Search Results (Searched for: )
- MaHa
- MaHa
14 Oct 2025 22:07
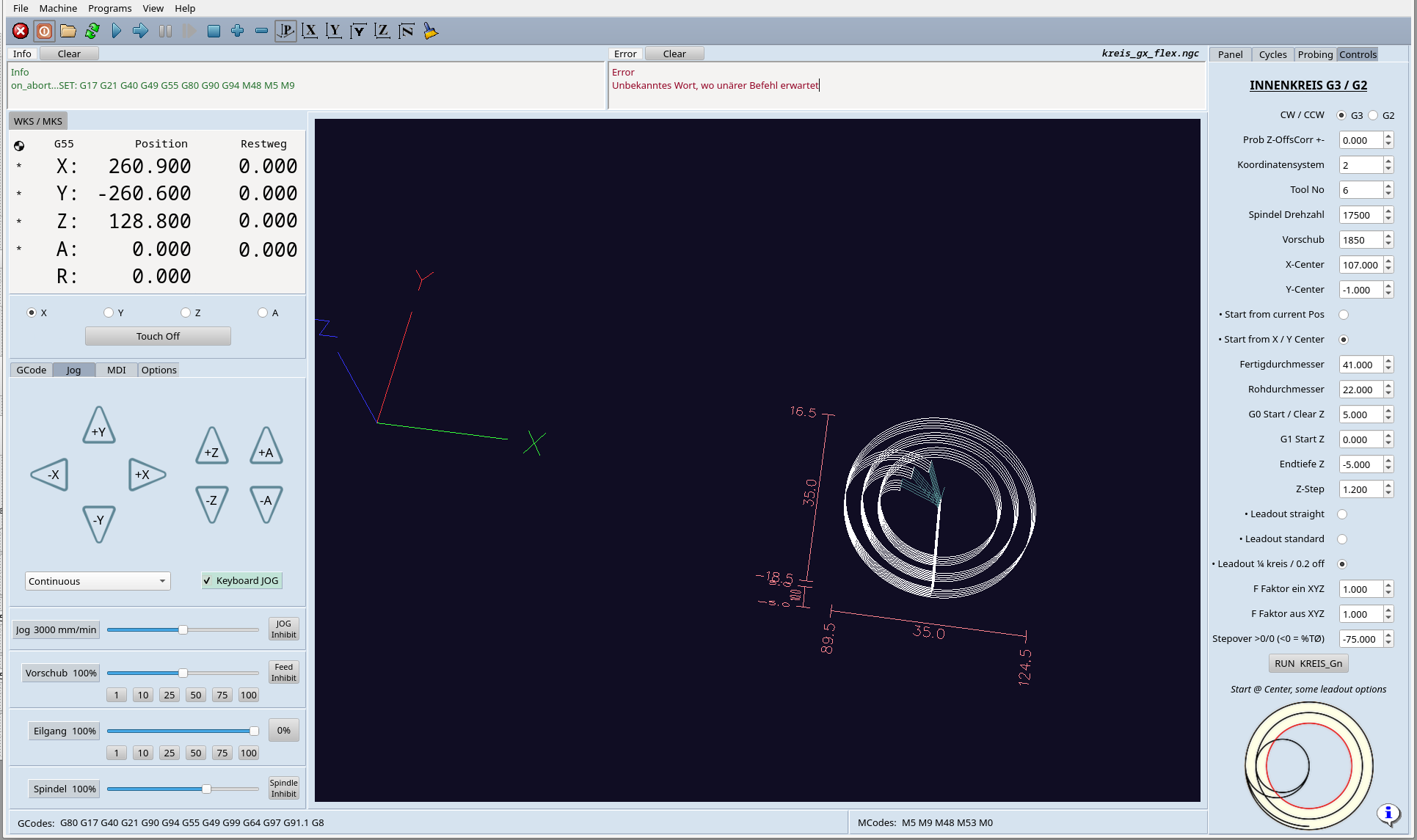
Replied by MaHa on topic FlexGui - function load_file
FlexGui - function load_file
Category: Flex GUI
- vre
- vre
14 Oct 2025 21:48
- unknown
- unknown
14 Oct 2025 21:12
Replied by unknown on topic fixing "raspi firmware" errors on the official amd64 ISO
fixing "raspi firmware" errors on the official amd64 ISO
Category: Installing LinuxCNC
- PCW

14 Oct 2025 21:06
Replied by PCW on topic M19 for Indexing a Spindle using Stepper Motors
M19 for Indexing a Spindle using Stepper Motors
Category: General LinuxCNC Questions
- Doc_emmet
- Doc_emmet
14 Oct 2025 20:53 - 14 Oct 2025 20:56
- richcolvin

14 Oct 2025 20:13
M19 for Indexing a Spindle using Stepper Motors was created by richcolvin
M19 for Indexing a Spindle using Stepper Motors
Category: General LinuxCNC Questions
- JT

14 Oct 2025 19:39 - 14 Oct 2025 19:41
- DerKlotz
- DerKlotz
14 Oct 2025 19:13
Replied by DerKlotz on topic Glade Hal Meter Spindle Speed -> postgui
Glade Hal Meter Spindle Speed -> postgui
Category: GladeVCP
- jmp97
- jmp97
14 Oct 2025 18:50
Replied by jmp97 on topic LinuxCNC installation + 7I96S
LinuxCNC installation + 7I96S
Category: Installing LinuxCNC
- PCW
14 Oct 2025 18:27
Replied by PCW on topic LinuxCNC installation + 7I96S
LinuxCNC installation + 7I96S
Category: Installing LinuxCNC
- abs32
- abs32
14 Oct 2025 18:16 - 01 Nov 2025 10:37
Replied by abs32 on topic Secondary PWM Output for LASER
Secondary PWM Output for LASER
Category: Advanced Configuration
- tommylight

14 Oct 2025 18:13
Replied by tommylight on topic Secondary PWM Output for LASER
Secondary PWM Output for LASER
Category: Advanced Configuration
- jmp97
- jmp97
14 Oct 2025 18:04
Replied by jmp97 on topic LinuxCNC installation + 7I96S
LinuxCNC installation + 7I96S
Category: Installing LinuxCNC
- Dave3891
- Dave3891
14 Oct 2025 17:42 - 14 Oct 2025 17:43
- Ul
- Ul
14 Oct 2025 17:17
Replied by Ul on topic Probleme WIFI Rasperry Pi5 mit 2.9.6
Probleme WIFI Rasperry Pi5 mit 2.9.6
Category: Deutsch
Time to create page: 1.435 seconds