Search Results (Searched for: )
- Lcvette

14 Apr 2026 15:35 - 14 Apr 2026 15:35
Replied by Lcvette on topic Probe Basic and XHC-WHB04B-6 jogging issue
Probe Basic and XHC-WHB04B-6 jogging issue
Category: QtPyVCP
- mclien
- mclien
14 Apr 2026 15:14
retrofitting a Proxon for coin die milling was created by mclien
retrofitting a Proxon for coin die milling
Category: Milling Machines
- spumco
- spumco
14 Apr 2026 14:28
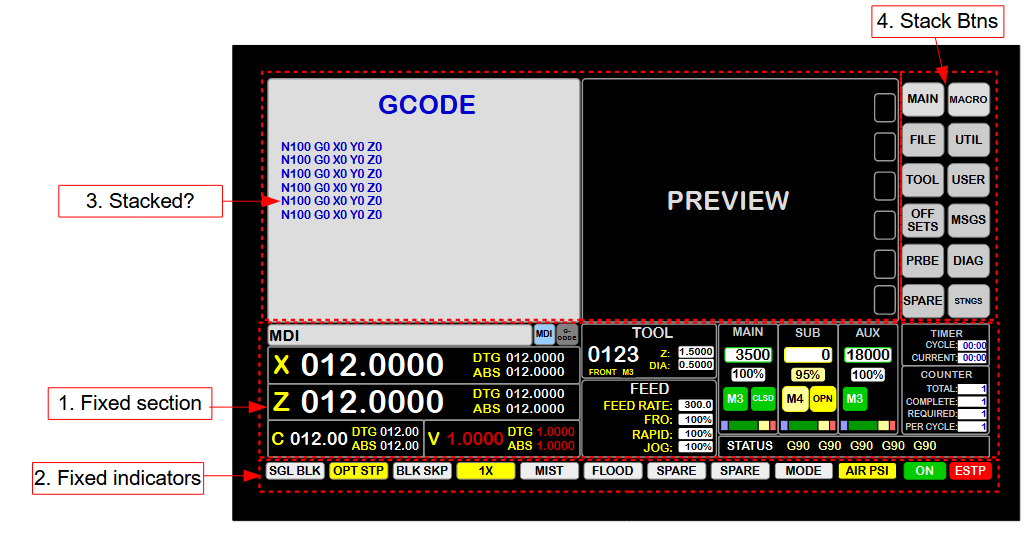
FlexGUI first attempt - basic layout? was created by spumco
FlexGUI first attempt - basic layout?
Category: Flex GUI
- tommylight

14 Apr 2026 13:52
Replied by tommylight on topic My Z-axis stopped moving
My Z-axis stopped moving
Category: General LinuxCNC Questions
- rodw

14 Apr 2026 12:39
Replied by rodw on topic Hello to all, I am new here
Hello to all, I am new here
Category: General LinuxCNC Questions
- erikfriesen
- erikfriesen
14 Apr 2026 12:28
- rodw
14 Apr 2026 12:25
Replied by rodw on topic SIEG SX3.5Z Drivers EtherCAT A6 Steppers
SIEG SX3.5Z Drivers EtherCAT A6 Steppers
Category: Driver Boards
- juan13372k
- juan13372k
14 Apr 2026 11:40
Replied by juan13372k on topic SIEG SX3.5Z Drivers EtherCAT A6 Steppers
SIEG SX3.5Z Drivers EtherCAT A6 Steppers
Category: Driver Boards

- rodw
14 Apr 2026 11:32
Replied by rodw on topic New Laser Build - raster engraving
New Laser Build - raster engraving
Category: Plasma & Laser
- rodw
14 Apr 2026 11:28
Replied by rodw on topic HAL component for tangential knife
HAL component for tangential knife
Category: HAL
- axemas

14 Apr 2026 11:27 - 21 Apr 2026 10:34
- grandixximo

14 Apr 2026 11:02 - 14 Apr 2026 11:03
Replied by grandixximo on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
- papagno-source
- papagno-source
14 Apr 2026 10:53
Replied by papagno-source on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
- rodw
14 Apr 2026 10:17
- Dudelbert
- Dudelbert
14 Apr 2026 09:49
My Z-axis stopped moving was created by Dudelbert
My Z-axis stopped moving
Category: General LinuxCNC Questions
Time to create page: 0.318 seconds