Search Results (Searched for: )
- GFC
- GFC
23 Jul 2026 19:02
Replied by GFC on topic Integrating ethercat with QTplasmaC and Beckhoff modules
Integrating ethercat with QTplasmaC and Beckhoff modules
Category: EtherCAT



- Aciera

23 Jul 2026 19:00
Replied by Aciera on topic Gmoccapy tool table not accepting lathe tool angles...
Gmoccapy tool table not accepting lathe tool angles...
Category: Gmoccapy
- GFC
- GFC
23 Jul 2026 18:59
Integrating ethercat with QTplasmaC and Beckhoff modules was created by GFC
Integrating ethercat with QTplasmaC and Beckhoff modules
Category: EtherCAT
- RotarySMP

23 Jul 2026 18:57
Replied by RotarySMP on topic Gmoccapy tool table not accepting lathe tool angles...
Gmoccapy tool table not accepting lathe tool angles...
Category: Gmoccapy
- PCW

23 Jul 2026 18:31
- Kittifix
- Kittifix
23 Jul 2026 15:55
Replied by Kittifix on topic Software für Stepperonline A6 / JSS Motors JSS715N / Synmatic AS 715N
Software für Stepperonline A6 / JSS Motors JSS715N / Synmatic AS 715N
Category: Deutsch
- RLA
- RLA
23 Jul 2026 15:51
Replied by RLA on topic linuxcnc frequent freeze
linuxcnc frequent freeze
Category: General LinuxCNC Questions
- Aciera
23 Jul 2026 15:50 - 23 Jul 2026 16:23
- csec0128
- csec0128
23 Jul 2026 15:44
Replied by csec0128 on topic Precix Retrofit Project
Precix Retrofit Project
Category: Driver Boards
- RLA
- RLA
23 Jul 2026 15:36
Replied by RLA on topic linuxcnc frequent freeze
linuxcnc frequent freeze
Category: General LinuxCNC Questions
- Lcvette

23 Jul 2026 15:24
Replied by Lcvette on topic Some problems with probe basic lathe
Some problems with probe basic lathe
Category: QtPyVCP
- PCW
23 Jul 2026 15:14
Replied by PCW on topic linuxcnc frequent freeze
linuxcnc frequent freeze
Category: General LinuxCNC Questions
- PCW
23 Jul 2026 14:59
- tommylight

23 Jul 2026 14:45
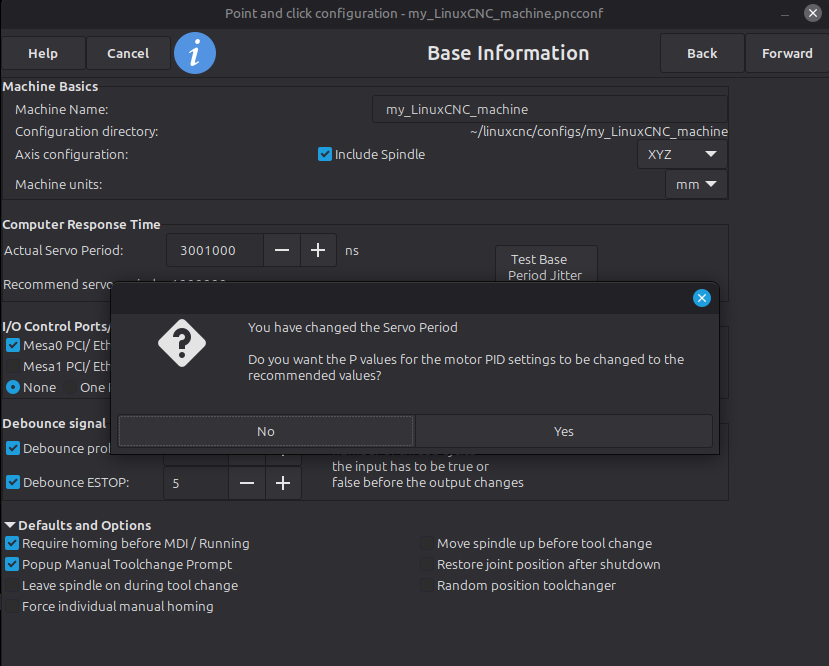
Replied by tommylight on topic If servo period is changed the coresponding P values for PID do not change
If servo period is changed the coresponding P values for PID do not change
Category: PnCConf Wizard
- csec0128
- csec0128
23 Jul 2026 14:15
Replied by csec0128 on topic Precix Retrofit Project
Precix Retrofit Project
Category: Driver Boards
Time to create page: 0.268 seconds