Help with adding PlasmaC to base config + 7i76e
- Plasmaguy
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

Less
More
- Posts: 76
- Thank you received: 9
10 May 2020 02:08 - 10 May 2020 02:11 #167219
by Plasmaguy
Replied by Plasmaguy on topic Help with adding PlasmaC to base config + 7i76e
Okay I edited my base hal file so this is now at the bottom
setp hm2_7i76e.0.7i76.0.0.encoder.00.scale -1
setp hm2_7i76e.0.7i76.0.0.encoder.00.filter -1
setp hm2_7i76e.0.7i76.0.0.encoder.00.counter-mode 1
and then run configurator
I still get errors:
I'll go ahead and try to attach my config files:
setp hm2_7i76e.0.7i76.0.0.encoder.00.scale -1
setp hm2_7i76e.0.7i76.0.0.encoder.00.filter -1
setp hm2_7i76e.0.7i76.0.0.encoder.00.counter-mode 1
and then run configurator
I still get errors:
I'll go ahead and try to attach my config files:
Last edit: 10 May 2020 02:11 by Plasmaguy.
Please Log in or Create an account to join the conversation.
- phillc54
-

- Offline
- Platinum Member
-

Less
More
- Posts: 5711
- Thank you received: 2100
10 May 2020 02:14 #167220
by phillc54
Replied by phillc54 on topic Help with adding PlasmaC to base config + 7i76e
Maybe it is just:I don't have one handy and am just guessing...
You can verify pin names in the menu Machine > Show Hal Configuration > Pins >
You will need to comment out those error lines so LinuxCNC starts
hm2_7i76e.0.encoder.00You can verify pin names in the menu Machine > Show Hal Configuration > Pins >
You will need to comment out those error lines so LinuxCNC starts
The following user(s) said Thank You: Plasmaguy
Please Log in or Create an account to join the conversation.
- Plasmaguy
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 76
- Thank you received: 9
10 May 2020 02:44 - 10 May 2020 02:51 #167224
by Plasmaguy
Replied by Plasmaguy on topic Help with adding PlasmaC to base config + 7i76e
Tried it both ways (three if counting when I had too many periods in there) with the same result. If I put those lines in my working hal file and then try to start LCNC up it crashes right away with this same error. Also I can't seem to locate the encoder pin anywhere in my show hal config and if I search for "encoder" in my hal file I find a statement saying " num_encoders=0 ".
I was able to locate my float switch and spindle on in show hal config...not sure where the encoder is hiding.
What does this entail? Hate to ask, but I don't know.
I was able to locate my float switch and spindle on in show hal config...not sure where the encoder is hiding.
You will need to comment out those error lines so LinuxCNC starts
What does this entail? Hate to ask, but I don't know.
Last edit: 10 May 2020 02:51 by Plasmaguy.
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
10 May 2020 02:51 #167225
by phillc54
Replied by phillc54 on topic Help with adding PlasmaC to base config + 7i76e
Sorry, I mised that:
This:Should be:
This:
loadrt hm2_eth board_ip="10.10.10.10" config=" num_encoders=0 num_pwmgens=0 num_stepgens=3 sserial_port_0=00xxxx" loadrt hm2_eth board_ip="10.10.10.10" config=" num_encoders=1 num_pwmgens=0 num_stepgens=3 sserial_port_0=00xxxx"
The following user(s) said Thank You: Plasmaguy
Please Log in or Create an account to join the conversation.
- Plasmaguy
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 76
- Thank you received: 9
10 May 2020 03:19 - 10 May 2020 03:27 #167226
by Plasmaguy
Replied by Plasmaguy on topic Help with adding PlasmaC to base config + 7i76e
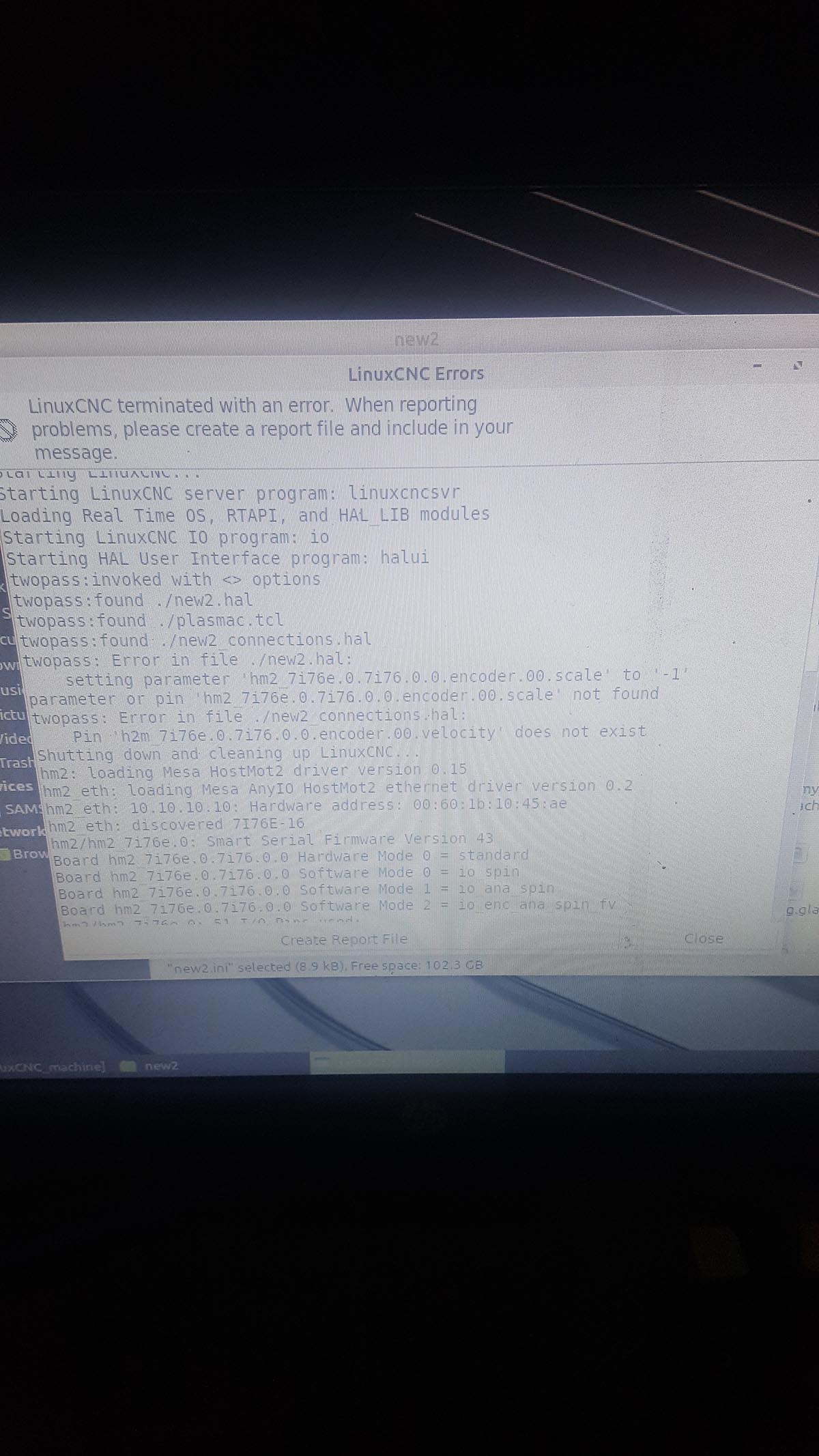
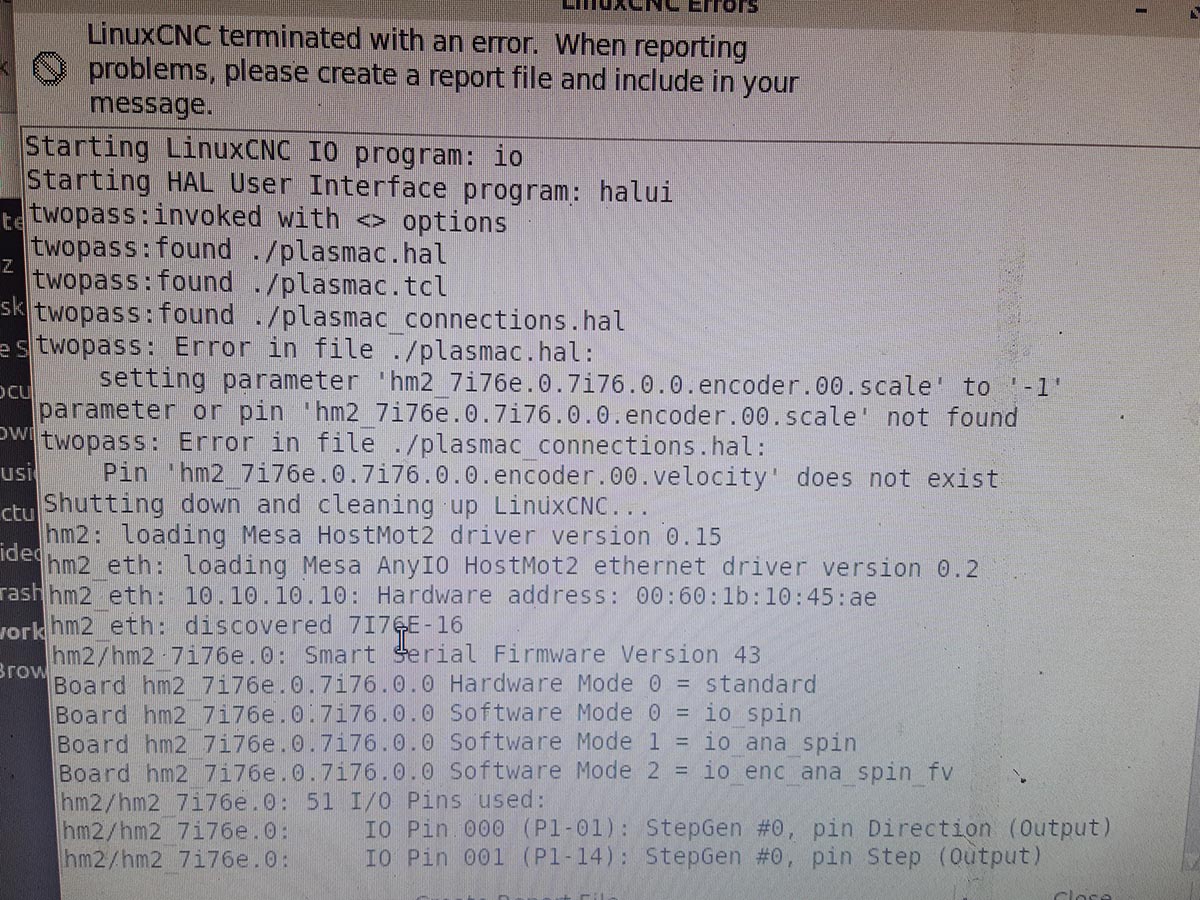
After that here's the resulting error:
Attachments:
Last edit: 10 May 2020 03:27 by Plasmaguy.
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
10 May 2020 03:22 #167227
by phillc54
Replied by phillc54 on topic Help with adding PlasmaC to base config + 7i76e
I don't know where it is getting "concat" from, can you post the hal file you edited.
Please Log in or Create an account to join the conversation.
- Plasmaguy
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 76
- Thank you received: 9
10 May 2020 03:34 #167228
by Plasmaguy
Replied by Plasmaguy on topic Help with adding PlasmaC to base config + 7i76e
# Generated by PNCconf at Fri May 8 18:45:28 2020
# Using LinuxCNC version: UNAVAILABLE
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="10.10.10.10" config=" num_encoders=1 num_pwmgens=0 num_stepgens=3 sserial_port_0=00xxxx"
setp hm2_7i76e.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_7i76e.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_7i76e.0.write servo-thread
setp hm2_7i76e.0.dpll.01.timer-us -50
setp hm2_7i76e.0.stepgen.timer-number 1
# external output signals
# external input signals
# --- PROBE-IN ---
net probe-in <= hm2_7i76e.0.7i76.0.0.input-07
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
setp pid.x.maxerror .0005
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Step Gen signals/setup
setp hm2_7i76e.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i76e.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_7i76e.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_7i76e.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_7i76e.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i76e.0.stepgen.00.step_type 0
setp hm2_7i76e.0.stepgen.00.control-type 1
setp hm2_7i76e.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output <= hm2_7i76e.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i76e.0.stepgen.00.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i76e.0.stepgen.00.enable
# ---setup home / limit switch signals---
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
setp pid.y.maxerror .0005
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# Step Gen signals/setup
setp hm2_7i76e.0.stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp hm2_7i76e.0.stepgen.01.dirhold [JOINT_1]DIRHOLD
setp hm2_7i76e.0.stepgen.01.steplen [JOINT_1]STEPLEN
setp hm2_7i76e.0.stepgen.01.stepspace [JOINT_1]STEPSPACE
setp hm2_7i76e.0.stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp hm2_7i76e.0.stepgen.01.step_type 0
setp hm2_7i76e.0.stepgen.01.control-type 1
setp hm2_7i76e.0.stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-output <= hm2_7i76e.0.stepgen.01.velocity-cmd
net y-pos-fb <= hm2_7i76e.0.stepgen.01.position-fb
net y-pos-fb => joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
net y-enable => hm2_7i76e.0.stepgen.01.enable
# ---setup home / limit switch signals---
net y-home-sw => joint.1.home-sw-in
net y-neg-limit => joint.1.neg-lim-sw-in
net y-pos-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
setp pid.z.maxerror .0005
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp hm2_7i76e.0.stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp hm2_7i76e.0.stepgen.02.dirhold [JOINT_2]DIRHOLD
setp hm2_7i76e.0.stepgen.02.steplen [JOINT_2]STEPLEN
setp hm2_7i76e.0.stepgen.02.stepspace [JOINT_2]STEPSPACE
setp hm2_7i76e.0.stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp hm2_7i76e.0.stepgen.02.step_type 0
setp hm2_7i76e.0.stepgen.02.control-type 1
setp hm2_7i76e.0.stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-vel-cmd <= joint.2.vel-cmd
net z-output <= hm2_7i76e.0.stepgen.02.velocity-cmd
net z-pos-fb <= hm2_7i76e.0.stepgen.02.position-fb
net z-pos-fb => joint.2.motor-pos-fb
net z-enable <= joint.2.amp-enable-out
net z-enable => hm2_7i76e.0.stepgen.02.enable
# ---setup home / limit switch signals---
net z-home-sw => joint.2.home-sw-in
net z-neg-limit => joint.2.neg-lim-sw-in
net z-pos-limit => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm-abs => pid.s.command
net spindle-vel-fb-rpm-abs => pid.s.feedback
net spindle-output <= pid.s.output
# ---digital potentionmeter output signals/setup---
setp hm2_7i76e.0.7i76.0.0.spinout-minlim [SPINDLE_0]OUTPUT_MIN_LIMIT
setp hm2_7i76e.0.7i76.0.0.spinout-maxlim [SPINDLE_0]OUTPUT_MAX_LIMIT
setp hm2_7i76e.0.7i76.0.0.spinout-scalemax [SPINDLE_0]OUTPUT_SCALE
net spindle-output => hm2_7i76e.0.7i76.0.0.spinout
net spindle-enable => hm2_7i76e.0.7i76.0.0.spinena
net spindle-ccw => hm2_7i76e.0.7i76.0.0.spindir
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---toolchange signals for custom tool changer---
net tool-number <= iocontrol.0.tool-prep-number
net tool-change-request <= iocontrol.0.tool-change
net tool-change-confirmed => iocontrol.0.tool-changed
net tool-prepare-request <= iocontrol.0.tool-prepare
net tool-prepare-confirmed => iocontrol.0.tool-prepared
setp hm2_7i76e.0.7i76.0.0.encoder.00.scale -1
setp hm2_7i76e.0.7i76.0.0.encoder.00.filter -1
setp hm2_7i76e.0.7i76.0.0.encoder.00.counter-mode 1
# Using LinuxCNC version: UNAVAILABLE
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="10.10.10.10" config=" num_encoders=1 num_pwmgens=0 num_stepgens=3 sserial_port_0=00xxxx"
setp hm2_7i76e.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_7i76e.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_7i76e.0.write servo-thread
setp hm2_7i76e.0.dpll.01.timer-us -50
setp hm2_7i76e.0.stepgen.timer-number 1
# external output signals
# external input signals
# --- PROBE-IN ---
net probe-in <= hm2_7i76e.0.7i76.0.0.input-07
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
setp pid.x.maxerror .0005
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Step Gen signals/setup
setp hm2_7i76e.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i76e.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_7i76e.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_7i76e.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_7i76e.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i76e.0.stepgen.00.step_type 0
setp hm2_7i76e.0.stepgen.00.control-type 1
setp hm2_7i76e.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output <= hm2_7i76e.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i76e.0.stepgen.00.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i76e.0.stepgen.00.enable
# ---setup home / limit switch signals---
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
setp pid.y.maxerror .0005
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# Step Gen signals/setup
setp hm2_7i76e.0.stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp hm2_7i76e.0.stepgen.01.dirhold [JOINT_1]DIRHOLD
setp hm2_7i76e.0.stepgen.01.steplen [JOINT_1]STEPLEN
setp hm2_7i76e.0.stepgen.01.stepspace [JOINT_1]STEPSPACE
setp hm2_7i76e.0.stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp hm2_7i76e.0.stepgen.01.step_type 0
setp hm2_7i76e.0.stepgen.01.control-type 1
setp hm2_7i76e.0.stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-output <= hm2_7i76e.0.stepgen.01.velocity-cmd
net y-pos-fb <= hm2_7i76e.0.stepgen.01.position-fb
net y-pos-fb => joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
net y-enable => hm2_7i76e.0.stepgen.01.enable
# ---setup home / limit switch signals---
net y-home-sw => joint.1.home-sw-in
net y-neg-limit => joint.1.neg-lim-sw-in
net y-pos-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
setp pid.z.maxerror .0005
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp hm2_7i76e.0.stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp hm2_7i76e.0.stepgen.02.dirhold [JOINT_2]DIRHOLD
setp hm2_7i76e.0.stepgen.02.steplen [JOINT_2]STEPLEN
setp hm2_7i76e.0.stepgen.02.stepspace [JOINT_2]STEPSPACE
setp hm2_7i76e.0.stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp hm2_7i76e.0.stepgen.02.step_type 0
setp hm2_7i76e.0.stepgen.02.control-type 1
setp hm2_7i76e.0.stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-vel-cmd <= joint.2.vel-cmd
net z-output <= hm2_7i76e.0.stepgen.02.velocity-cmd
net z-pos-fb <= hm2_7i76e.0.stepgen.02.position-fb
net z-pos-fb => joint.2.motor-pos-fb
net z-enable <= joint.2.amp-enable-out
net z-enable => hm2_7i76e.0.stepgen.02.enable
# ---setup home / limit switch signals---
net z-home-sw => joint.2.home-sw-in
net z-neg-limit => joint.2.neg-lim-sw-in
net z-pos-limit => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm-abs => pid.s.command
net spindle-vel-fb-rpm-abs => pid.s.feedback
net spindle-output <= pid.s.output
# ---digital potentionmeter output signals/setup---
setp hm2_7i76e.0.7i76.0.0.spinout-minlim [SPINDLE_0]OUTPUT_MIN_LIMIT
setp hm2_7i76e.0.7i76.0.0.spinout-maxlim [SPINDLE_0]OUTPUT_MAX_LIMIT
setp hm2_7i76e.0.7i76.0.0.spinout-scalemax [SPINDLE_0]OUTPUT_SCALE
net spindle-output => hm2_7i76e.0.7i76.0.0.spinout
net spindle-enable => hm2_7i76e.0.7i76.0.0.spinena
net spindle-ccw => hm2_7i76e.0.7i76.0.0.spindir
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---toolchange signals for custom tool changer---
net tool-number <= iocontrol.0.tool-prep-number
net tool-change-request <= iocontrol.0.tool-change
net tool-change-confirmed => iocontrol.0.tool-changed
net tool-prepare-request <= iocontrol.0.tool-prepare
net tool-prepare-confirmed => iocontrol.0.tool-prepared
setp hm2_7i76e.0.7i76.0.0.encoder.00.scale -1
setp hm2_7i76e.0.7i76.0.0.encoder.00.filter -1
setp hm2_7i76e.0.7i76.0.0.encoder.00.counter-mode 1
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
10 May 2020 03:49 #167230
by phillc54
Replied by phillc54 on topic Help with adding PlasmaC to base config + 7i76e
I am getting confused now, what is the latest error message?
Please Log in or Create an account to join the conversation.
- Plasmaguy
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 76
- Thank you received: 9
10 May 2020 03:53 #167231
by Plasmaguy
Replied by Plasmaguy on topic Help with adding PlasmaC to base config + 7i76e
It's in the picture in
this post.forum.linuxcnc.org/plasmac/39045-help-wi...i76e?start=10#167226
Something about encoder scale and encoder velocity.
Something about encoder scale and encoder velocity.
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
10 May 2020 04:14 #167233
by phillc54
Replied by phillc54 on topic Help with adding PlasmaC to base config + 7i76e
They should be like this:
setp hm2_7i76e.0.encoder.00.scale -1
setp hm2_7i76e.0.encoder.00.filter 1
setp hm2_7i76e.0.encoder.00.counter-mode 1
net plasmac:arc-voltage-in hm2_7i76e.0.encoder.00.velocity => plasmac.arc-voltage-inPlease Log in or Create an account to join the conversation.
Moderators: snowgoer540
Time to create page: 0.178 seconds