Search Results (Searched for: )
- tommylight

13 Aug 2024 00:53
Replied by tommylight on topic Joint Amplifier Fault on Non-Moving Axis
Joint Amplifier Fault on Non-Moving Axis
Category: Basic Configuration
- JamesHoward
- JamesHoward
13 Aug 2024 00:48
Replied by JamesHoward on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Category: Driver Boards
- Benb

12 Aug 2024 22:52
Replied by Benb on topic MCG Server Controller for 4th axis
MCG Server Controller for 4th axis
Category: Driver Boards
- cakeslob
- cakeslob
12 Aug 2024 22:40
- rodw

12 Aug 2024 21:23
Replied by rodw on topic Pi4b and Pi5 users - What should go in a 2.9.3 image
Pi4b and Pi5 users - What should go in a 2.9.3 image
Category: Installing LinuxCNC
- Mecanix
- Mecanix
12 Aug 2024 21:04
Replied by Mecanix on topic Y axis configuration
Y axis configuration
Category: General LinuxCNC Questions
- cakeslob
- cakeslob
12 Aug 2024 21:04
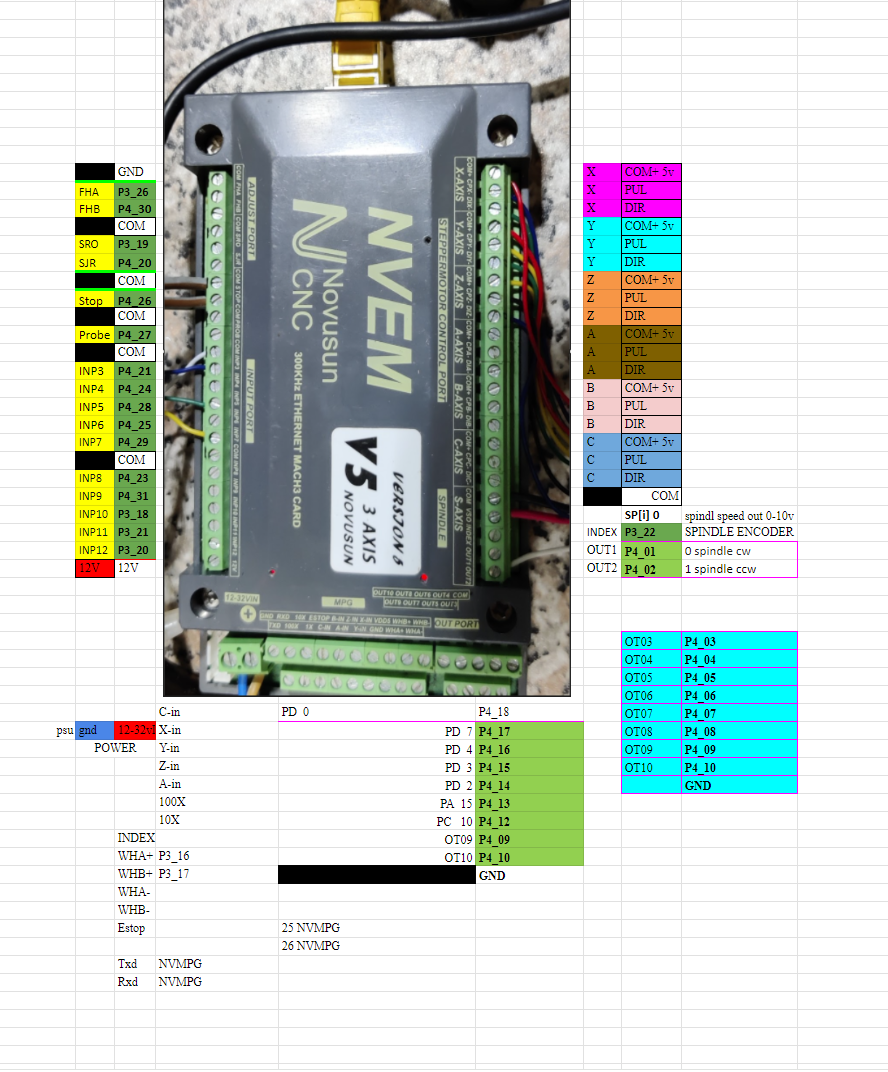
Replied by cakeslob on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- Ismacr63
- Ismacr63
12 Aug 2024 20:56
Replied by Ismacr63 on topic Y axis configuration
Y axis configuration
Category: General LinuxCNC Questions
- cakeslob
- cakeslob
12 Aug 2024 20:56
Replied by cakeslob on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
")
- Mecanix
- Mecanix
12 Aug 2024 20:47
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- scotta

12 Aug 2024 20:38 - 12 Aug 2024 20:38
- Mecanix
- Mecanix
12 Aug 2024 20:34 - 12 Aug 2024 20:35
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware

- meister
- meister
12 Aug 2024 20:22
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Limo
- Limo
12 Aug 2024 20:18
- AlessandroEmm
- AlessandroEmm
12 Aug 2024 20:11
Replied by AlessandroEmm on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
Time to create page: 0.537 seconds