Search Results (Searched for: )
- tommylight

26 Mar 2026 13:11
Replied by tommylight on topic Leave enabled pin active when leaving linuxcnc
Leave enabled pin active when leaving linuxcnc
Category: Basic Configuration
")
- billykid

26 Mar 2026 12:45
Replied by billykid on topic xhc-hb04 does not communicate
xhc-hb04 does not communicate
Category: General LinuxCNC Questions
- Spezidrohne
- Spezidrohne
26 Mar 2026 12:40
Ethercat Setup help needed for beginner was created by Spezidrohne
Ethercat Setup help needed for beginner
Category: EtherCAT
- alangibson
- alangibson
26 Mar 2026 12:39
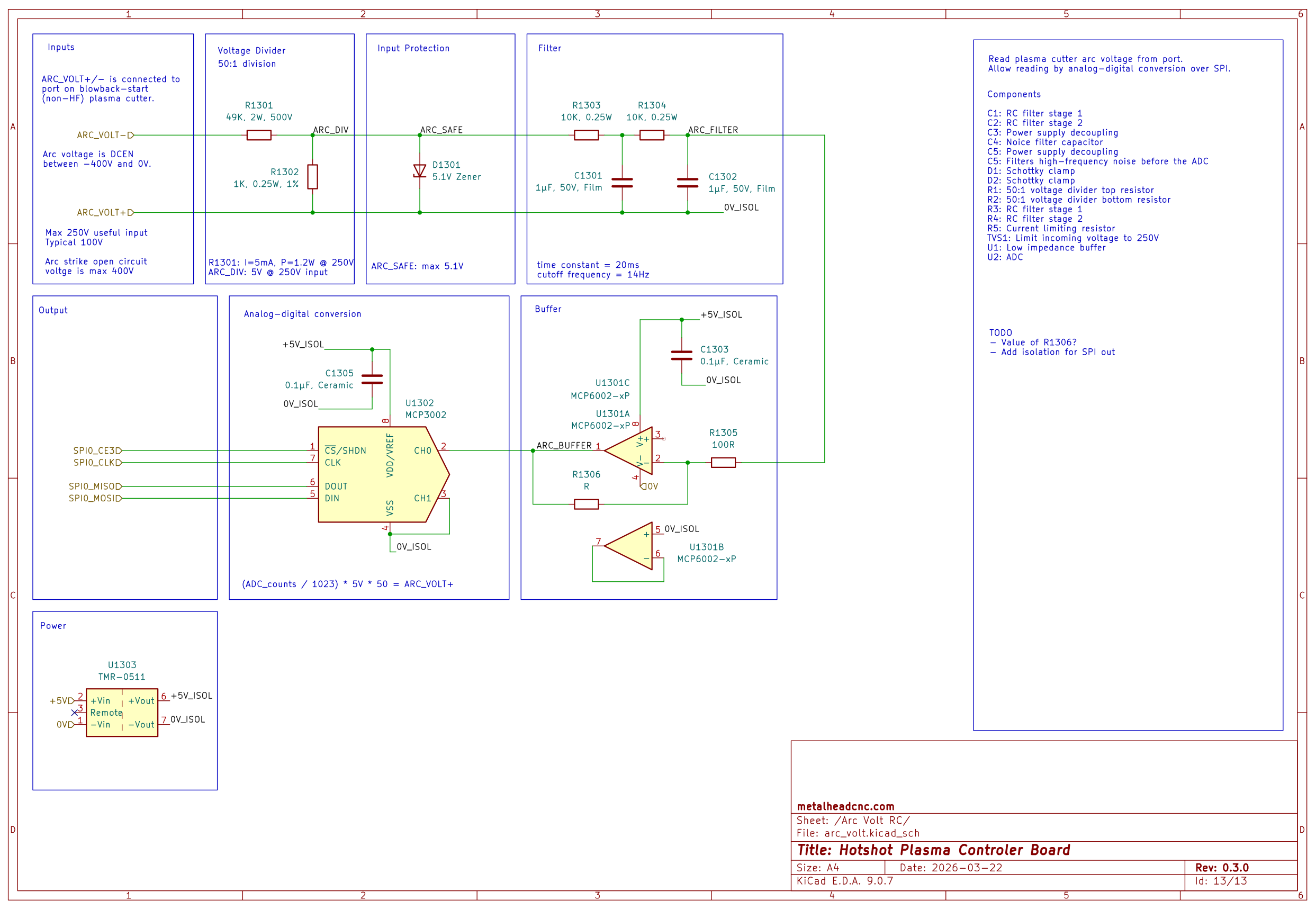
Replied by alangibson on topic Review Request for Arc Volt Sensor Schematic
Review Request for Arc Volt Sensor Schematic
Category: Plasma & Laser
- abs32
- abs32
26 Mar 2026 12:08
Replied by abs32 on topic Probe tripped during non-probe move deadlock
Probe tripped during non-probe move deadlock
Category: General LinuxCNC Questions
- abs32
- abs32
26 Mar 2026 12:06 - 26 Mar 2026 12:09
- rodw

26 Mar 2026 11:58
Replied by rodw on topic Leave enabled pin active when leaving linuxcnc
Leave enabled pin active when leaving linuxcnc
Category: Basic Configuration
- rodw
26 Mar 2026 11:56
Replied by rodw on topic too long hm2_7i97.0.read.tmax or something else?
too long hm2_7i97.0.read.tmax or something else?
Category: Driver Boards
- mooser
- mooser
26 Mar 2026 11:29
Leave enabled pin active when leaving linuxcnc was created by mooser
Leave enabled pin active when leaving linuxcnc
Category: Basic Configuration
- spumco
- spumco
26 Mar 2026 10:43
Replied by spumco on topic Toolchanger HAL Component project
Toolchanger HAL Component project
Category: HAL Examples
- m0602232
- m0602232
26 Mar 2026 10:13
Replied by m0602232 on topic too long hm2_7i97.0.read.tmax or something else?
too long hm2_7i97.0.read.tmax or something else?
Category: Driver Boards
- rodw
26 Mar 2026 09:45
Replied by rodw on topic too long hm2_7i97.0.read.tmax or something else?
too long hm2_7i97.0.read.tmax or something else?
Category: Driver Boards
- rodw
26 Mar 2026 09:30
- Aciera

26 Mar 2026 09:17
Replied by Aciera on topic Where is discussion for my new comp
Where is discussion for my new comp
Category: General LinuxCNC Questions
- rodw
26 Mar 2026 09:11 - 26 Mar 2026 09:12
Replied by rodw on topic Where is discussion for my new comp
Where is discussion for my new comp
Category: General LinuxCNC Questions
Time to create page: 0.771 seconds