TCP 5-axis kinematics
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19879
- Thank you received: 4644
23 Jun 2022 23:32 #245741
by andypugh
Replied by andypugh on topic TCP 5-axis kinematics
What would you expect them to do in a trivial kinematics?
I am only guessing what it is that you want to do, but possibly you could modify your HOME_OFFSET in the INI to put the absolute origin in the centre, then you could have zero offsets in the TCP kins and the trivkins origin would match.
Or, you could add an offset to a custom version of trivkins.
I am only guessing what it is that you want to do, but possibly you could modify your HOME_OFFSET in the INI to put the absolute origin in the centre, then you could have zero offsets in the TCP kins and the trivkins origin would match.
Or, you could add an offset to a custom version of trivkins.
Please Log in or Create an account to join the conversation.
- mittim
-

- Offline
- Premium Member
-

Less
More
- Posts: 92
- Thank you received: 5
24 Jun 2022 08:41 - 24 Jun 2022 08:42 #245763
by mittim
Replied by mittim on topic TCP 5-axis kinematics
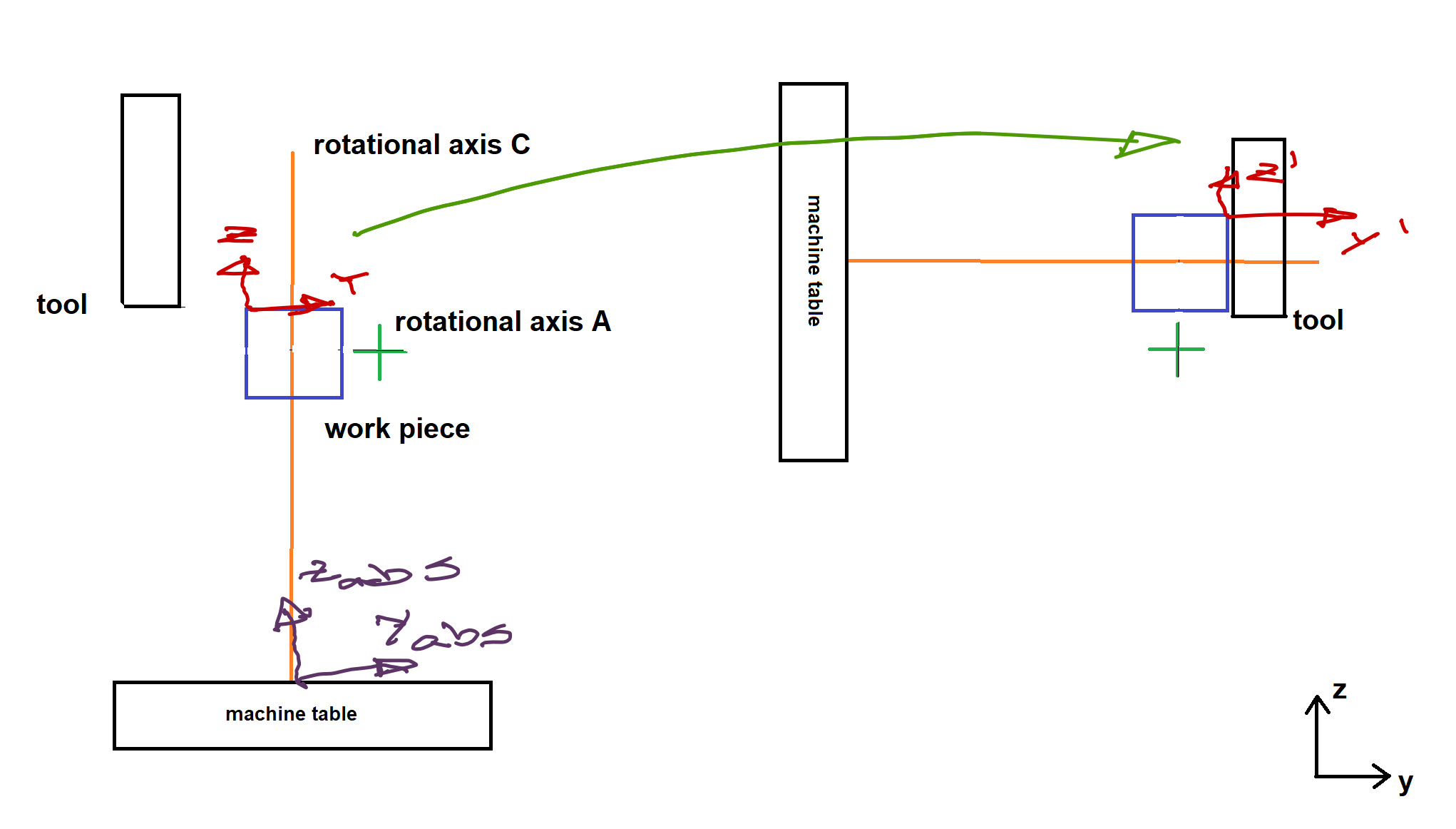
I have an offset of Dy in my machine, as shown in the picture. I want to compensate that with the Dy offset, which is usable in xyzac-trt-kins. So, in some way, I want to compensate the mismatch between axis C and Axis A, as they do not intersect each other, but without using inverse kinematics such as trt-kins.
I want to use forward kinematics such as trivkins and compensate my mechanical error. I have an xyzac machine. So, when rotating A, Z and Y would have to compensate the tip of the tool. Just like it is already implemented in trt-kins.
I want to use forward kinematics such as trivkins and compensate my mechanical error. I have an xyzac machine. So, when rotating A, Z and Y would have to compensate the tip of the tool. Just like it is already implemented in trt-kins.
Last edit: 24 Jun 2022 08:42 by mittim.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4644
24 Jun 2022 09:22 #245765
by andypugh
Replied by andypugh on topic TCP 5-axis kinematics
How is this different from using work offsets or tool offsets?I want to use forward kinematics such as trivkins and compensate my mechanical error. I have an xyzac machine. So, when rotating A, Z and Y would have to compensate the tip of the tool. Just like it is already implemented in trt-kins.
Please Log in or Create an account to join the conversation.
- mittim
-
- Offline
- Premium Member
-
Less
More
- Posts: 92
- Thank you received: 5
24 Jun 2022 10:42 #245767
by mittim
Replied by mittim on topic TCP 5-axis kinematics
Maybe I have a wrong understanding of work offsets, but to my understanding, work offsets are not able to compensate for not intersecting axis of A and C. I made a sketch, that maybe helps understanding my problem.
In this simple example: For the tool being able to mill each side, it has to compensate its length according to the position of the A axis. Just like trt-kinematics is already doing when staying at XYZAC=0,0,0,0,0. I want to use this feature in simple forward kinematics.
I am not all too familiar with the code behind the kinematic modules, but to my understanding, X would just stay the same and every entry in Y and Z, which takes the rotation of C into account, could be ignored.
In this simple example: For the tool being able to mill each side, it has to compensate its length according to the position of the A axis. Just like trt-kinematics is already doing when staying at XYZAC=0,0,0,0,0. I want to use this feature in simple forward kinematics.
I am not all too familiar with the code behind the kinematic modules, but to my understanding, X would just stay the same and every entry in Y and Z, which takes the rotation of C into account, could be ignored.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4644
24 Jun 2022 23:50 #245819
by andypugh
Replied by andypugh on topic TCP 5-axis kinematics
The thing is, only you know what you want to happen.
I _think_ that you can get what you want by tweaking the HOME_OFFSET in the INI.
But, "trivkins" is really a "no kins" where joints and axes are identical.
But explain to me like I have one minute to understand. Because there are only so many hours in the day and the forum is busy,
I _think_ that you can get what you want by tweaking the HOME_OFFSET in the INI.
But, "trivkins" is really a "no kins" where joints and axes are identical.
But explain to me like I have one minute to understand. Because there are only so many hours in the day and the forum is busy,
Please Log in or Create an account to join the conversation.
- Aciera
-

- Away
- Administrator
-

Less
More
- Posts: 4762
- Thank you received: 2135
25 Jun 2022 07:46 #245844
by Aciera
Replied by Aciera on topic TCP 5-axis kinematics
Do you want the position of the work origin to move with the rotation of A with Z remaining colinear with the tool as in the attached sketch?
Attachments:
Please Log in or Create an account to join the conversation.
- mittim
-
- Offline
- Premium Member
-
Less
More
- Posts: 92
- Thank you received: 5
25 Jun 2022 09:16 #245847
by mittim
Replied by mittim on topic TCP 5-axis kinematics
Sorry for my bad explanation.
@Aciera: Yes, that is exactly what I want to implement.
@Aciera: Yes, that is exactly what I want to implement.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Away
- Administrator
-
Less
More
- Posts: 4762
- Thank you received: 2135
25 Jun 2022 12:36 - 25 Jun 2022 12:37 #245851
by Aciera
Replied by Aciera on topic TCP 5-axis kinematics
Presuming that this is used in indexing mode only (ie the A axis does not move while the tool is cutting) it seems to me the most straight forward solution would be to move the work offsets (in Y and Z) according to the change in the A axis.
One approach would be to define a custom G command for the rotation of the A axis and calculate the required change in the current work offset values.
One approach would be to define a custom G command for the rotation of the A axis and calculate the required change in the current work offset values.
Last edit: 25 Jun 2022 12:37 by Aciera.
Please Log in or Create an account to join the conversation.
- jjdege
-

- Offline
- Premium Member
-
Less
More
- Posts: 125
- Thank you received: 37
04 Jul 2022 16:19 #246584
by jjdege
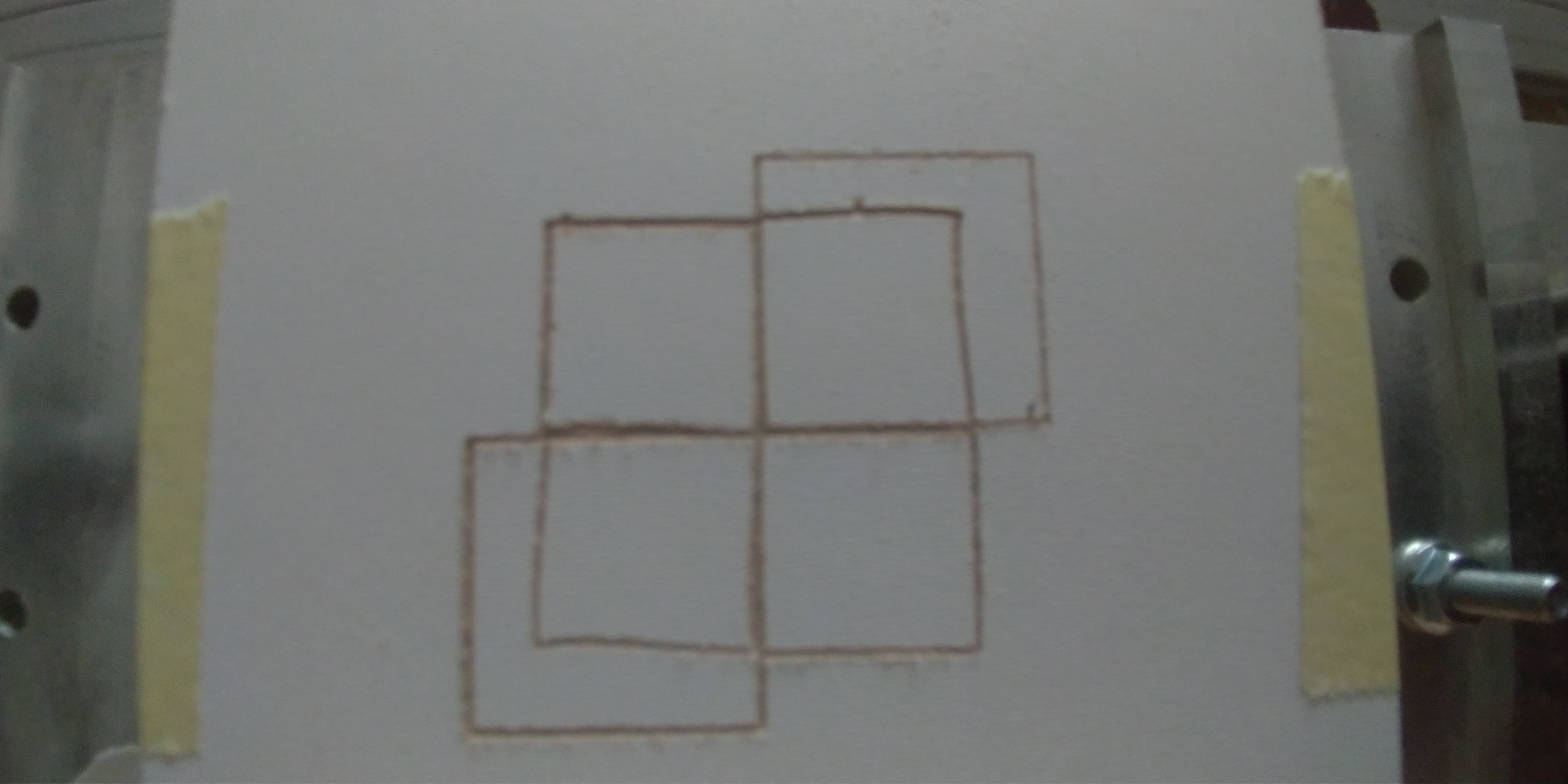 Good morning sorry for the english, but I have to translate it with google Thanks to everyone for the ideas on using LinuxCNC that can be found here. I managed to set up the 5 axis kinematics on my home made cnc, but I can't to solve a problem, using the test file made available by plopes 9000, i can't understand why when xyzc interpolation happens, something is wrong, the two squares are deformed, I attach photos help thanks
Good morning sorry for the english, but I have to translate it with google Thanks to everyone for the ideas on using LinuxCNC that can be found here. I managed to set up the 5 axis kinematics on my home made cnc, but I can't to solve a problem, using the test file made available by plopes 9000, i can't understand why when xyzc interpolation happens, something is wrong, the two squares are deformed, I attach photos help thanks
Replied by jjdege on topic TCP 5-axis kinematics
Attachment not found
Attachment not found
Attachments:
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4644
05 Jul 2022 00:01 #246618
by andypugh
Replied by andypugh on topic TCP 5-axis kinematics
It looks like either some of the distances are not quite correct, or possibly the mechanics are not perfectly linear.
Try making a 2% change to the Y offset, and see if things get better (in which case do it some more) or worse (in which case go the other way).
Then try the same with the Z offset.
All assuming that I have remembered correctly that this kinematics has those adjustments.
Try making a 2% change to the Y offset, and see if things get better (in which case do it some more) or worse (in which case go the other way).
Then try the same with the Z offset.
All assuming that I have remembered correctly that this kinematics has those adjustments.
Please Log in or Create an account to join the conversation.
Time to create page: 0.375 seconds