Couple questions about QTPYVCP
- Leon82
- Offline
- Platinum Member
-

Less
More
- Posts: 592
- Thank you received: 79
22 Dec 2019 20:03 #153068
by Leon82
Have you tried setting the button to checkable?
Replied by Leon82 on topic Couple questions about QTPYVCP
Hi everyone
I am not sure if it's correct please for this question (sorry if not) but my be you can help me with the problem described hier: www.forum.linuxcnc.org/18-computer/38015-whb04b-4#153040
If I press an actionButton in the GUI with the following action: "machine.jog.axis:x,pos" than the machine change the mode from
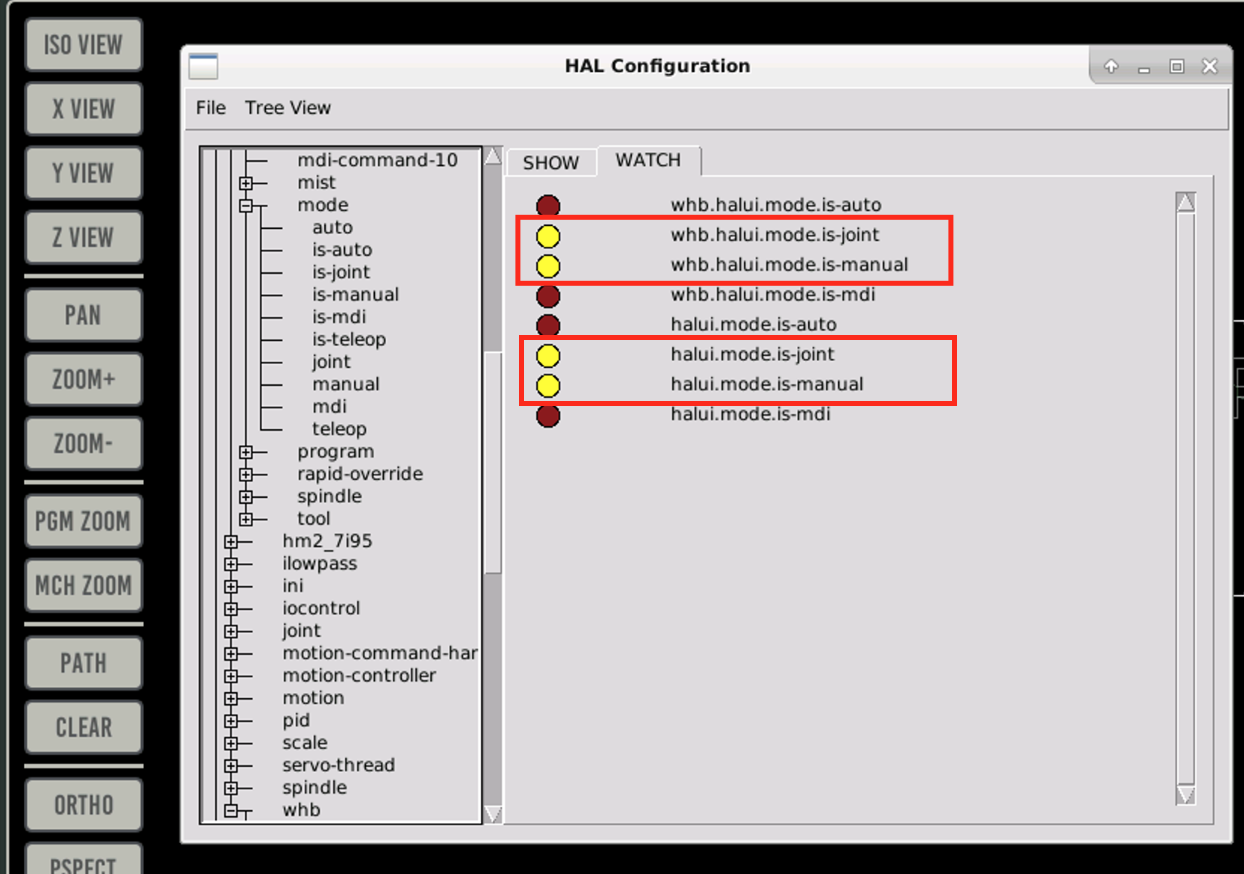
to
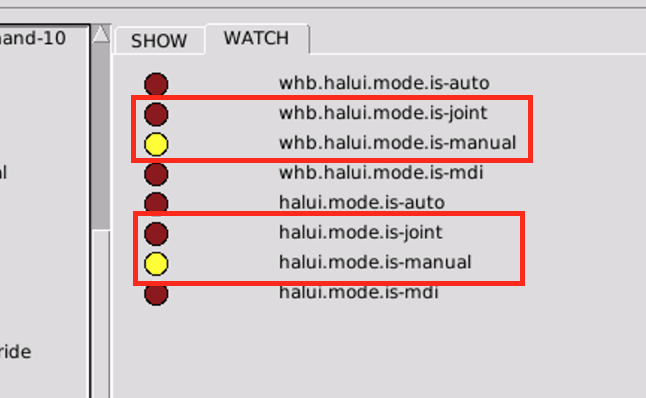
and after that I can jog with MPG (WHB04B-4) as it should be. As soon I press one of macro buttons on MPG, the machine goes again in previous state (manual + joint) and I need to press an jog button again on GUI to become MPG work.
The question is, what happens exactly if I press the action button with "machine.jog.axis:x,pos"? Is these the possibility to avoid joint mode?
Have you tried setting the button to checkable?
Please Log in or Create an account to join the conversation.
- KCJ
-

- Offline
- Moderator
-

Less
More
- Posts: 328
- Thank you received: 267
22 Dec 2019 20:23 - 22 Dec 2019 20:30 #153069
by KCJ
Replied by KCJ on topic Couple questions about QTPYVCP
When you press the "machine.jog.axis:x,pos" action button it checks if the machine is in teleoperating mode (Cartesian space or "axis" mode) and changes to that mode it if it not. See here: github.com/kcjengr/qtpyvcp/blob/1761babf...actions.py#L969-L971
If the MPG is connected to the "axis.n.jog-counts" pin and the machine is not in free (joint) mode, then the axis will not move. One solution might be to connect the jog counts to both the joint.n.jog-counts and the axis.n.jog-counts pins. This will cause the MPG to move the machine if it is in either teleop or free mode, and should be predictable if the machine has trivial kinematics.
EDIT: Another thing you need to check is that the machine is in manual mode before trying to jog. When you use the maco button it almost certainly switches the machine to MDI mode, you will have to switch it back manually.
If the MPG is connected to the "axis.n.jog-counts" pin and the machine is not in free (joint) mode, then the axis will not move. One solution might be to connect the jog counts to both the joint.n.jog-counts and the axis.n.jog-counts pins. This will cause the MPG to move the machine if it is in either teleop or free mode, and should be predictable if the machine has trivial kinematics.
EDIT: Another thing you need to check is that the machine is in manual mode before trying to jog. When you use the maco button it almost certainly switches the machine to MDI mode, you will have to switch it back manually.
Last edit: 22 Dec 2019 20:30 by KCJ.
The following user(s) said Thank You: Gnevko
Please Log in or Create an account to join the conversation.
- Gnevko
- Offline
- Senior Member
-

Less
More
- Posts: 59
- Thank you received: 10
22 Dec 2019 20:47 - 23 Dec 2019 05:57 #153071
by Gnevko
Replied by Gnevko on topic Couple questions about QTPYVCP
Thank you for quick response!
The MPG Driver always try to set the machine to manual mode before send a command to HAL (except auto mode of course). I spend the hole day to try debug and understand it")
At the moment the jog-count connections looks like that:
EDIT: KCJ you are right, I connected joint.n.jog-counts, but also joint.n.jog-enable, joint.n.jog-scale and joint.n.jog-vel-mode and now it works!
The MPG Driver always try to set the machine to manual mode before send a command to HAL (except auto mode of course). I spend the hole day to try debug and understand it
At the moment the jog-count connections looks like that:
net pdnt.axis.0.jog-counts whb.axis.0.jog-counts ilowpass.jog.x.in
net pdnt.axis.1.jog-counts whb.axis.1.jog-counts ilowpass.jog.y.in
net pdnt.axis.2.jog-counts whb.axis.2.jog-counts ilowpass.jog.z.in
net pdnt.axis.3.jog-counts whb.axis.3.jog-counts ilowpass.jog.a.in
net pdnt.ilowpass.jog.0.jog-counts ilowpass.jog.x.out axis.x.jog-counts
net pdnt.ilowpass.jog.1.jog-counts ilowpass.jog.y.out axis.y.jog-counts
net pdnt.ilowpass.jog.2.jog-counts ilowpass.jog.z.out axis.z.jog-counts
net pdnt.ilowpass.jog.3.jog-counts ilowpass.jog.a.out axis.a.jog-countEDIT: KCJ you are right, I connected joint.n.jog-counts, but also joint.n.jog-enable, joint.n.jog-scale and joint.n.jog-vel-mode and now it works!
Last edit: 23 Dec 2019 05:57 by Gnevko.
The following user(s) said Thank You: KCJ
Please Log in or Create an account to join the conversation.
- Leon82
- Offline
- Platinum Member
-
Less
More
- Posts: 592
- Thank you received: 79
27 Dec 2019 17:34 #153296
by Leon82
Replied by Leon82 on topic Couple questions about QTPYVCP
Is it possible to make an action button perform 2 actions?
Like
set jog increment.01 ;set jog mode.incremental
Like
set jog increment.01 ;set jog mode.incremental
Please Log in or Create an account to join the conversation.
- Leon82
- Offline
- Platinum Member
-
Less
More
- Posts: 592
- Thank you received: 79
30 Dec 2019 04:11 #153539
by Leon82
Replied by Leon82 on topic Couple questions about QTPYVCP
when i edit a file and save and go to run it doesn't always start at the top of the program.even if i click the cursor on line 1 and hit save
I may change run to run from line 1, unless i can set a signal to rewind the program
I may change run to run from line 1, unless i can set a signal to rewind the program
Please Log in or Create an account to join the conversation.
- hottabich
- Offline
- Platinum Member
-
Less
More
- Posts: 574
- Thank you received: 96
04 Jan 2020 07:30 - 04 Jan 2020 07:34 #153972
by hottabich
Replied by hottabich on topic Couple questions about QTPYVCP
Hello! Happy New Year everyone! I decided to make Qtpyvcp interface for linuxcnc. Based on Brender + mill_touch_v6 + probe_basic. Neither can I fix one error. Please help someone who can and if it's not difficult. Files are attached. Thank you in advance. In the attached file, we’ll remove the hobby_mill error L, two L does not solve the problem.
Скачать
Скачать
Last edit: 04 Jan 2020 07:34 by hottabich.
Please Log in or Create an account to join the conversation.
- Leon82
- Offline
- Platinum Member
-
Less
More
- Posts: 592
- Thank you received: 79
04 Jan 2020 10:52 #153979
by Leon82
Replied by Leon82 on topic Couple questions about QTPYVCP
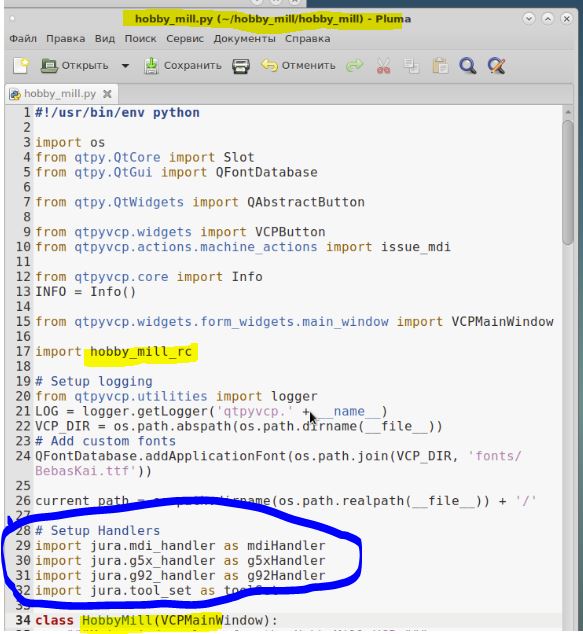
It's not finding the mdi handler.
You may have to tell it where to import it from.
I had to do it to get an image to work in the background after qcompile.
You may have to tell it where to import it from.
I had to do it to get an image to work in the background after qcompile.
Please Log in or Create an account to join the conversation.
- hottabich
- Offline
- Platinum Member
-
Less
More
- Posts: 574
- Thank you received: 96
05 Jan 2020 08:59 - 05 Jan 2020 09:01 #154082
by hottabich
Replied by hottabich on topic Couple questions about QTPYVCP
Download the file, unzip it to your home directory and install according to the attached instructions. Run the simulator and you will see everything. Thanks for attention.
Last edit: 05 Jan 2020 09:01 by hottabich.
Please Log in or Create an account to join the conversation.
- hottabich
- Offline
- Platinum Member
-
Less
More
- Posts: 574
- Thank you received: 96
10 Jan 2020 15:31 #154553
by hottabich
Replied by hottabich on topic Couple questions about QTPYVCP
I will supplement my question. In the home directory there are two identical VCP jura and Hobby Mill. Hobby Mill works when I prescribe import jura.mdi_handler as mdiHandler if import hobby_mill.mdi_handler, no named module. For some reason, he sees from a neighboring directory. Can this be fixed somehow? Without a directory, jura does not work.
Please Log in or Create an account to join the conversation.
- tecno
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
10 Jan 2020 15:47 #154554
by tecno
Maybe it is this that is wrong!
Replied by tecno on topic Couple questions about QTPYVCP
Maybe it is this that is wrong!
Attachments:
Please Log in or Create an account to join the conversation.
Moderators: KCJ, Lcvette
Time to create page: 1.159 seconds