TCP 5-axis kinematics
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21765
- Thank you received: 7438
02 Oct 2020 17:31 #184591
by tommylight
Replied by tommylight on topic TCP 5-axis kinematics
Very nice, thank you.
Please Log in or Create an account to join the conversation.
- Mkcherni
- Offline
- New Member
-

Less
More
- Posts: 14
- Thank you received: 1
05 Oct 2020 01:50 #184908
by Mkcherni
Replied by Mkcherni on topic TCP 5-axis kinematics
Id like to ask if the question if 3+2 / tilted workplane (hiedenhain G7 or fanuc G68.2) has been solved?
I see this is vital for 5 axis machining. Canned cycles and 2.5 D machining off-axis (undercuts in holes). Also for recovery as manual movement is in line with the spindle vector. This type of machining makes up 95% of muli axis machining, with rtcp rarely required other than some finish (swarf) machining. I know this because I am employed by the 5th largest aerospace tooling manufacturer globally and have machined many freeform tools with vacuum grooves and holes normal to the surface.
Some machines are delivered 3+2 only and require an upgrade (pay) to be allowed to do 5 axes simultaneously.
I see this is vital for 5 axis machining. Canned cycles and 2.5 D machining off-axis (undercuts in holes). Also for recovery as manual movement is in line with the spindle vector. This type of machining makes up 95% of muli axis machining, with rtcp rarely required other than some finish (swarf) machining. I know this because I am employed by the 5th largest aerospace tooling manufacturer globally and have machined many freeform tools with vacuum grooves and holes normal to the surface.
Some machines are delivered 3+2 only and require an upgrade (pay) to be allowed to do 5 axes simultaneously.
Please Log in or Create an account to join the conversation.
- Mkcherni
- Offline
- New Member
-
Less
More
- Posts: 14
- Thank you received: 1
05 Oct 2020 06:29 #184933
by Mkcherni
Replied by Mkcherni on topic TCP 5-axis kinematics
To add to the above post. My machine configuration is head/table the example max5 is basically my machine. 3+2 is necessary on a machine like this so that you can retract the tool along its axis regardless of the angle of rotation. with 3+2 active Z becomes a interpolation of X and Z and X becomes an interpolation of X and Z.
i think that i have read that UVW is the coordinate system relative to the tool but am unsure how to use them or weather they are relavent.
Heidenhain G7 uses Eulers rule to re-position work-plane/ref frame with or without rtcp active (movement of rotation axes around tool centre or not)
i hope this makes sense to somebody as i would really like to have this feature or something similar. The trig is simple enough would it be possible to use the userk function ?
on another note has anybody added switchkins to max5?
Sorry if i am all over the place but i have a lot to learn about linuxcnc.
Cheers
Matt
i think that i have read that UVW is the coordinate system relative to the tool but am unsure how to use them or weather they are relavent.
Heidenhain G7 uses Eulers rule to re-position work-plane/ref frame with or without rtcp active (movement of rotation axes around tool centre or not)
i hope this makes sense to somebody as i would really like to have this feature or something similar. The trig is simple enough would it be possible to use the userk function ?
on another note has anybody added switchkins to max5?
Sorry if i am all over the place but i have a lot to learn about linuxcnc.
Cheers
Matt
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4768
- Thank you received: 2138
05 Oct 2020 06:56 #184937
by Aciera
Replied by Aciera on topic TCP 5-axis kinematics
With switchkins you can rotate your table to the required angles and then switch to tcp which aligns your Z axis with your tool axis. I use this with a mechanical (indexing) swivel head to machine pockets in handrails for a stair maker.
I'm not sure if max5 kinematic has been adjusted for switchkins yet.
I'm not sure if max5 kinematic has been adjusted for switchkins yet.
Please Log in or Create an account to join the conversation.
- Mkcherni
- Offline
- New Member
-
Less
More
- Posts: 14
- Thank you received: 1
05 Oct 2020 07:17 #184939
by Mkcherni
Replied by Mkcherni on topic TCP 5-axis kinematics
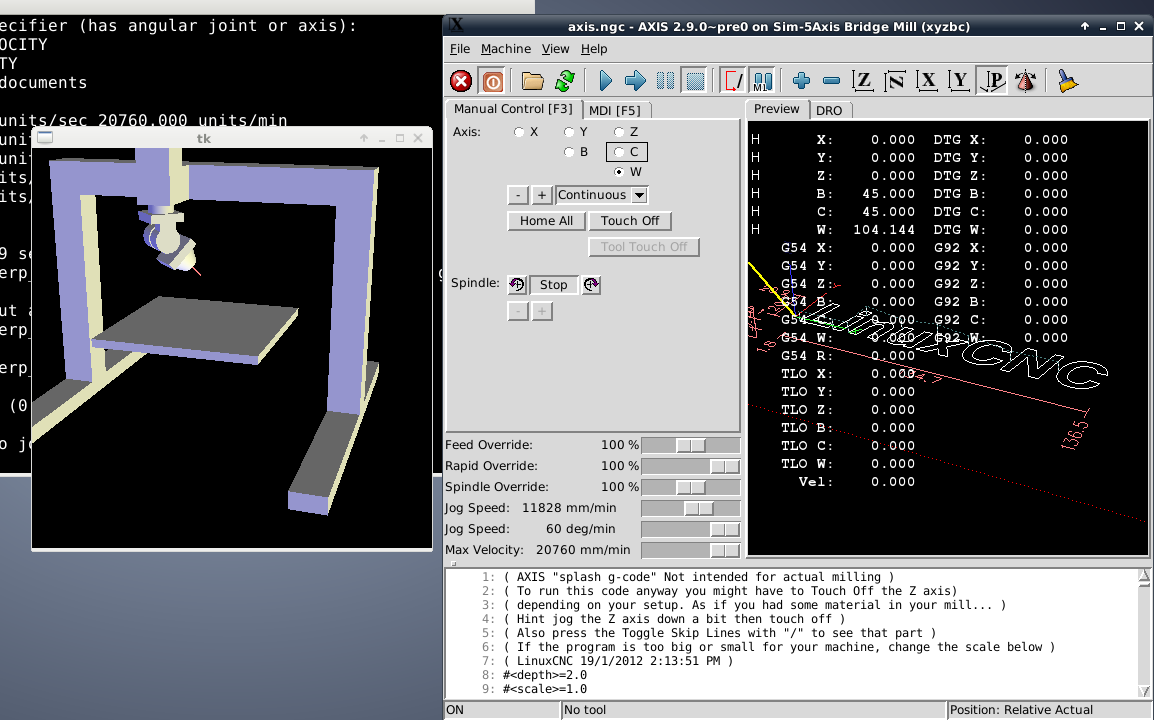
this gantry mill has part of the function i am trying to describe in that z axis becomes w and i assume that u and v can behave in the same manner ie perpendicular and at right angles to each other then be substituted as x y z when switched to 3 + 2
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4768
- Thank you received: 2138
05 Oct 2020 11:24 #184962
by Aciera
Replied by Aciera on topic TCP 5-axis kinematics
Ah, yes that's true, I had forgotten about the U,V,W axis implementation. However I'm uncertain as to how it is implemented. I wonder if W is handled in the kinematics of that gantry simulation.
Please Log in or Create an account to join the conversation.
- Guivdm
-

- Offline
- New Member
-
Less
More
- Posts: 1
- Thank you received: 0
04 Jun 2021 23:56 - 05 Jun 2021 00:01 #211182
by Guivdm
Replied by Guivdm on topic TCP 5-axis kinematics
Hello all,
I am a newbie on linuxcnc, Ihave made and configure a 5axis (XYZAC) machine, made an ATC,, auto tool length sensing, etc, etc, program everything and that works on the main branch in "normal" kinematic, with TCP configure, a limitation appears ( couldn´t move the rotary like i wanted to acheive what i needed), so i found this nice branch, very pleased with everything just I have troubles with more axes ( like controlling my ATC carousel ), well don´t work at all, before homing everything ok, I can move every axis linear and rotary, after homing, I lost my 6th axe , the W ( the carousel). I was trying to find something to send HAL command to move it, and no, i can´t find any info on that.
UVW are completely disabled with the switch kins mod I tried the dgarr/s_kinsv2 thinking V2 thinking it would be even better ?
any idea people ?
thank you !
Guillaume
I am a newbie on linuxcnc, Ihave made and configure a 5axis (XYZAC) machine, made an ATC,, auto tool length sensing, etc, etc, program everything and that works on the main branch in "normal" kinematic, with TCP configure, a limitation appears ( couldn´t move the rotary like i wanted to acheive what i needed), so i found this nice branch, very pleased with everything just I have troubles with more axes ( like controlling my ATC carousel ), well don´t work at all, before homing everything ok, I can move every axis linear and rotary, after homing, I lost my 6th axe , the W ( the carousel). I was trying to find something to send HAL command to move it, and no, i can´t find any info on that.
UVW are completely disabled with the switch kins mod I tried the dgarr/s_kinsv2 thinking V2 thinking it would be even better ?
any idea people ?
thank you !
Guillaume
Last edit: 05 Jun 2021 00:01 by Guivdm.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4768
- Thank you received: 2138
05 Jun 2021 06:13 - 05 Jun 2021 06:14 #211196
by Aciera
But maybe we could continue about dgarr/s_kinsv2 over here:
forum.linuxcnc.org/38-general-linuxcnc-q...witchable-kinematics
Replied by Aciera on topic TCP 5-axis kinematics
In dgarr/s_kinsv2 xyzac-trt and xyzbc-trt kinematics do handle all optional axis letters. (As long as they are specified in the ini file.UVW are completely disabled with the switch kins mod I tried the dgarr/s_kinsv2 thinking V2 thinking it would be even better ?
But maybe we could continue about dgarr/s_kinsv2 over here:
forum.linuxcnc.org/38-general-linuxcnc-q...witchable-kinematics
Last edit: 05 Jun 2021 06:14 by Aciera.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
08 Jun 2021 14:05 #211510
by andypugh
Replied by andypugh on topic TCP 5-axis kinematics
It often makes more sense to not have the carousel as an axis. Have you seen the "carousel" HAL component, which is intended to take control of the tool changer and its motor?
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- daidai
- Offline
- New Member
-
Less
More
- Posts: 14
- Thank you received: 3
02 Jul 2021 13:45 #213494
by daidai
Replied by daidai on topic TCP 5-axis kinematics
I'm using switchkins. I am impressed with your efforts.
I made a machine with Y-axis gantry.
I want to make the Y-axis home switch separate on the left and right to make it square automatically, but it seems that I can not increase the number of joints.
What should I do?
I made a machine with Y-axis gantry.
I want to make the Y-axis home switch separate on the left and right to make it square automatically, but it seems that I can not increase the number of joints.
What should I do?
Please Log in or Create an account to join the conversation.
Time to create page: 0.144 seconds