Search Results (Searched for: )
- alpri0265
- alpri0265
17 Aug 2025 15:02
Replied by alpri0265 on topic Request for firmware bitfile for Mesa 7i90HD + 7i85S (3 axes, encoders, PWM)
Request for firmware bitfile for Mesa 7i90HD + 7i85S (3 axes, encoders, PWM)
Category: Driver Boards
- Surmetall

17 Aug 2025 14:47 - 17 Aug 2025 14:50
Replied by Surmetall on topic NativeCam on LinuxCNC 2.9.3
NativeCam on LinuxCNC 2.9.3
Category: NativeCAM
")
- PCW

17 Aug 2025 14:31 - 17 Aug 2025 14:32
- PCW
17 Aug 2025 14:07
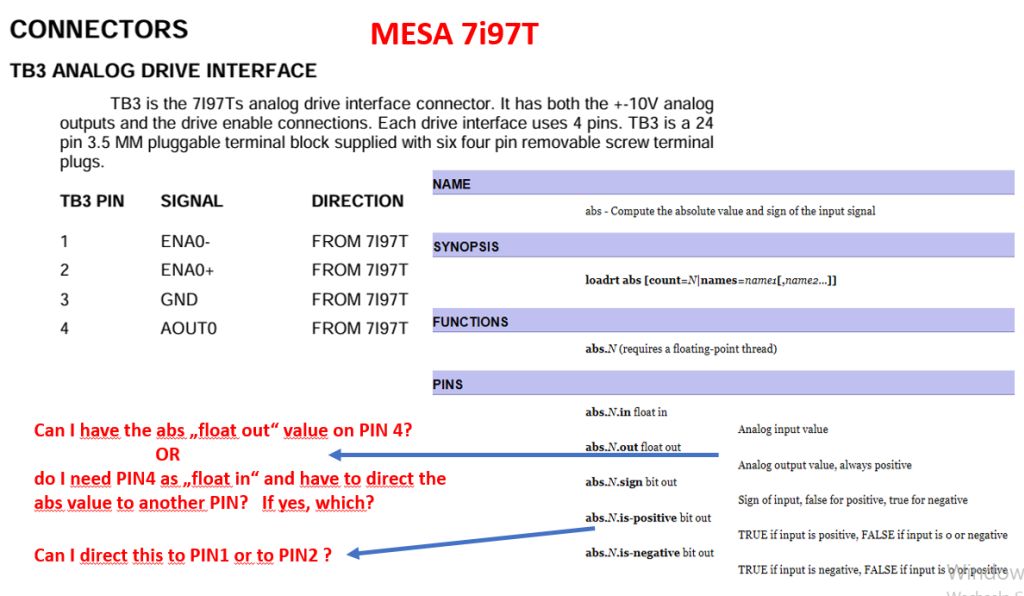
Replied by PCW on topic MESA 7i97 - connection of DC Tach-Motors (2)
MESA 7i97 - connection of DC Tach-Motors (2)
Category: General LinuxCNC Questions
- machinedude

17 Aug 2025 14:03
Replied by machinedude on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
Category: QtPyVCP
- alpri0265
- alpri0265
17 Aug 2025 12:33
Replied by alpri0265 on topic Request for firmware bitfile for Mesa 7i90HD + 7i85S (3 axes, encoders, PWM)
Request for firmware bitfile for Mesa 7i90HD + 7i85S (3 axes, encoders, PWM)
Category: Driver Boards
- tommylight

17 Aug 2025 12:17
Replied by tommylight on topic NativeCam on LinuxCNC 2.9.3
NativeCam on LinuxCNC 2.9.3
Category: NativeCAM
- Asymmetrisch
- Asymmetrisch
17 Aug 2025 12:16
Replied by Asymmetrisch on topic Problem bei installation Ethercat
Problem bei installation Ethercat
Category: Deutsch
- tommylight
17 Aug 2025 12:14
Replied by tommylight on topic Request for firmware bitfile for Mesa 7i90HD + 7i85S (3 axes, encoders, PWM)
Request for firmware bitfile for Mesa 7i90HD + 7i85S (3 axes, encoders, PWM)
Category: Driver Boards
- Hartwig
- Hartwig
17 Aug 2025 12:14
Replied by Hartwig on topic MESA 7i97 - connection of DC Tach-Motors (2)
MESA 7i97 - connection of DC Tach-Motors (2)
Category: General LinuxCNC Questions
- alpri0265
- alpri0265
17 Aug 2025 11:49
Replied by alpri0265 on topic Request for firmware bitfile for Mesa 7i90HD + 7i85S (3 axes, encoders, PWM)
Request for firmware bitfile for Mesa 7i90HD + 7i85S (3 axes, encoders, PWM)
Category: Driver Boards
- endian

17 Aug 2025 10:46
Replied by endian on topic Ethercat AX5206 stuck in SAFEOP
Ethercat AX5206 stuck in SAFEOP
Category: EtherCAT
- tommylight
17 Aug 2025 10:39
Replied by tommylight on topic Request for firmware bitfile for Mesa 7i90HD + 7i85S (3 axes, encoders, PWM)
Request for firmware bitfile for Mesa 7i90HD + 7i85S (3 axes, encoders, PWM)
Category: Driver Boards
- Surmetall
17 Aug 2025 09:29
Replied by Surmetall on topic NativeCam on LinuxCNC 2.9.3
NativeCam on LinuxCNC 2.9.3
Category: NativeCAM
- alpri0265
- alpri0265
17 Aug 2025 09:25
Time to create page: 1.068 seconds