New Trajectory Planner - Testers/programs wanted
- rellenberg
- Offline
- Junior Member
-

Less
More
- Posts: 37
- Thank you received: 10
12 Feb 2014 13:10 #43793
by rellenberg
Replied by rellenberg on topic New Trajectory Planner - Testers/programs wanted
Hi Todd,
Can you post the code and config you're using? There are a few things I can think of that would case a slowdown in general:
Finally, are you running the beta branch or the experimental branch? I have made a bunch of minor improvements in the experimental branch, so you may see more improvement there.
Thanks for trying it out!
-Rob
Can you post the code and config you're using? There are a few things I can think of that would case a slowdown in general:
- Arcs have lower acceleration, because there were some blending cases that would allow acceleration overages. Right now I just cut the acceleration in half (this is the worst case solution), but there may be room for improvement here.
- I changed Naive CAM to be disabled by default, which may make programs run slower with the same setting. Specifically, G64 P0.005 in the original TP defaults to Q0.005 as well. However, this can in some cases lead to tolerances of up to 0.010", since Naive CAM and blending are both applied. It seemed more logical to make the tolerances be specified explicitly, so that the user knows exactly what they're getting.
Finally, are you running the beta branch or the experimental branch? I have made a bunch of minor improvements in the experimental branch, so you may see more improvement there.
Thanks for trying it out!
-Rob
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Offline
- Platinum Member
-

Less
More
- Posts: 4756
- Thank you received: 1459
12 Feb 2014 22:29 #43804
by Todd Zuercher
Replied by Todd Zuercher on topic New Trajectory Planner - Testers/programs wanted
I would assum the Beta branch (I just followed the instructions at the top of this topic).
What do I have to do different to try the Experimental branch?
Here is the code I was running (I don't think it has any arc segments)
And the machine config. (it is a large 3 axis gang router with 8 spindles, the modbus mess is for the spindle controls)
What do I have to do different to try the Experimental branch?
Here is the code I was running (I don't think it has any arc segments)
And the machine config. (it is a large 3 axis gang router with 8 spindles, the modbus mess is for the spindle controls)
Please Log in or Create an account to join the conversation.
- skunkworks
- Away
- Moderator
-

Less
More
- Posts: 350
- Thank you received: 153
13 Feb 2014 11:29 #43813
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
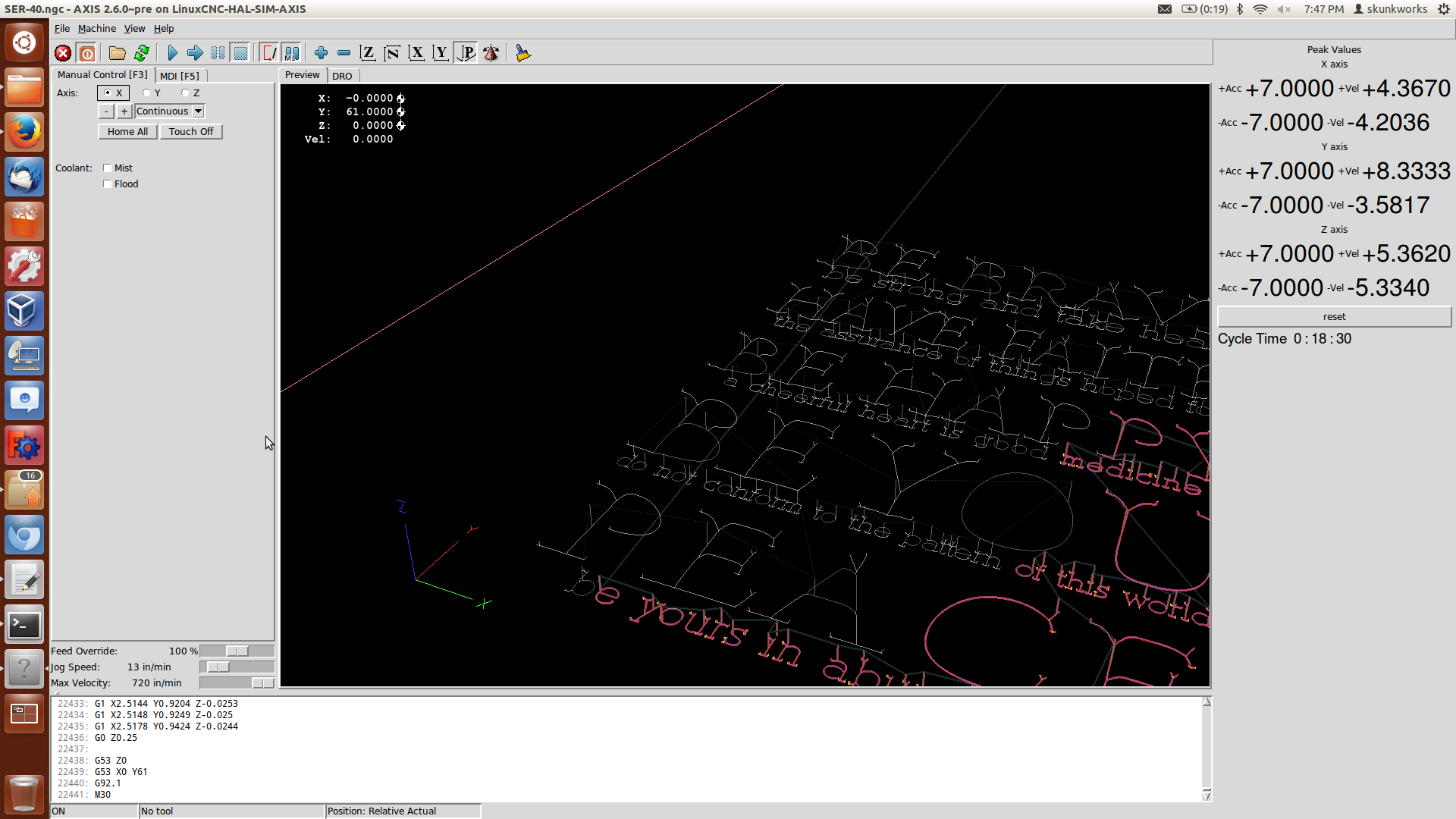
I did a quick test with your program. I just set my config to 7in/sec^2 (my max velocity is set to 500ipm vs I think your 600ipm) There is a lot of shuttling time between letters - that is really going to make the two tp's run closer as long strait runs are going to run close to the same between the two. Still - I think that is quite an improvement.. Did you put the needed lines in the ini?
ARC_BLEND_ENABLE = 1
ARC_BLEND_FALLBACK_ENABLE = 1
ARC_BLEND_OPTIMIZATION_DEPTH = 50
ARC_BLEND_SMOOTHING_THRESHOLD = 0.4
Old TP - 25min - 16sec

New TP - 18min - 30sec
ARC_BLEND_ENABLE = 1
ARC_BLEND_FALLBACK_ENABLE = 1
ARC_BLEND_OPTIMIZATION_DEPTH = 50
ARC_BLEND_SMOOTHING_THRESHOLD = 0.4
Old TP - 25min - 16sec
New TP - 18min - 30sec
Please Log in or Create an account to join the conversation.
- skunkworks
- Away
- Moderator
-
Less
More
- Posts: 350
- Thank you received: 153
13 Feb 2014 11:48 #43814
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
BTW - you can really see the improvement in the O in YOU. On the old TP and 7in/s^2 acc you barely got to 40ipm (programmed feed is 100ipm). With the new tp - it accelerates up to 100ipm and keeps it all the way around.
Cool beans!
sam
Cool beans!
sam
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4756
- Thank you received: 1459
13 Feb 2014 21:41 #43826
by Todd Zuercher
Replied by Todd Zuercher on topic New Trajectory Planner - Testers/programs wanted
You know the first time I tested, I ran it without the additions to the ini file, and it took over 40 min to run the file. With them, it runs 22 and a half. Now that you mention it, the config, I sent was a backup off our network and did not have the ini updates (oops).
Please Log in or Create an account to join the conversation.
- skunkworks
- Away
- Moderator
-
Less
More
- Posts: 350
- Thank you received: 153
25 Feb 2014 03:48 #44153
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
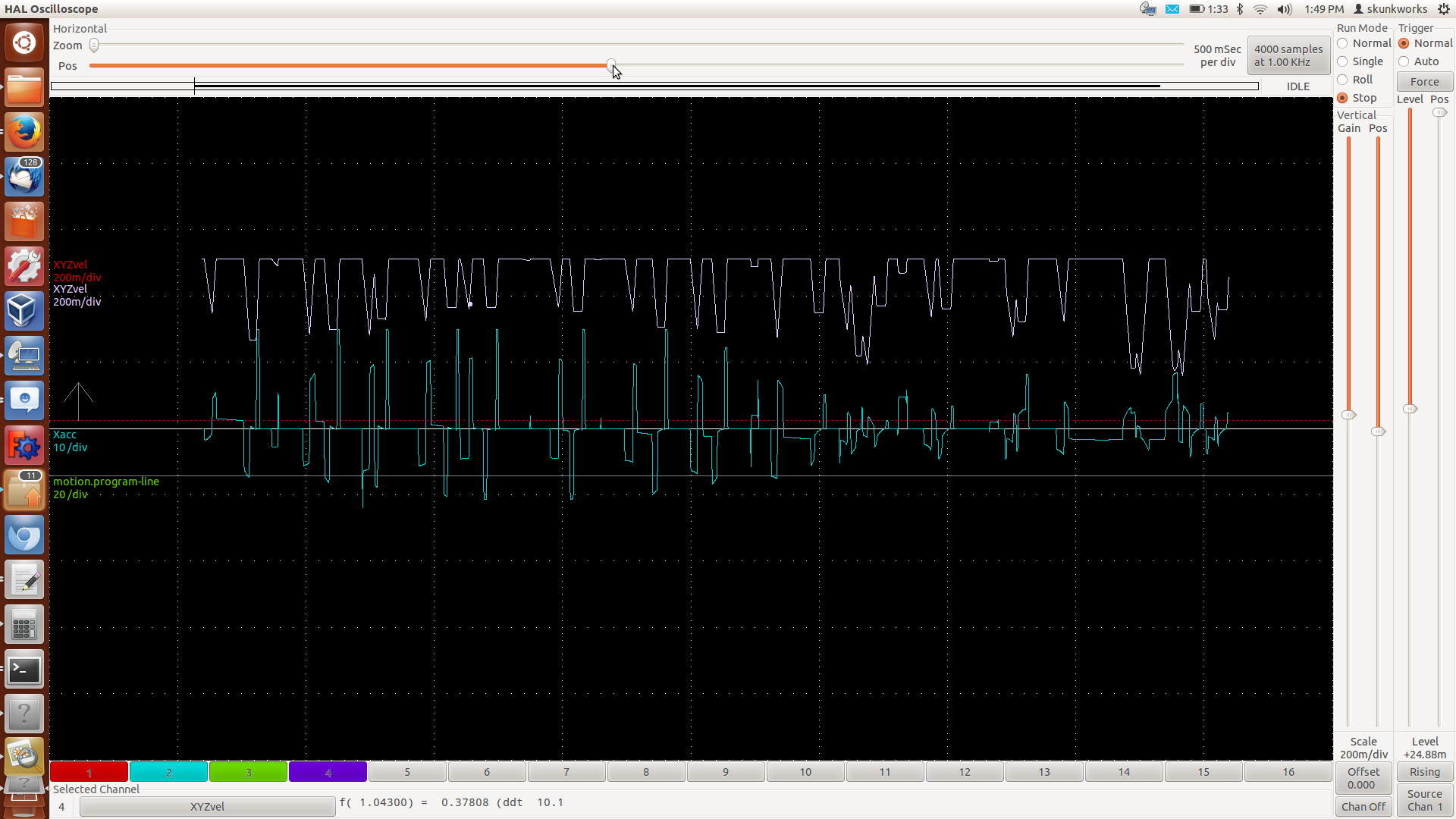
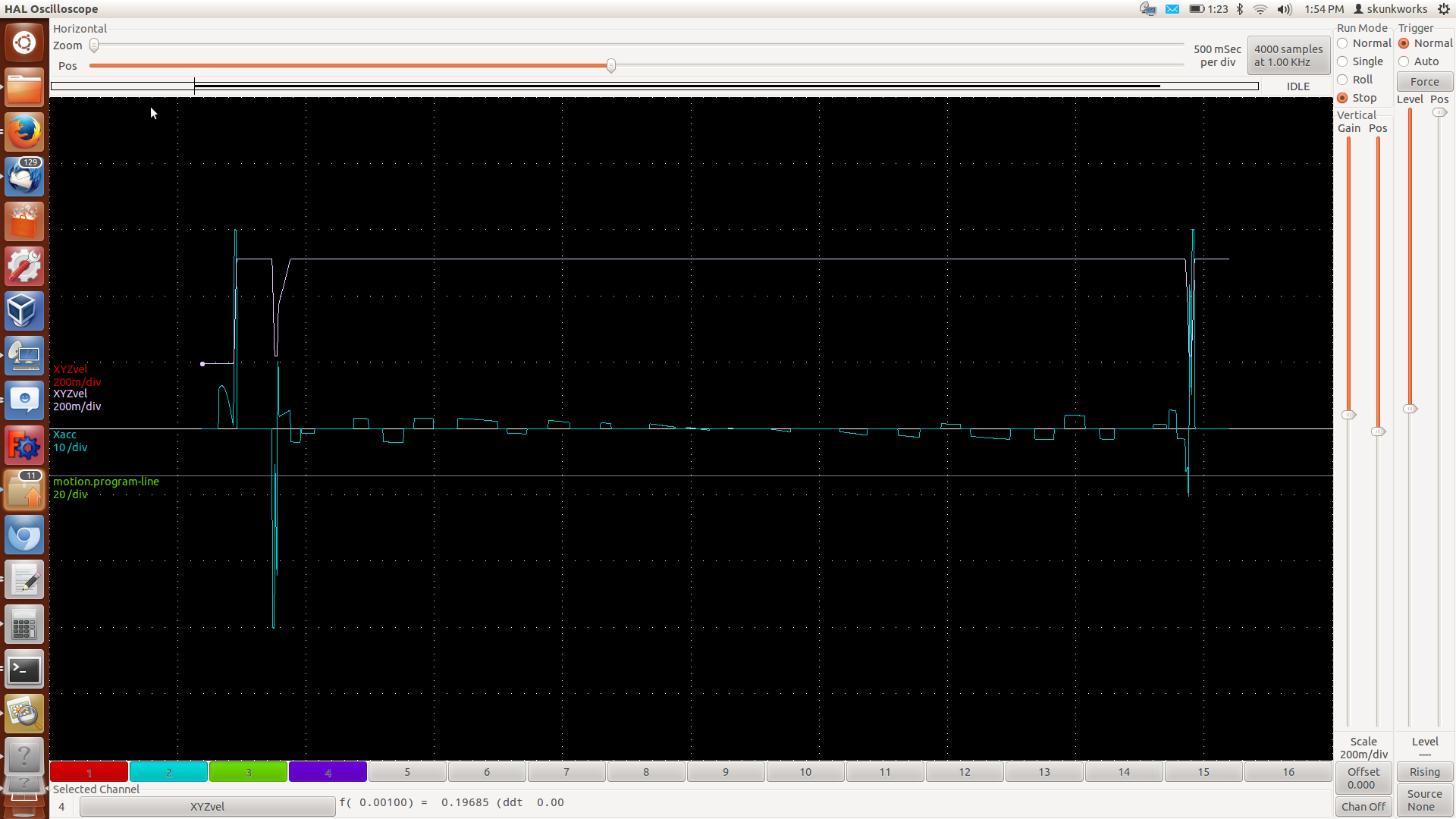
Here is a recent run of the new arc-cases-experimental which does non-tangent arc-arc and arc-line blending.. Rob - this has been working great - I have not had a violation.
Current TP

New TP

darn impressive! Notice the violations in master that rob fixed?")
Current TP
New TP
darn impressive! Notice the violations in master that rob fixed?
Please Log in or Create an account to join the conversation.
- awes
- Offline
- Junior Member
-
Less
More
- Posts: 20
- Thank you received: 3
04 Mar 2014 18:03 #44392
by awes
Replied by awes on topic New Trajectory Planner - Testers/programs wanted
Hi, installed and configured according to the first couple of posts in this thread.
When I run this program, it run wild after about 150 lines, not sure exactly where. It tries to move to a very large (small?) negative coordinate in all x,y and z. Must turn the machine off to stop it (not running the physical machine luckily, and it overriding softlimits). Trying to stop the program will not help, machine keeps on moving.
My ini and hal files.
When I run this program, it run wild after about 150 lines, not sure exactly where. It tries to move to a very large (small?) negative coordinate in all x,y and z. Must turn the machine off to stop it (not running the physical machine luckily, and it overriding softlimits). Trying to stop the program will not help, machine keeps on moving.
My ini and hal files.
Please Log in or Create an account to join the conversation.
- skunkworks
- Away
- Moderator
-
Less
More
- Posts: 350
- Thank you received: 153
04 Mar 2014 23:18 - 05 Mar 2014 05:06 #44399
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
The beta branch is now old...
I need to change the directions of the first post.. Rob just pushed his branch to linuxcnc.org. Yay!!! So bear with me.. This is what I did to switch back. (my git foo isn't very strong)
there should be debs building too in the near future...
(this is if you have been testing on rob git repository)
cd whateveryourlinuxcncRIPdirectoryis
git fetch origin
git branch --track circular-blend-arc-rc1 origin/circular-blend-arc-rc1
git checkout circular-blend-arc-rc1
cd src
make clean
./autogen.sh
./configure
make
sudo make setuid
cd ..
. ./scripts/rip-environment
linuxcnc
this should now be running the latest from rob.
your file..
sam
I need to change the directions of the first post.. Rob just pushed his branch to linuxcnc.org. Yay!!! So bear with me.. This is what I did to switch back. (my git foo isn't very strong)
there should be debs building too in the near future...
(this is if you have been testing on rob git repository)
cd whateveryourlinuxcncRIPdirectoryis
git fetch origin
git branch --track circular-blend-arc-rc1 origin/circular-blend-arc-rc1
git checkout circular-blend-arc-rc1
cd src
make clean
./autogen.sh
./configure
make
sudo make setuid
cd ..
. ./scripts/rip-environment
linuxcnc
this should now be running the latest from rob.
your file..
sam
Last edit: 05 Mar 2014 05:06 by skunkworks.
Please Log in or Create an account to join the conversation.
- awes
- Offline
- Junior Member
-
Less
More
- Posts: 20
- Thank you received: 3
05 Mar 2014 03:40 #44406
by awes
Replied by awes on topic New Trajectory Planner - Testers/programs wanted
Thanks Sam, works now.
Run same program in both beta and standard. Get the same runtime.
So I guess my example do not take advantage of this new thing.
Anders
Run same program in both beta and standard. Get the same runtime.
So I guess my example do not take advantage of this new thing.
Anders
Please Log in or Create an account to join the conversation.
- skunkworks
- Away
- Moderator
-
Less
More
- Posts: 350
- Thank you received: 153
05 Mar 2014 03:56 #44409
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
did you add the ini settings?
[TRAJ] section
ARC_BLEND_ENABLE = 1
ARC_BLEND_FALLBACK_ENABLE = 0
ARC_BLEND_OPTIMIZATION_DEPTH = 50
ARC_BLEND_GAP_CYCLES = 4
ARC_BLEND_RAMP_FREQ = 20
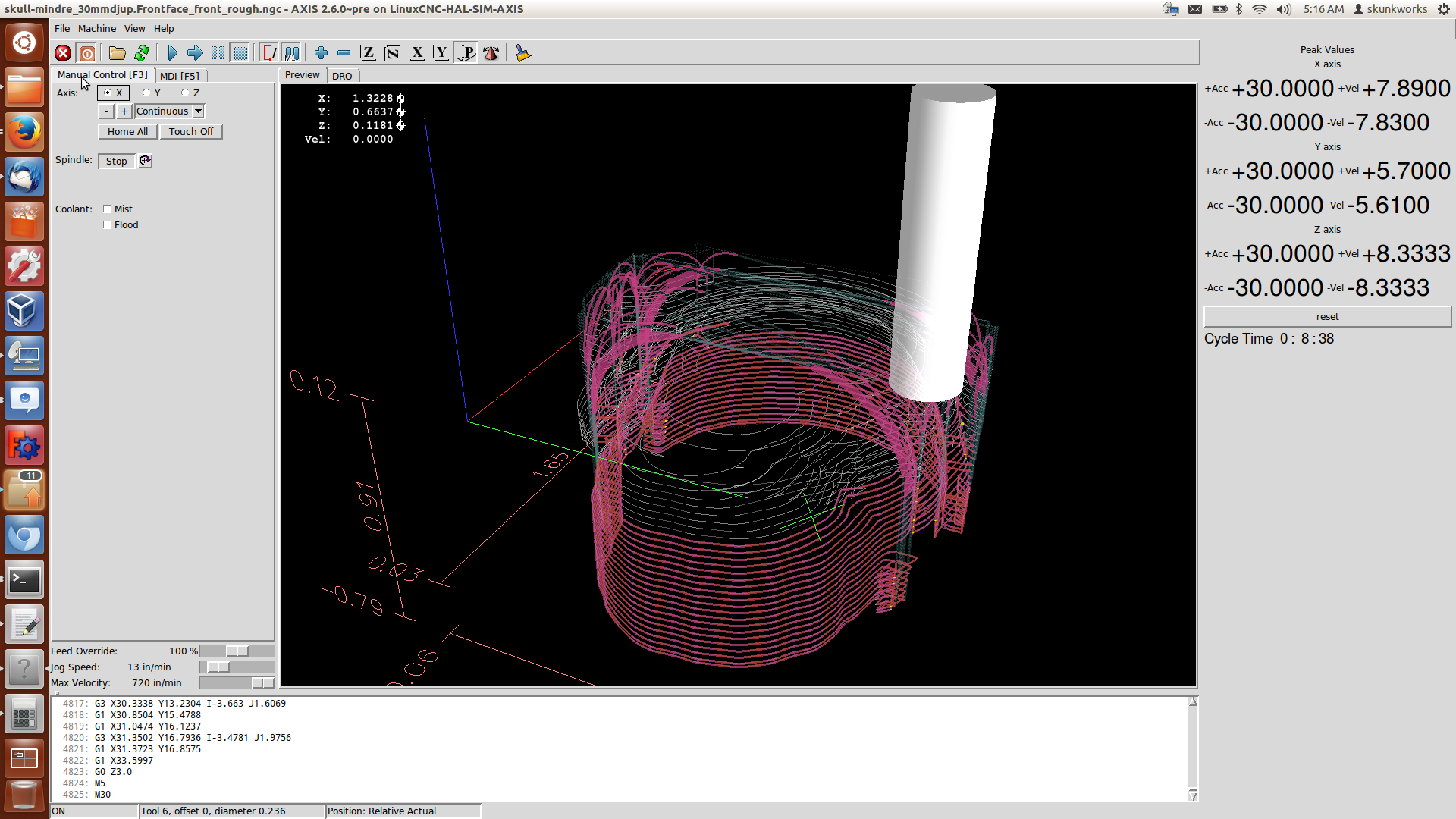
Depending on your acceleration - I think the path should be a lot smoother.. Using my config - 30in/s^2 (it ran a little over 1 minute faster.
This is current tp..
This is new tp.. It keeps the velocity up
[TRAJ] section
ARC_BLEND_ENABLE = 1
ARC_BLEND_FALLBACK_ENABLE = 0
ARC_BLEND_OPTIMIZATION_DEPTH = 50
ARC_BLEND_GAP_CYCLES = 4
ARC_BLEND_RAMP_FREQ = 20
Depending on your acceleration - I think the path should be a lot smoother.. Using my config - 30in/s^2 (it ran a little over 1 minute faster.
This is current tp..
This is new tp.. It keeps the velocity up
Please Log in or Create an account to join the conversation.
Time to create page: 1.773 seconds