Search Results (Searched for: )
- tsaG
- tsaG
09 Nov 2025 21:58
Replied by tsaG on topic Probebasic tool length calculation
Probebasic tool length calculation
Category: QtPyVCP
- frayja2002
- frayja2002
09 Nov 2025 21:39 - 13 Nov 2025 21:05
Replied by frayja2002 on topic USB pendant stops working after using macros
USB pendant stops working after using macros
Category: Qtvcp
- endian

09 Nov 2025 19:27
Replied by endian on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- Masiwood123

09 Nov 2025 18:28
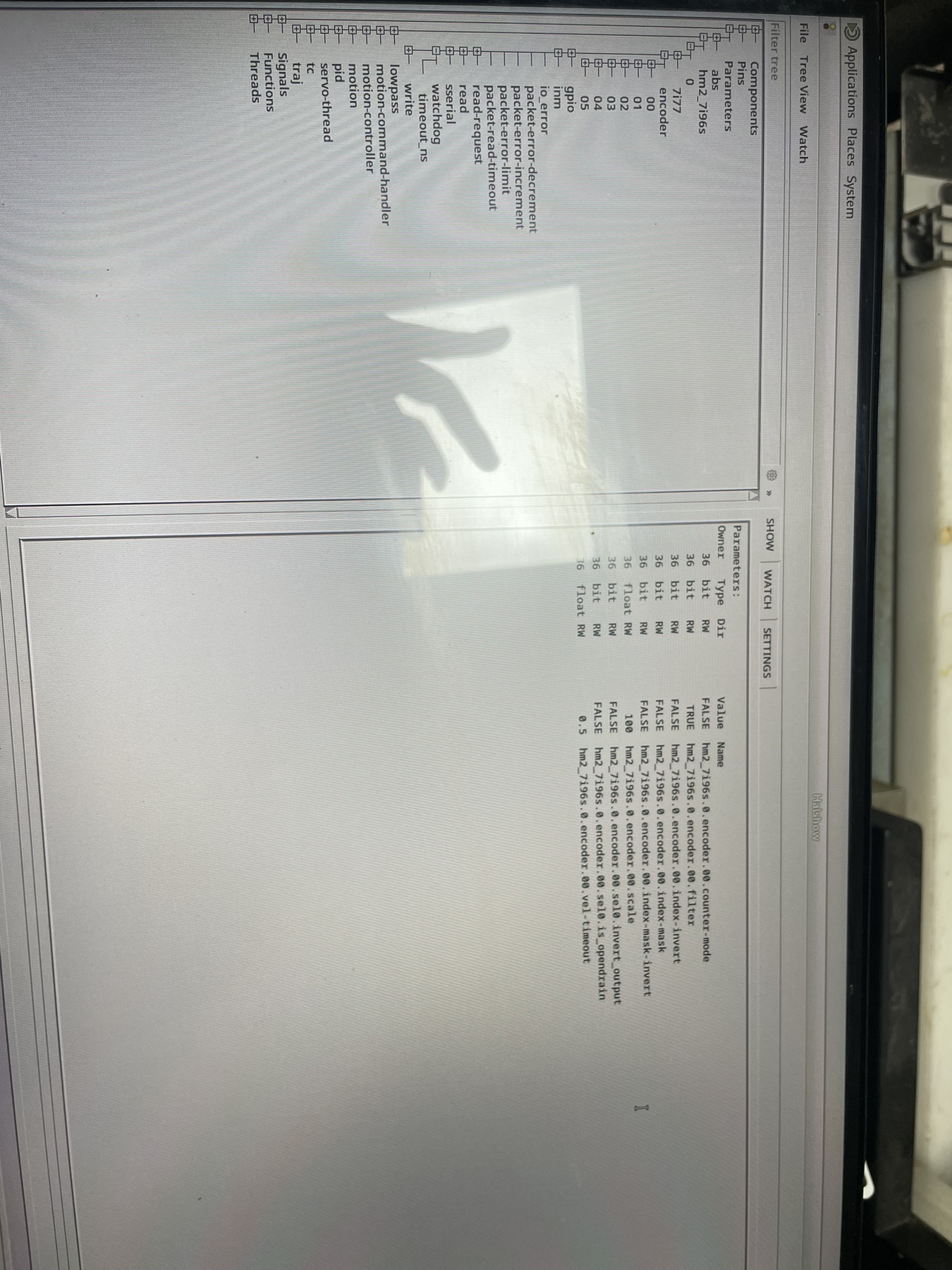
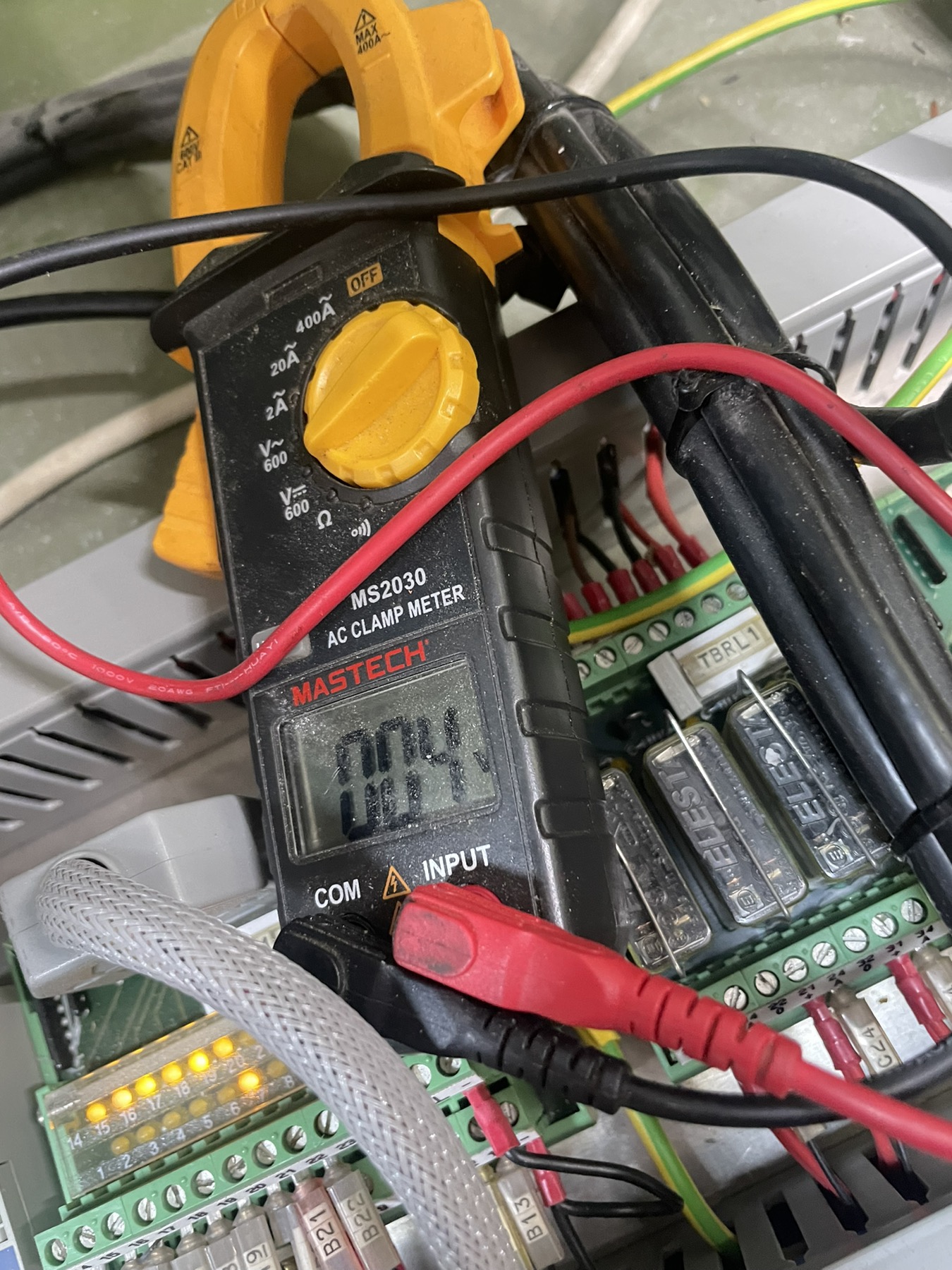
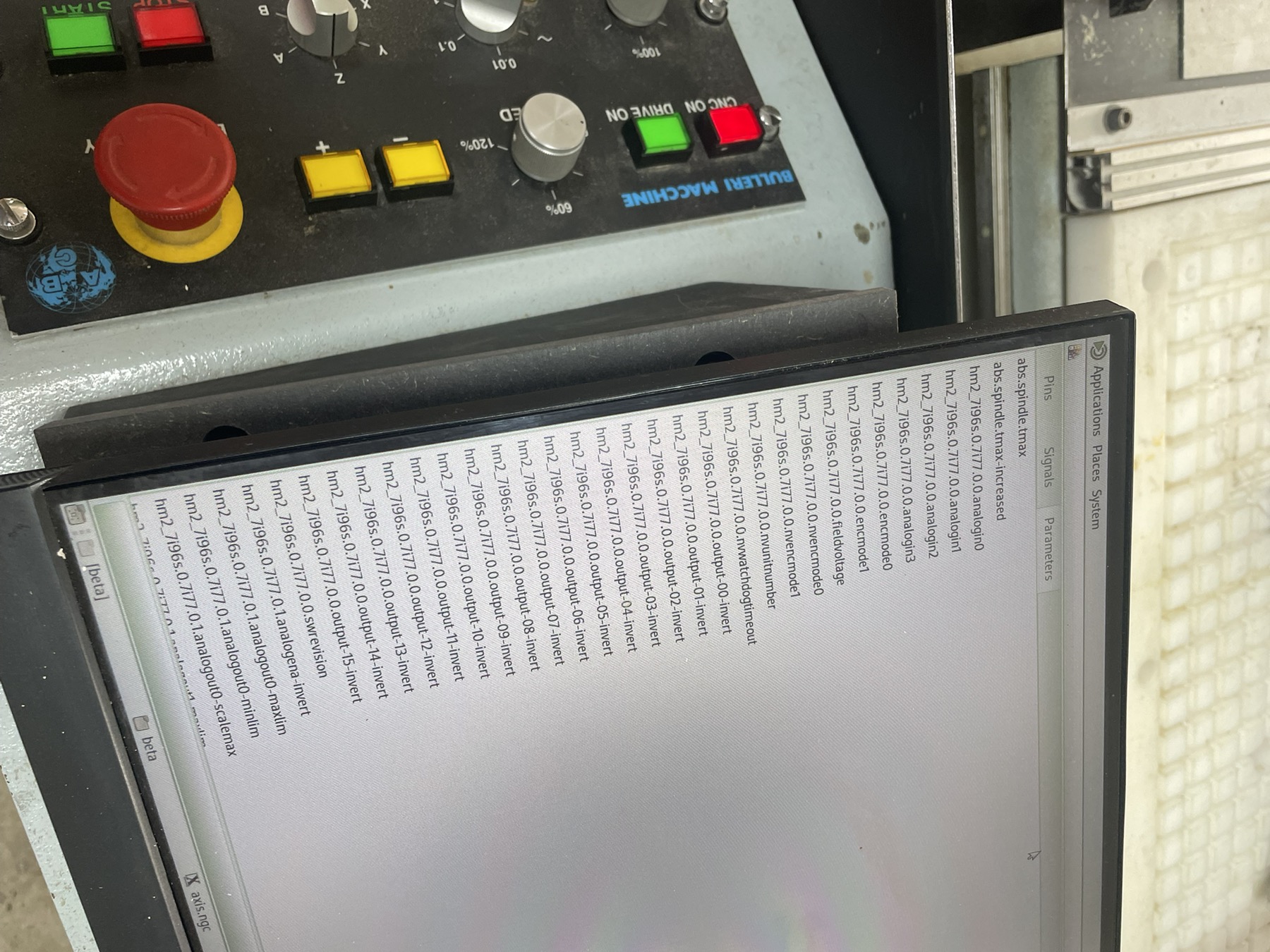
Replied by Masiwood123 on topic beta bulleri for retrofit?
beta bulleri for retrofit?
Category: CNC Machines
- andrax

09 Nov 2025 18:06
Replied by andrax on topic Ethercat auto configurator.
Ethercat auto configurator.
Category: EtherCAT
- zz912

09 Nov 2025 17:18
Compile files in /linuxcnc/lib/ was created by zz912
Compile files in /linuxcnc/lib/
Category: General LinuxCNC Questions
- deltafox24
- deltafox24
09 Nov 2025 16:23
Replied by deltafox24 on topic Rotary axis in Qtdragon_hd
Rotary axis in Qtdragon_hd
Category: Qtvcp
- clayton2ndtry
- clayton2ndtry
09 Nov 2025 16:19
- Masiwood123
09 Nov 2025 15:19
Replied by Masiwood123 on topic beta bulleri for retrofit?
beta bulleri for retrofit?
Category: CNC Machines

- tommylight

09 Nov 2025 12:22
Replied by tommylight on topic Replacement for RPI5
Replacement for RPI5
Category: Computers and Hardware
- axemas

09 Nov 2025 12:09 - 10 Nov 2025 14:17
Replied by axemas on topic I have built the hardware and I have some questions
I have built the hardware and I have some questions
Category: Computers and Hardware


- zoeper
- zoeper
09 Nov 2025 11:54
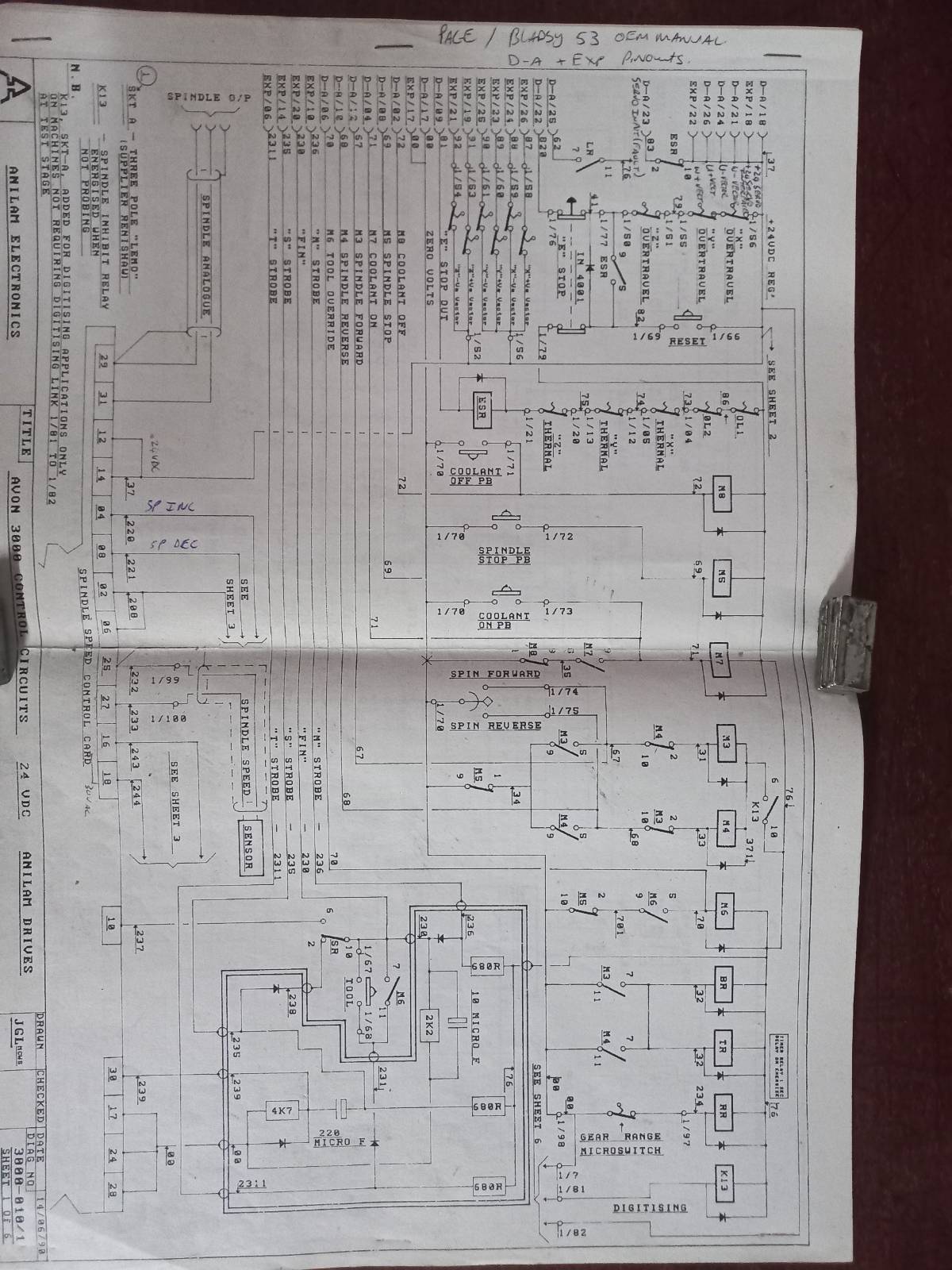
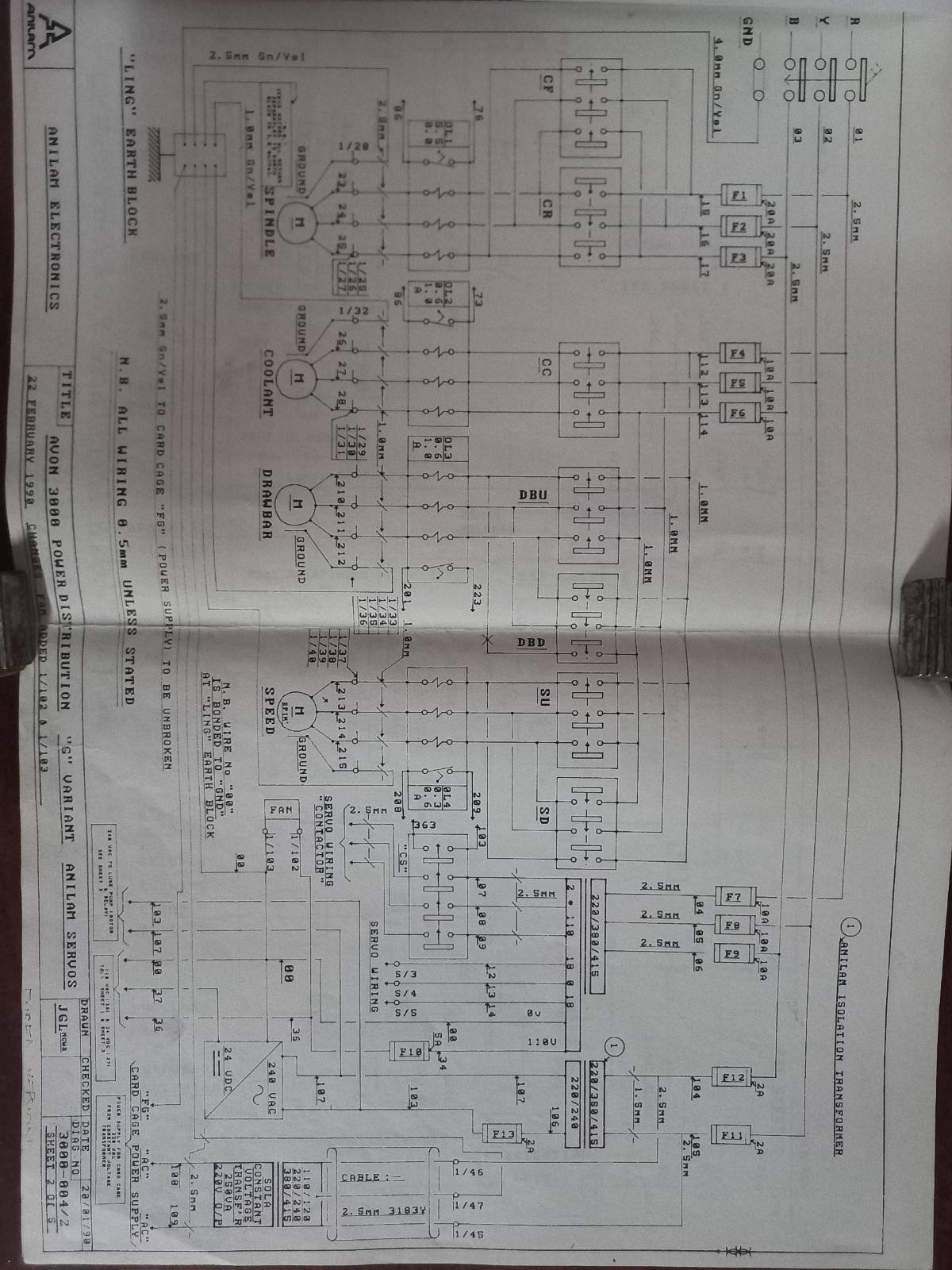
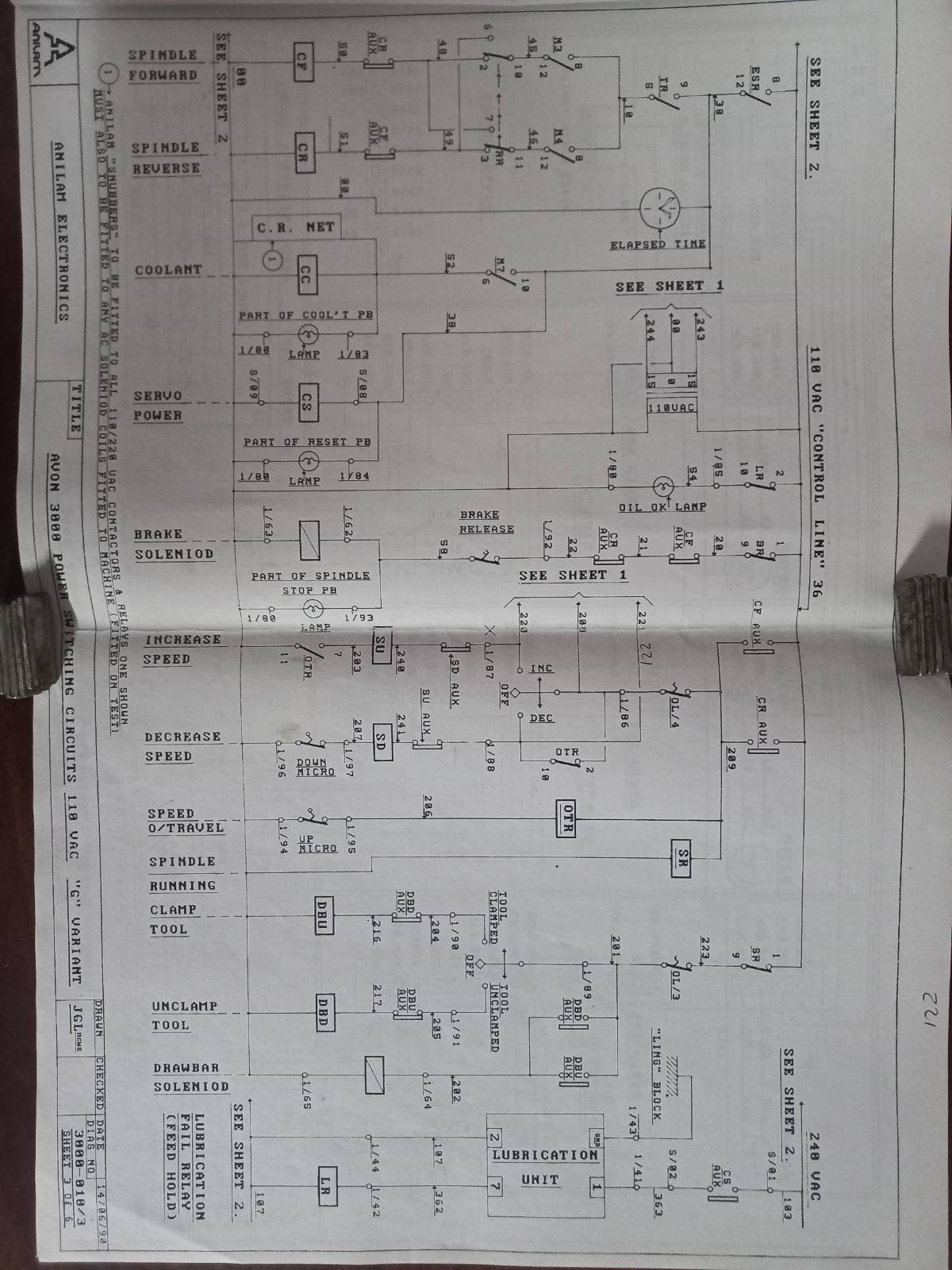
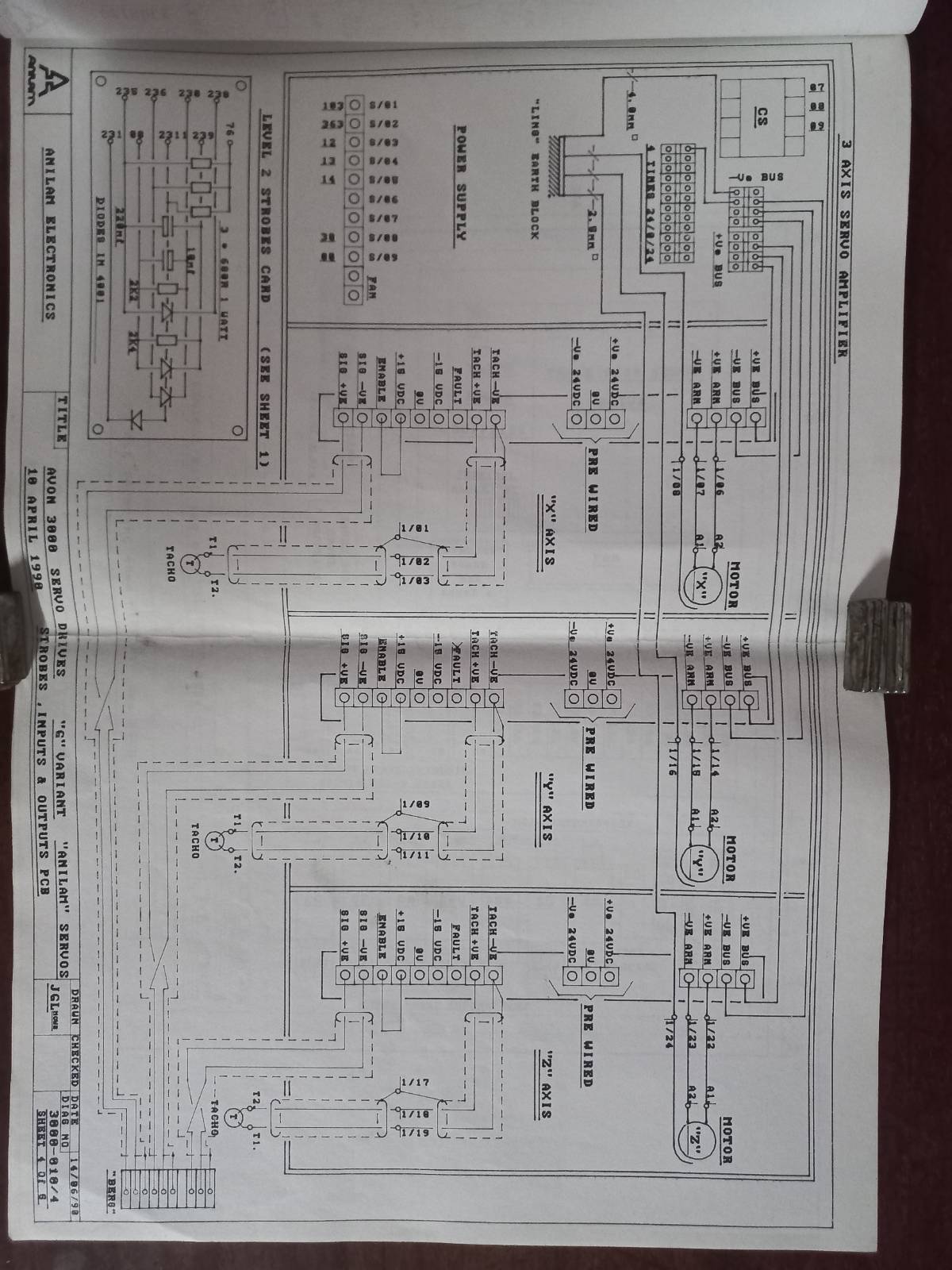
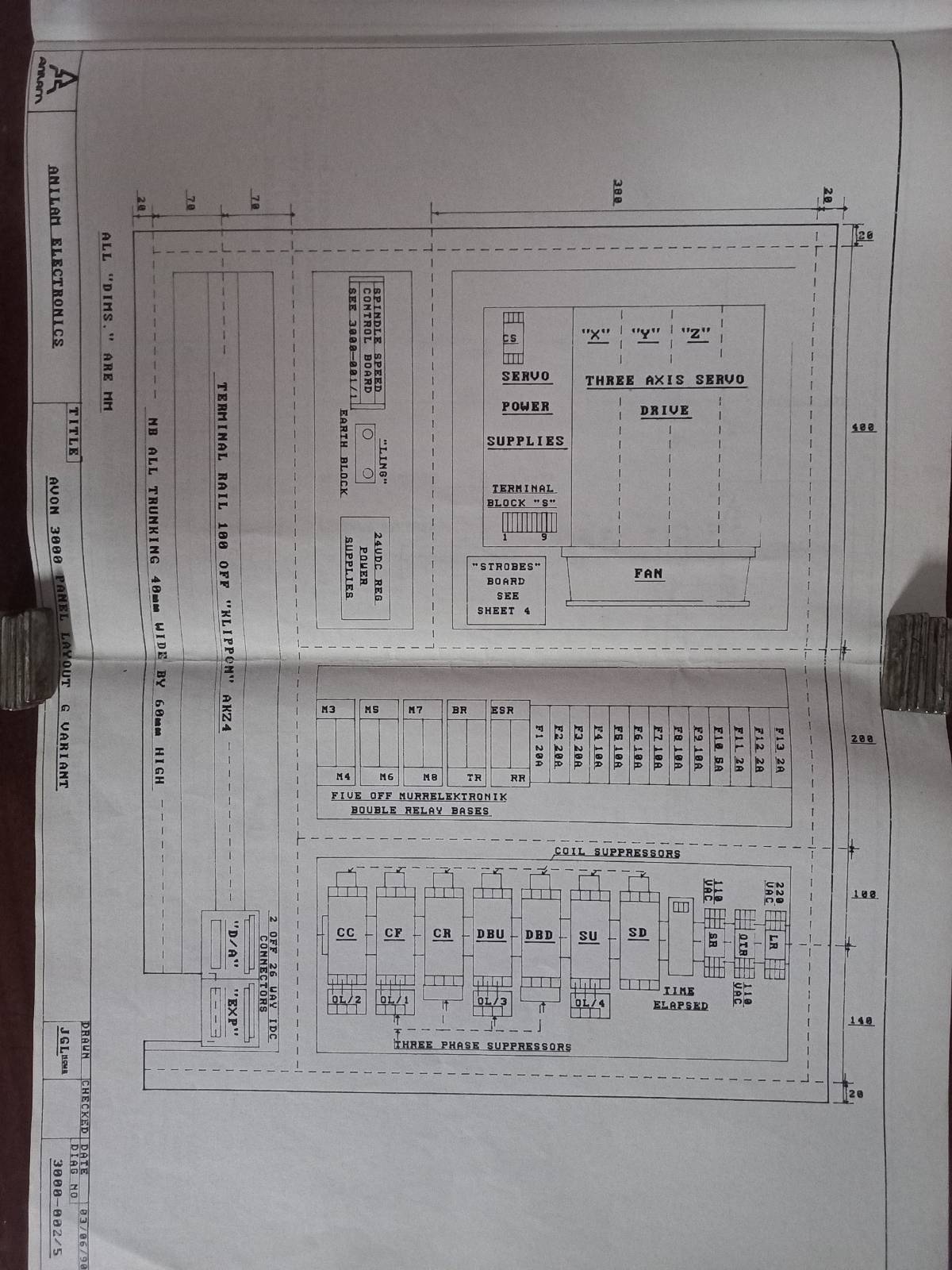
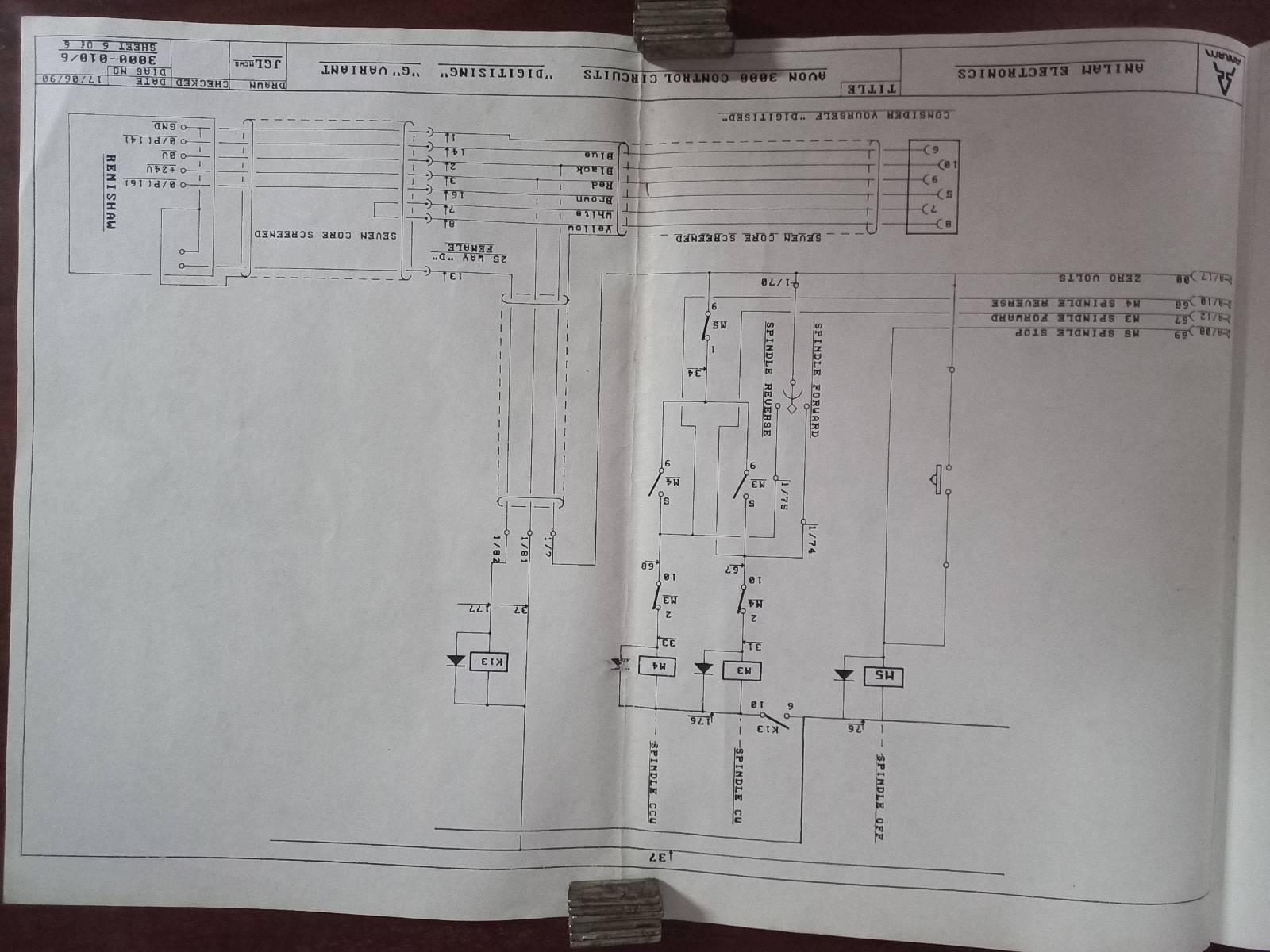
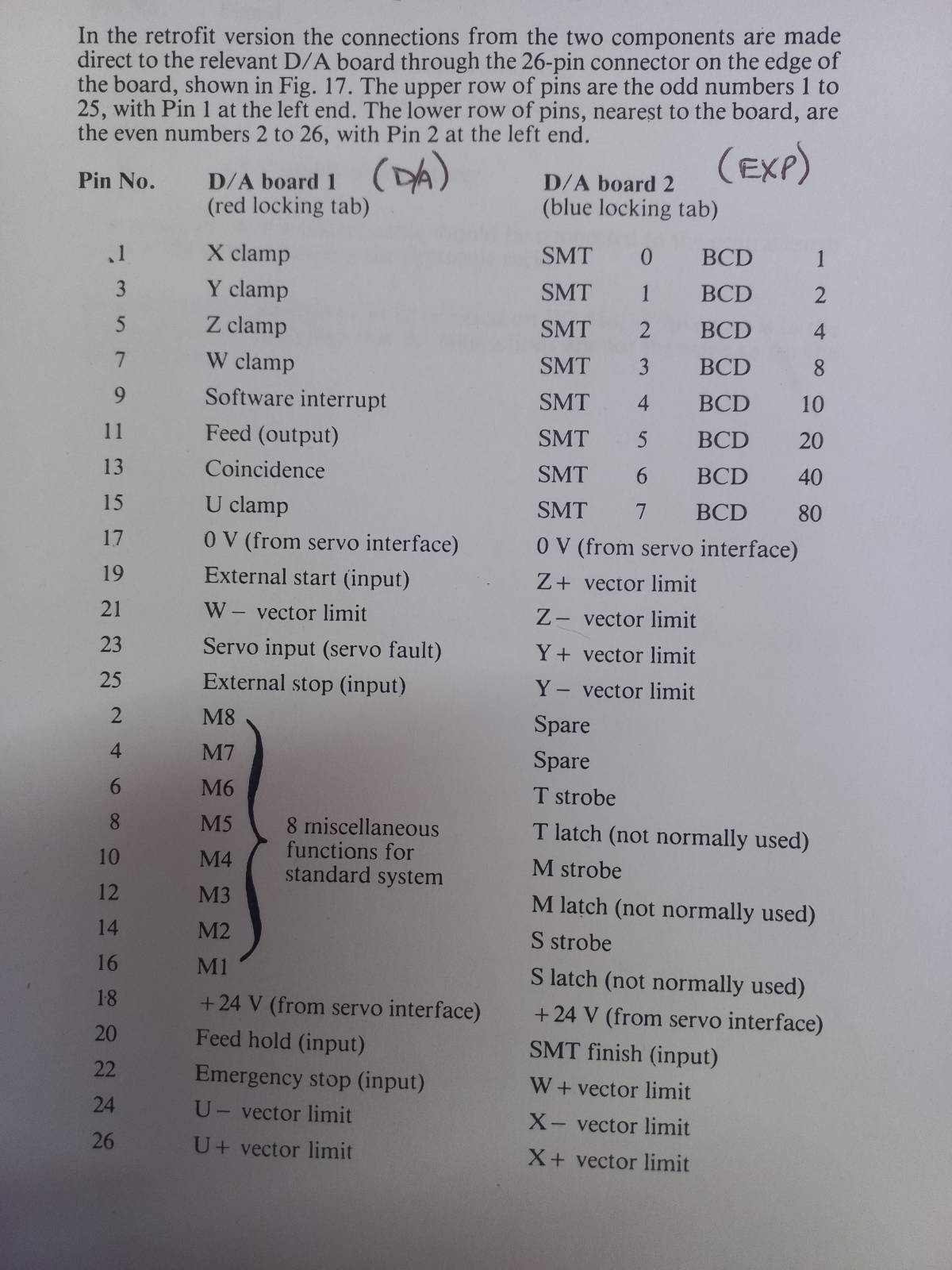
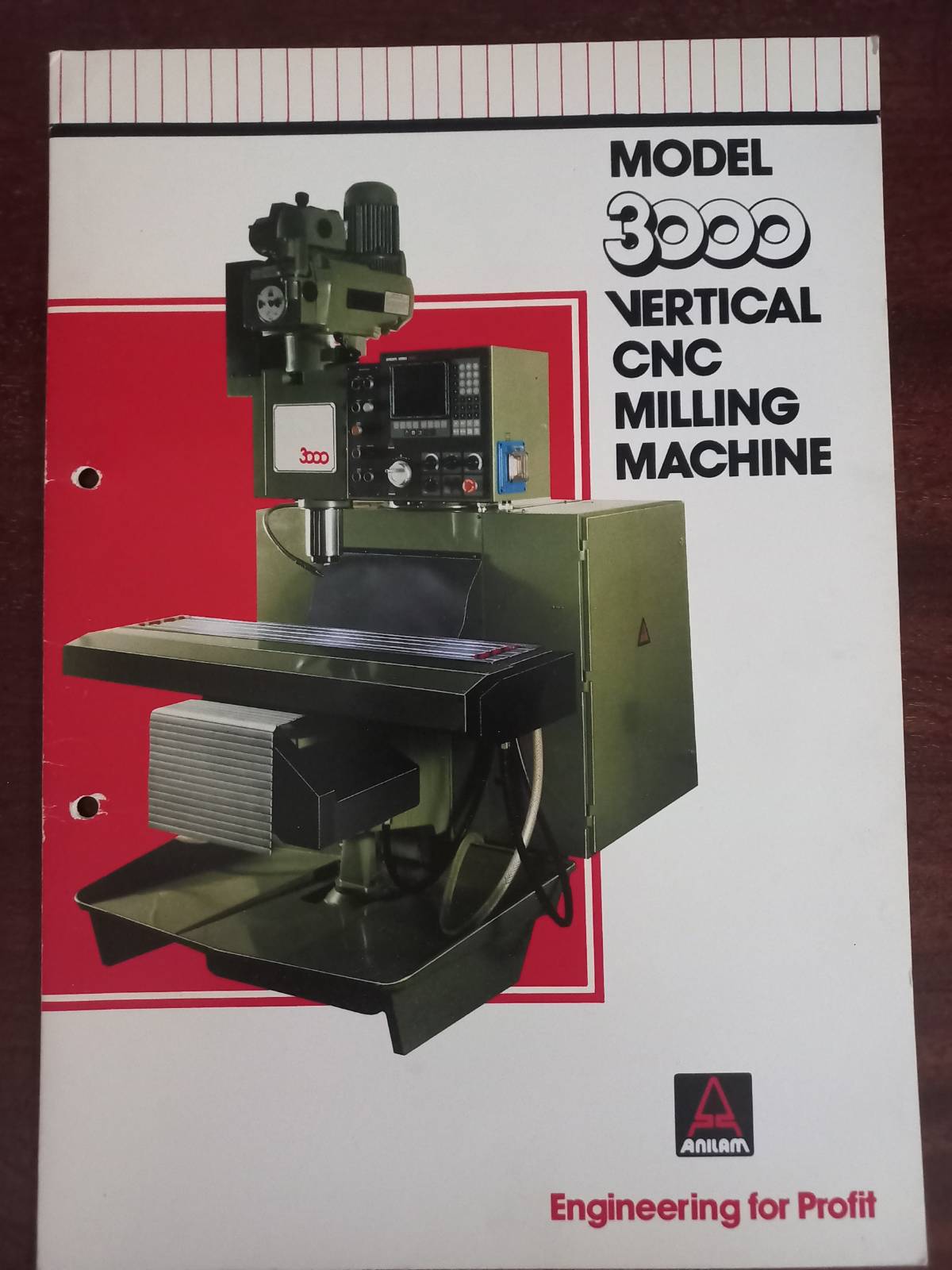
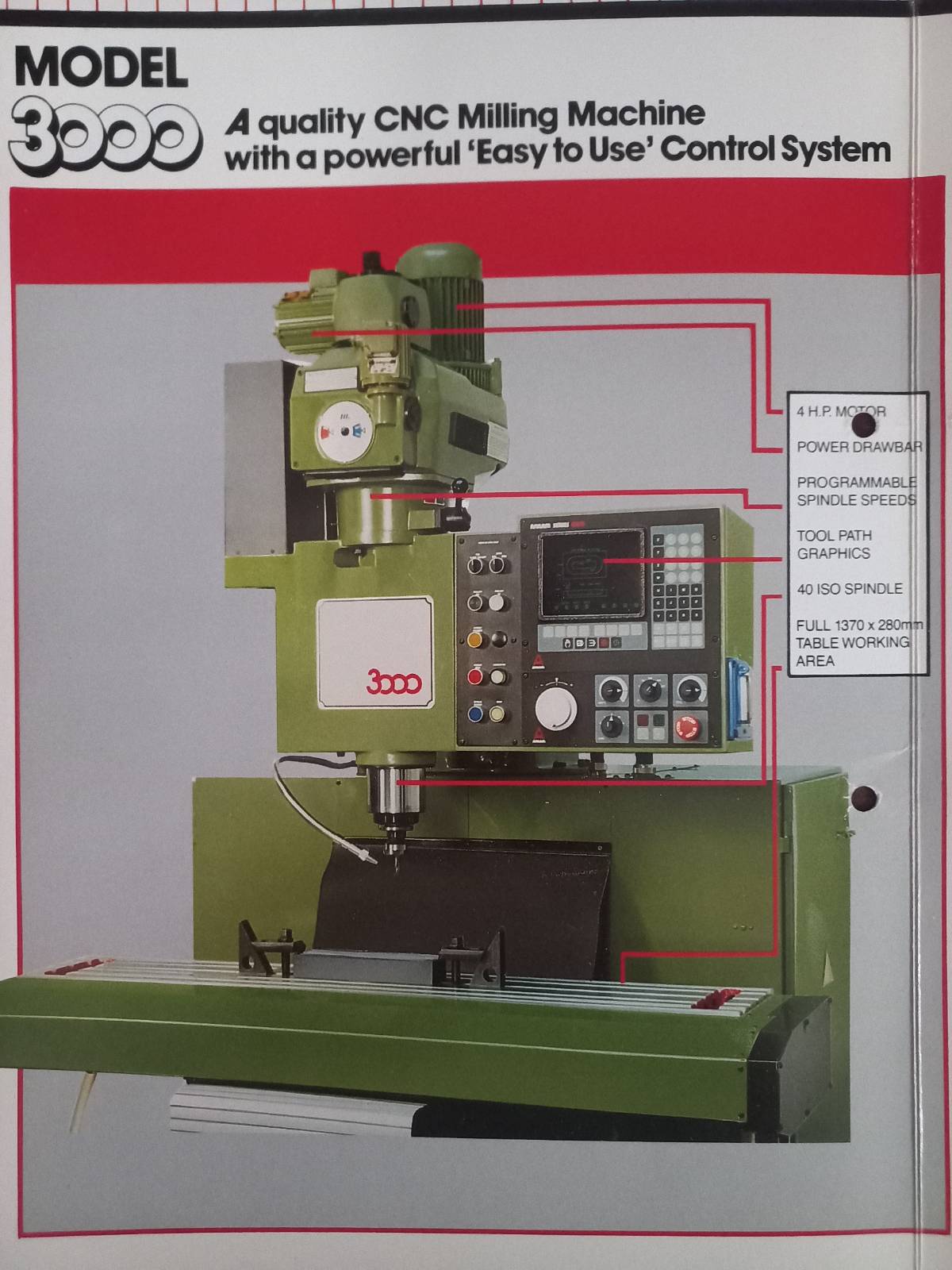
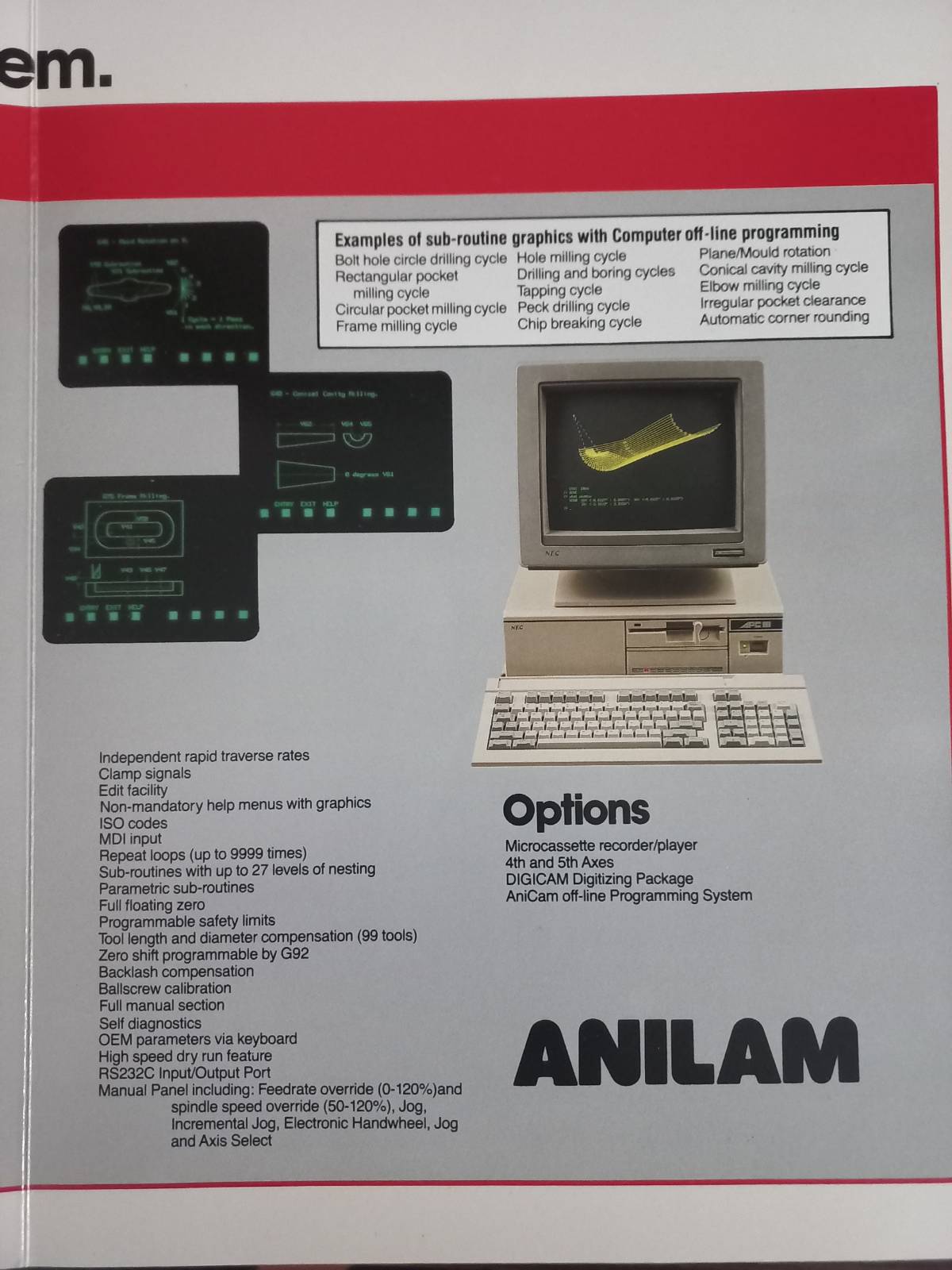
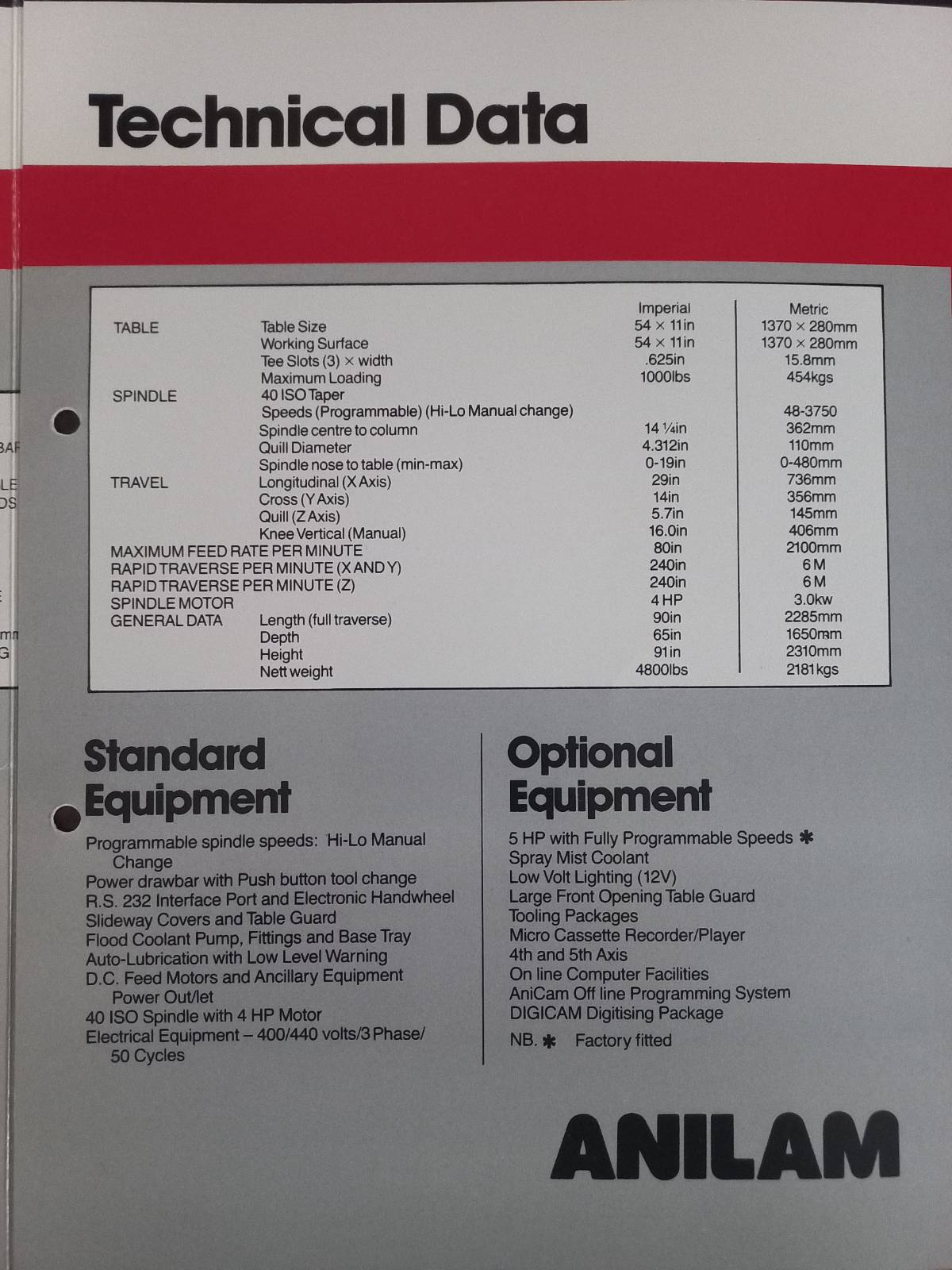
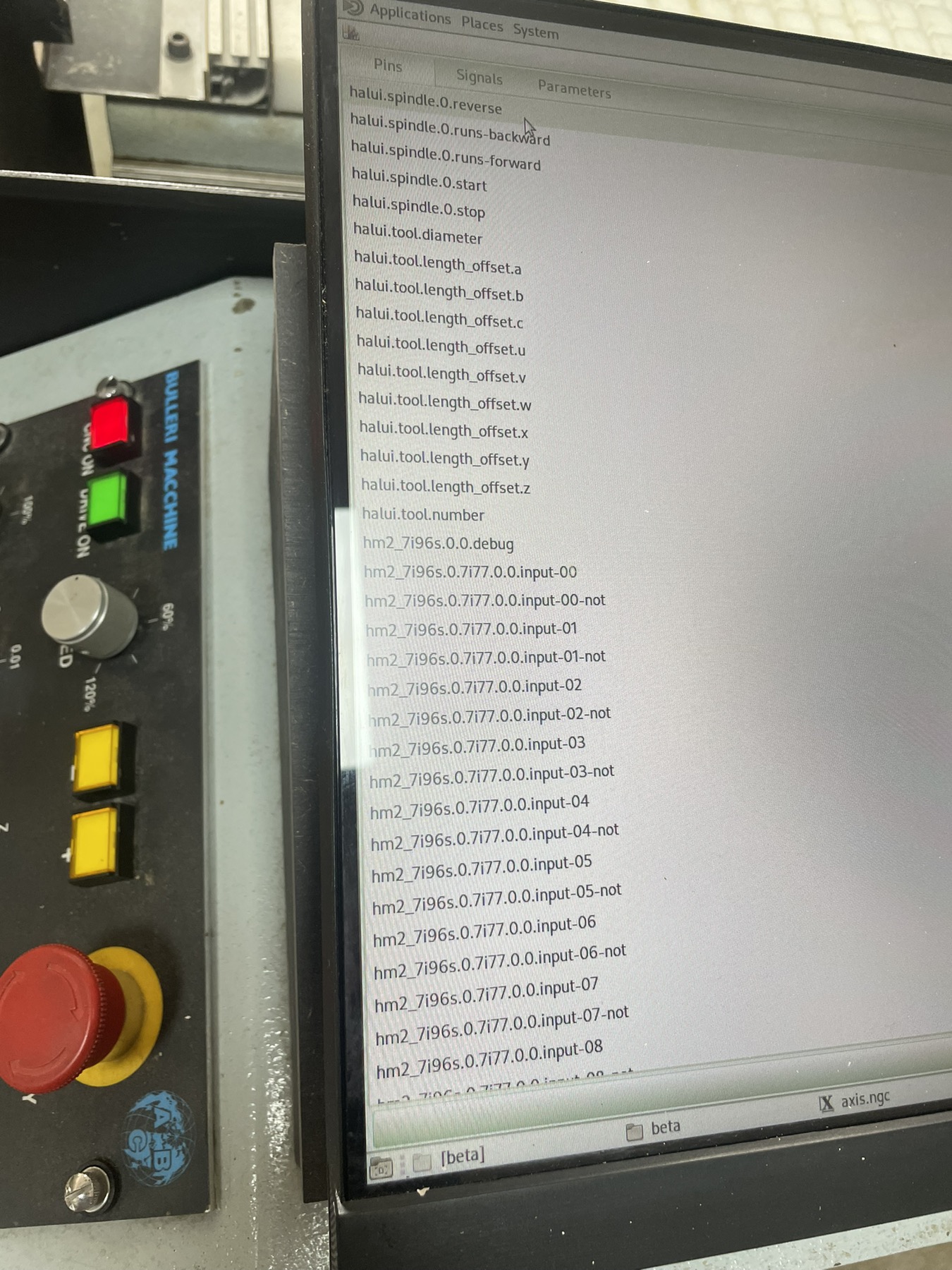
Replied by zoeper on topic Avon 3000 Mill retrofit
Avon 3000 Mill retrofit
Category: Milling Machines
- zoeper
- zoeper
09 Nov 2025 11:46
Replied by zoeper on topic Avon 3000 Mill retrofit
Avon 3000 Mill retrofit
Category: Milling Machines

- Masiwood123
09 Nov 2025 11:34
Replied by Masiwood123 on topic beta bulleri for retrofit?
beta bulleri for retrofit?
Category: CNC Machines

- rodw

09 Nov 2025 10:57
Replied by rodw on topic MonoKrom - QtPyVCP GUI for PlasmaC and Mill
MonoKrom - QtPyVCP GUI for PlasmaC and Mill
Category: QtPyVCP
Time to create page: 5.246 seconds