New Trajectory Planner - Testers/programs wanted
- skunkworks
- Online
- Moderator
-

Less
More
- Posts: 350
- Thank you received: 153
09 Feb 2014 12:20 #43652
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
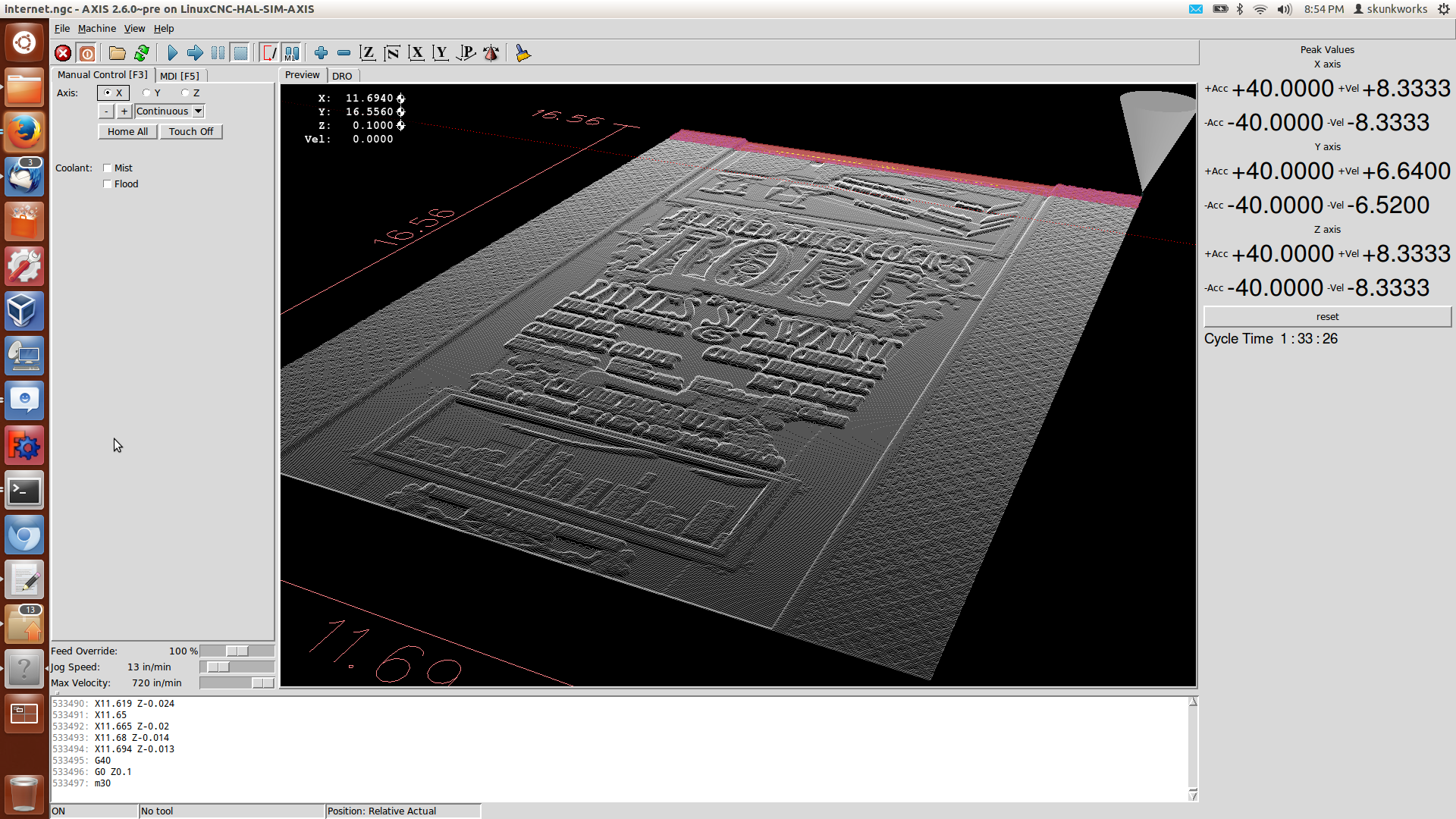
Here is an example showing how the new TP compares. This program is 533k lines long all short line segments.
G64P.0025Q.0025
Old TP
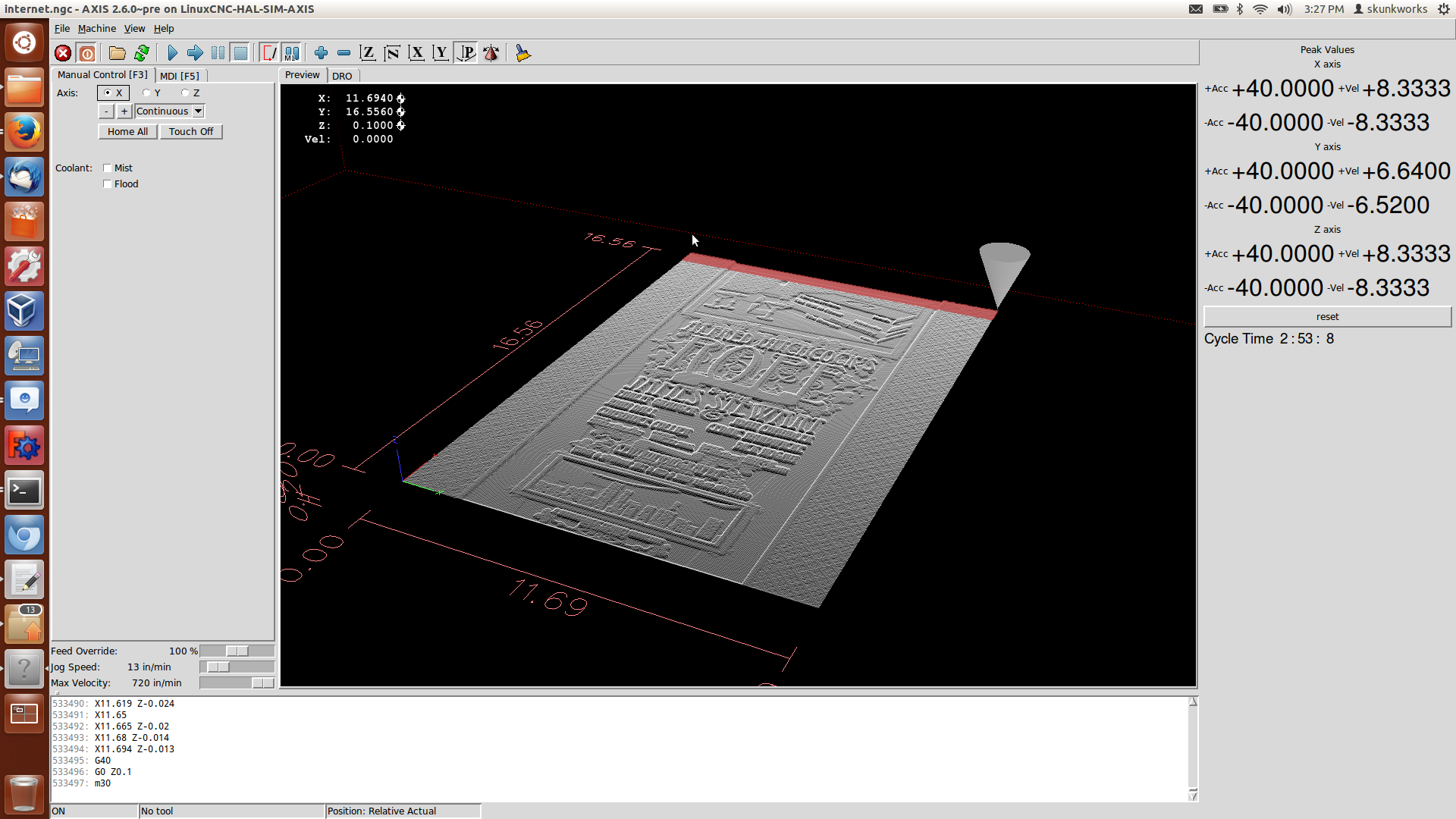
New TP
G64P.0025Q.0025
Old TP
New TP
Please Log in or Create an account to join the conversation.
- rellenberg
- Offline
- Junior Member
-

Less
More
- Posts: 37
- Thank you received: 10
11 Feb 2014 05:01 #43724
by rellenberg
Replied by rellenberg on topic New Trajectory Planner - Testers/programs wanted
This is good news! Is that config for a real machine?
I just pushed a few tweaks that should eliminate some acceleration hiccups. It wasn't handling the tail end of parabolic blends quite right, so there was a subtle stutter. Also, blend radii are a bit larger now to soften the acceleration pulses. When planning a blend arc, it checks what the equivalent-size parabolic blend would be, then allows the arc to be up to that size. Often the equivalent parabolic blend is longer, which means a larger-than-necessary blend radius, and lower accelerations. Of course, everything still obeys assigned tolerances, but hopefully this will be a bit gentler on the machine.
I just pushed a few tweaks that should eliminate some acceleration hiccups. It wasn't handling the tail end of parabolic blends quite right, so there was a subtle stutter. Also, blend radii are a bit larger now to soften the acceleration pulses. When planning a blend arc, it checks what the equivalent-size parabolic blend would be, then allows the arc to be up to that size. Often the equivalent parabolic blend is longer, which means a larger-than-necessary blend radius, and lower accelerations. Of course, everything still obeys assigned tolerances, but hopefully this will be a bit gentler on the machine.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Online
- Platinum Member
-

Less
More
- Posts: 4753
- Thank you received: 1458
11 Feb 2014 13:21 #43737
by Todd Zuercher
Replied by Todd Zuercher on topic New Trajectory Planner - Testers/programs wanted
Tonight I tried to install the new Trajectory planner, to test it on another machine, and I'm getting stuck folowing the the instructions at the top of this.
After commanding ./configure --enable-run-in-place
I get:
checking for libmodbus3... no
configure: error: libmodbus3 not found!
install with "sudo apt-get install libmodbus-dev" or disable with
"configure --without-libmodbus"
When I try sudo apt-get install libmodbus-dev
I get
Reading package lists... Done
Building dependency tree
Reading state information... Done
E: Couldn't find package libmodbus-dev
This particular machine I want to test with needs modbus to function, and is currently running master from buildbot in order to get mb2hal.
Where am I going wrong?
After commanding ./configure --enable-run-in-place
I get:
checking for libmodbus3... no
configure: error: libmodbus3 not found!
install with "sudo apt-get install libmodbus-dev" or disable with
"configure --without-libmodbus"
When I try sudo apt-get install libmodbus-dev
I get
Reading package lists... Done
Building dependency tree
Reading state information... Done
E: Couldn't find package libmodbus-dev
This particular machine I want to test with needs modbus to function, and is currently running master from buildbot in order to get mb2hal.
Where am I going wrong?
Please Log in or Create an account to join the conversation.
- cmorley
- Away
- Moderator
-
Less
More
- Posts: 7337
- Thank you received: 2161
11 Feb 2014 15:41 #43740
by cmorley
Replied by cmorley on topic New Trajectory Planner - Testers/programs wanted
You must be using 10.04?
There is a deb here for it I think:
linuxcnc.org/dists/lucid/base/binary-i386/
hard to find!
Chris M
There is a deb here for it I think:
linuxcnc.org/dists/lucid/base/binary-i386/
hard to find!
Chris M
The following user(s) said Thank You: Todd Zuercher
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Online
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
11 Feb 2014 21:17 #43752
by Todd Zuercher
Replied by Todd Zuercher on topic New Trajectory Planner - Testers/programs wanted
Yes, I'm using 10.04.
Are there any instal instructions for the less than gifted at using Linux? (much much less in my case)
Are there any instal instructions for the less than gifted at using Linux? (much much less in my case)
Please Log in or Create an account to join the conversation.
- Paul
- Offline
- Senior Member
-

Less
More
- Posts: 60
- Thank you received: 1
11 Feb 2014 21:39 #43755
by Paul
Todd - I'm running 10.04 and do not remember getting that error. I do have libmodbus5 and libmodbus-dev installed, though. I don't know if you want to try those or not.
HTH
Paul
Replied by Paul on topic New Trajectory Planner - Testers/programs wanted
Yes, I'm using 10.04.
Todd - I'm running 10.04 and do not remember getting that error. I do have libmodbus5 and libmodbus-dev installed, though. I don't know if you want to try those or not.
HTH
Paul
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Online
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
12 Feb 2014 10:36 #43787
by Todd Zuercher
Replied by Todd Zuercher on topic New Trajectory Planner - Testers/programs wanted
The other machine I tested on was a plain 2.5 from cd install, and I didn't have that problem either. This machine has been running from an original EMC2 2.4 install, that has been upgraded a few times to eventually be a master (from buildbot) install to use the generic modbus driver mb2hal. (that was about 6months ago).
Clicking on the link from CMorly (thanks) took care of the libmodbus-dev dependancy problem.
My first tests, with g64p0.005 were actually slower with the new TP than the old on the file I was using. Adding q0.005 only shaved 3 min off a 25min runtime and without it it was that much slower. Tomorrow I still need to retest it with the old TP and the same g64 settings, to try and get a better apples to oranges comparison.
I haven't ruled out the possibility I didn't install something correctly.
Clicking on the link from CMorly (thanks) took care of the libmodbus-dev dependancy problem.
My first tests, with g64p0.005 were actually slower with the new TP than the old on the file I was using. Adding q0.005 only shaved 3 min off a 25min runtime and without it it was that much slower. Tomorrow I still need to retest it with the old TP and the same g64 settings, to try and get a better apples to oranges comparison.
I haven't ruled out the possibility I didn't install something correctly.
Please Log in or Create an account to join the conversation.
- skunkworks
- Online
- Moderator
-
Less
More
- Posts: 350
- Thank you received: 153
12 Feb 2014 11:59 #43789
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
what kind of gcode? If there are a lot of non-tangent arc-line or arc-arc segments - it will run pretty closed to the current TP. Those type of segment transistions are not handled yet and fall back to the current parabolic - 1 segment look ahead.
sam
sam
The other machine I tested on was a plain 2.5 from cd install, and I didn't have that problem either. This machine has been running from an original EMC2 2.4 install, that has been upgraded a few times to eventually be a master (from buildbot) install to use the generic modbus driver mb2hal. (that was about 6months ago).
Clicking on the link from CMorly (thanks) took care of the libmodbus-dev dependancy problem.
My first tests, with g64p0.005 were actually slower with the new TP than the old on the file I was using. Adding q0.005 only shaved 3 min off a 25min runtime and without it it was that much slower. Tomorrow I still need to retest it with the old TP and the same g64 settings, to try and get a better apples to oranges comparison.
I haven't ruled out the possibility I didn't install something correctly.
Please Log in or Create an account to join the conversation.
- skunkworks
- Online
- Moderator
-
Less
More
- Posts: 350
- Thank you received: 153
12 Feb 2014 12:05 #43790
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
I have only been testing it virtually so far.. I have a router that I need to play with soon..
This program I have attached would probably be a good program for testing your non-tangent arc work...") (if I have not posted it already...) Lots of arc-line for sure..
(if I have not posted it already...) Lots of arc-line for sure..
This program I have attached would probably be a good program for testing your non-tangent arc work...
(if I have not posted it already...) Lots of arc-line for sure..This is good news! Is that config for a real machine?
I just pushed a few tweaks that should eliminate some acceleration hiccups. It wasn't handling the tail end of parabolic blends quite right, so there was a subtle stutter. Also, blend radii are a bit larger now to soften the acceleration pulses. When planning a blend arc, it checks what the equivalent-size parabolic blend would be, then allows the arc to be up to that size. Often the equivalent parabolic blend is longer, which means a larger-than-necessary blend radius, and lower accelerations. Of course, everything still obeys assigned tolerances, but hopefully this will be a bit gentler on the machine.
Please Log in or Create an account to join the conversation.
- cmorley
- Away
- Moderator
-
Less
More
- Posts: 7337
- Thank you received: 2161
12 Feb 2014 12:38 - 12 Feb 2014 12:40 #43791
by cmorley
just for others:
On that page look for the two libmodbus debs.
click on one and open/run it - it should ask about installing the deb - go ahead and install it.
Do the same for the other cause I'm not sure if you require both - it won't hurt.
Then try linuxcnc compiling again
Chris M
Replied by cmorley on topic New Trajectory Planner - Testers/programs wanted
Yes, I'm using 10.04.
Are there any instal instructions for the less than gifted at using Linux? (much much less in my case)
just for others:
On that page look for the two libmodbus debs.
click on one and open/run it - it should ask about installing the deb - go ahead and install it.
Do the same for the other cause I'm not sure if you require both - it won't hurt.
Then try linuxcnc compiling again
Chris M
Last edit: 12 Feb 2014 12:40 by cmorley.
Please Log in or Create an account to join the conversation.
Time to create page: 0.195 seconds