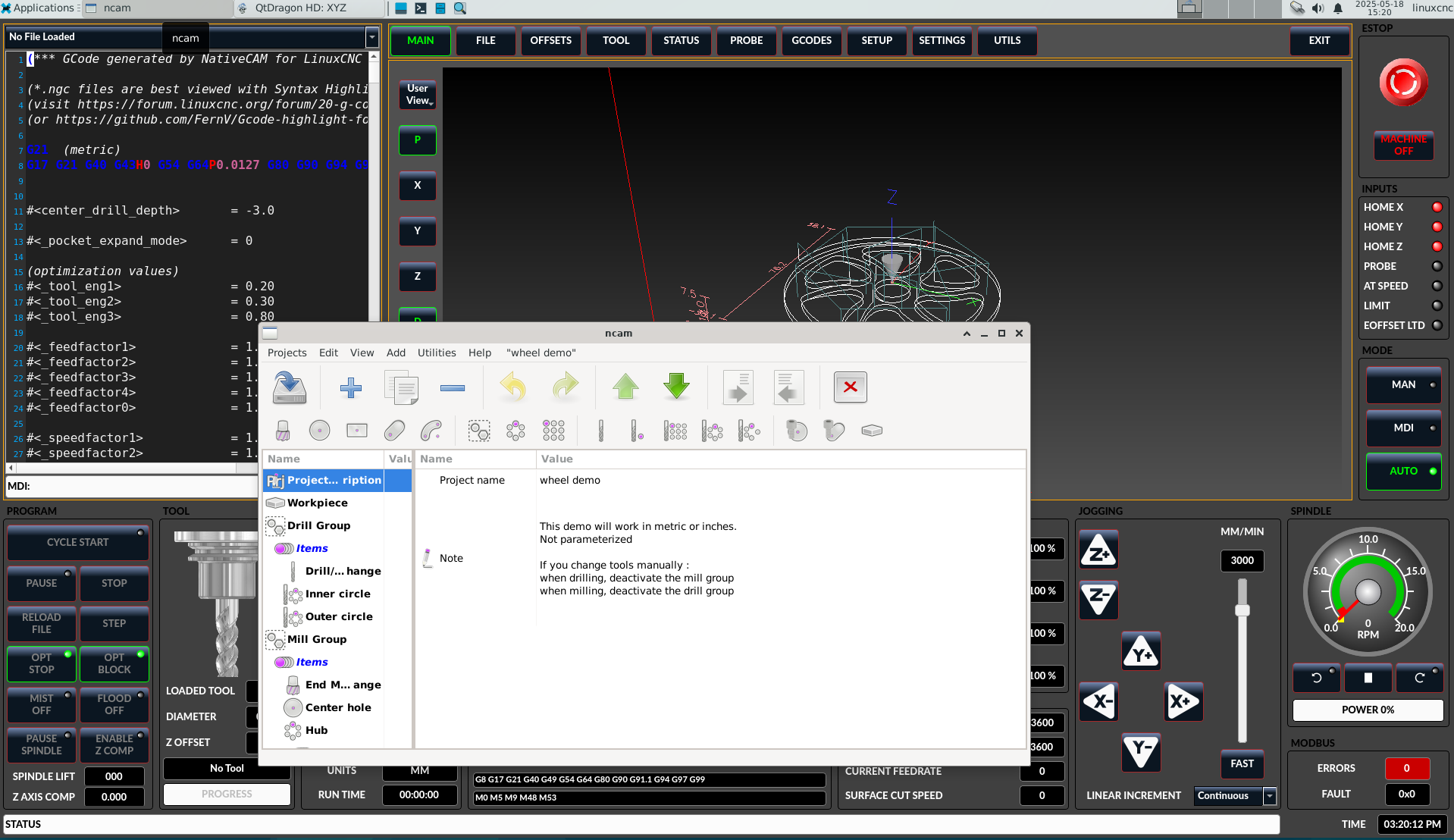
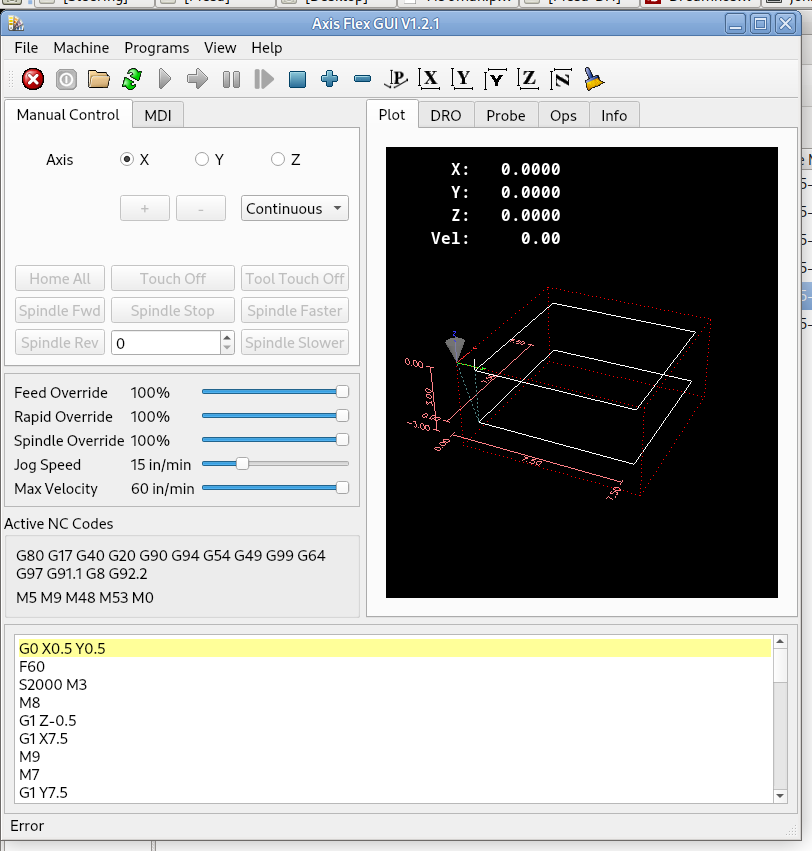
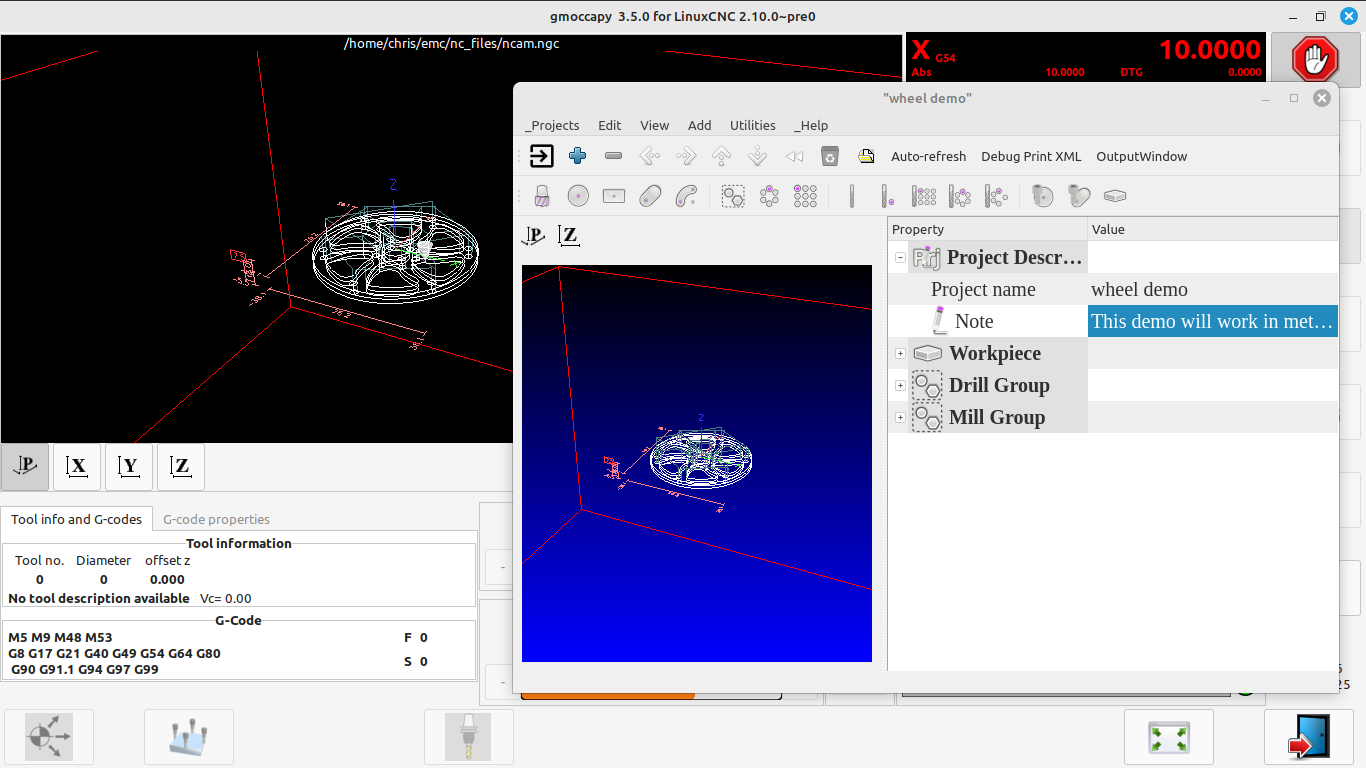
Replied by Giovanni on topic NativeCam on LinuxCNC 2.9.3
NativeCam on LinuxCNC 2.9.3
Category: NativeCAM
- Giovanni
- Giovanni
18 May 2025 13:16
Replied by Giovanni on topic NativeCam on LinuxCNC 2.9.3
NativeCam on LinuxCNC 2.9.3
Category: NativeCAM
- JT

18 May 2025 12:59
- MarkoPolo
- MarkoPolo
18 May 2025 12:49
Replied by MarkoPolo on topic Error in tool_offsetview.py
Error in tool_offsetview.py
Category: Qtvcp
- cmorley
- cmorley
18 May 2025 12:23
Replied by cmorley on topic NativeCam on LinuxCNC 2.9.3
NativeCam on LinuxCNC 2.9.3
Category: NativeCAM

- pgf
- pgf
18 May 2025 12:06
Replied by pgf on topic Effect of lengthening the servo thread period?
Effect of lengthening the servo thread period?
Category: Basic Configuration
- JT
18 May 2025 11:57
Replied by JT on topic [SOLVED] MesaCT problems with 7i96 pwm spindle
[SOLVED] MesaCT problems with 7i96 pwm spindle
Category: Configuration Tools
- cmorley
- cmorley
18 May 2025 11:54
- meister
- meister
18 May 2025 10:42
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Giovanni
- Giovanni
18 May 2025 10:42 - 18 May 2025 20:36
Replied by Giovanni on topic NativeCam on LinuxCNC 2.9.3
NativeCam on LinuxCNC 2.9.3
Category: NativeCAM
- cmorley
- cmorley
18 May 2025 10:23
Replied by cmorley on topic NativeCam on LinuxCNC 2.9.3
NativeCam on LinuxCNC 2.9.3
Category: NativeCAM
- MarkoPolo
- MarkoPolo
18 May 2025 09:59
Replied by MarkoPolo on topic Error in tool_offsetview.py
Error in tool_offsetview.py
Category: Qtvcp
- alangibson
- alangibson
18 May 2025 09:08
Replied by alangibson on topic Ohmic probe aborts immediately
Ohmic probe aborts immediately
Category: Plasmac
Time to create page: 0.464 seconds