Search Results (Searched for: )
- Sekai
- Sekai
17 Dec 2025 16:11 - 17 Dec 2025 16:22
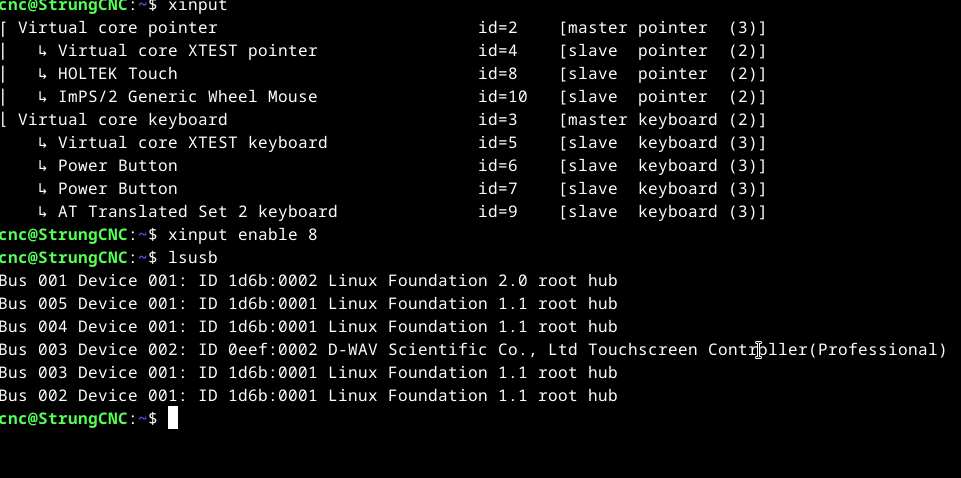
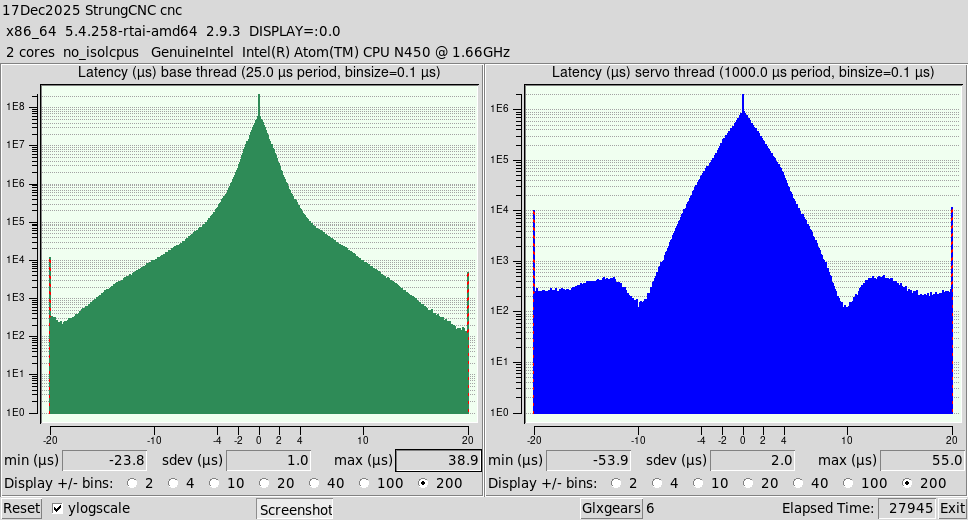
Replied by Sekai on topic Advantech PCM 9362 freze when opening latency-test
Advantech PCM 9362 freze when opening latency-test
Category: Computers and Hardware
- nanowhat
- nanowhat
17 Dec 2025 16:01
Unsupported access to an object was created by nanowhat
Unsupported access to an object
Category: EtherCAT
- DemonClaW
- DemonClaW
17 Dec 2025 14:55
Replied by DemonClaW on topic No linuxcnc widgets in designer
No linuxcnc widgets in designer
Category: Qtvcp
- vibram
- vibram
17 Dec 2025 14:51 - 17 Dec 2025 14:59
Replied by vibram on topic Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Category: EtherCAT
- Hakan
- Hakan
17 Dec 2025 14:34 - 17 Dec 2025 14:37
Replied by Hakan on topic Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Category: EtherCAT
- cmorley
- cmorley
17 Dec 2025 13:58
Replied by cmorley on topic No linuxcnc widgets in designer
No linuxcnc widgets in designer
Category: Qtvcp
- dfarnainekl
- dfarnainekl
17 Dec 2025 12:12
Replied by dfarnainekl on topic Can't get EL4001 to work - all other devices work
Can't get EL4001 to work - all other devices work
Category: EtherCAT
- vibram
- vibram
17 Dec 2025 11:24 - 17 Dec 2025 11:25
Replied by vibram on topic Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Category: EtherCAT
- meister
- meister
17 Dec 2025 09:34
Replied by meister on topic Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Category: EtherCAT
- vibram
- vibram
17 Dec 2025 09:20
Replied by vibram on topic Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Category: EtherCAT
")
- DEVILHUNTER
- DEVILHUNTER
17 Dec 2025 08:23
Replied by DEVILHUNTER on topic MESA 7I76 / 7i76e Model
MESA 7I76 / 7i76e Model
Category: Show Your Stuff
- unknown
- unknown
17 Dec 2025 07:50
Replied by unknown on topic Advantech PCM 9362 freze when opening latency-test
Advantech PCM 9362 freze when opening latency-test
Category: Computers and Hardware
- Sekai
- Sekai
17 Dec 2025 07:29 - 17 Dec 2025 07:42
Replied by Sekai on topic Advantech PCM 9362 freze when opening latency-test
Advantech PCM 9362 freze when opening latency-test
Category: Computers and Hardware
- Sekai
- Sekai
17 Dec 2025 06:17
Replied by Sekai on topic Advantech PCM 9362 freze when opening latency-test
Advantech PCM 9362 freze when opening latency-test
Category: Computers and Hardware
- zoeper
- zoeper
17 Dec 2025 05:27
Replied by zoeper on topic Avon 3000 Mill retrofit
Avon 3000 Mill retrofit
Category: Milling Machines
Time to create page: 5.031 seconds