TCP 5-axis kinematics
- JackRay
- Offline
- Elite Member
-

- Posts: 226
- Thank you received: 14
indeed, I had not thought about it but I master python well enough, and it is very easy to change the A in B. Now I will see if I can't do it directly on the pos processor.
Thanks for your help ... again
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
- Posts: 226
- Thank you received: 14
I was able to change the name of my axis from A to B, quite easily in my post processor . Now everything works correctly.
Thanks again for your help.
Please Log in or Create an account to join the conversation.
- akg1904
- Offline
- Premium Member
-

- Posts: 104
- Thank you received: 4
I got my 5-axis up and running but when I run a 5-axis demo the simulator shows some bizarre figure which does not match our demo figure at all.
Now i don't know what might have gone wrong
Does anyone have any idea why it is showing like this?
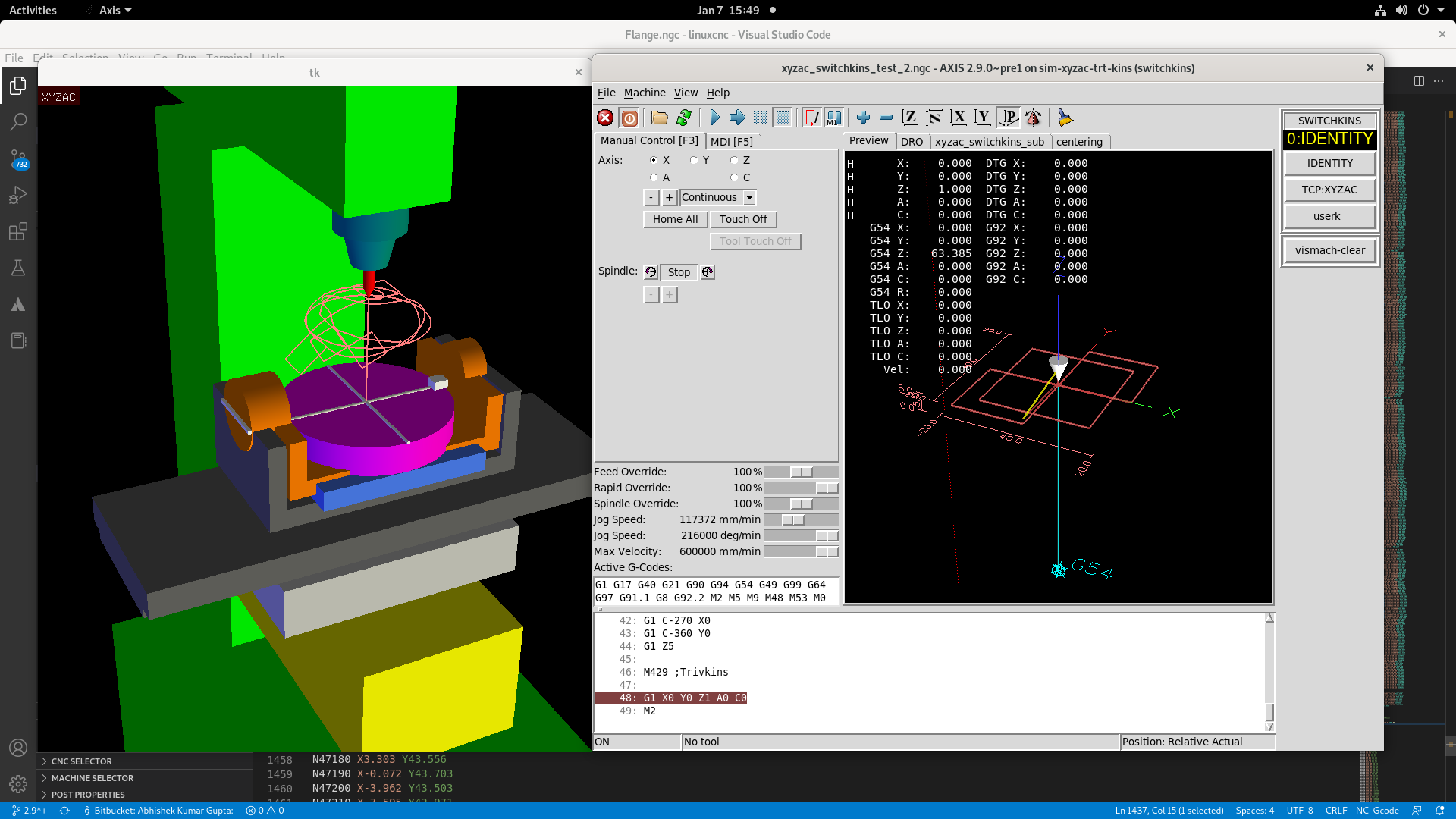
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

- Posts: 4766
- Thank you received: 2138
[edit]
Just a stab in the dark, but for the simulation to work you must not change these values in the ini file:
# not currently supported by xyzac-trt-gui:
HALCMD = setp xyzac-trt-kins.x-rot-point 0
HALCMD = setp xyzac-trt-kins.y-rot-point 0
HALCMD = setp xyzac-trt-kins.z-rot-point 0Please Log in or Create an account to join the conversation.
- akg1904
- Offline
- Premium Member
-
- Posts: 104
- Thank you received: 4
Thank you for quick reply.
I haven't change anything apart from velocity and acceleration.
I don't think it should have any impact on the shape of the simulation
Regards
Abhishek
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4766
- Thank you received: 2138
Attachments:
Please Log in or Create an account to join the conversation.
- akg1904
- Offline
- Premium Member
-
- Posts: 104
- Thank you received: 4
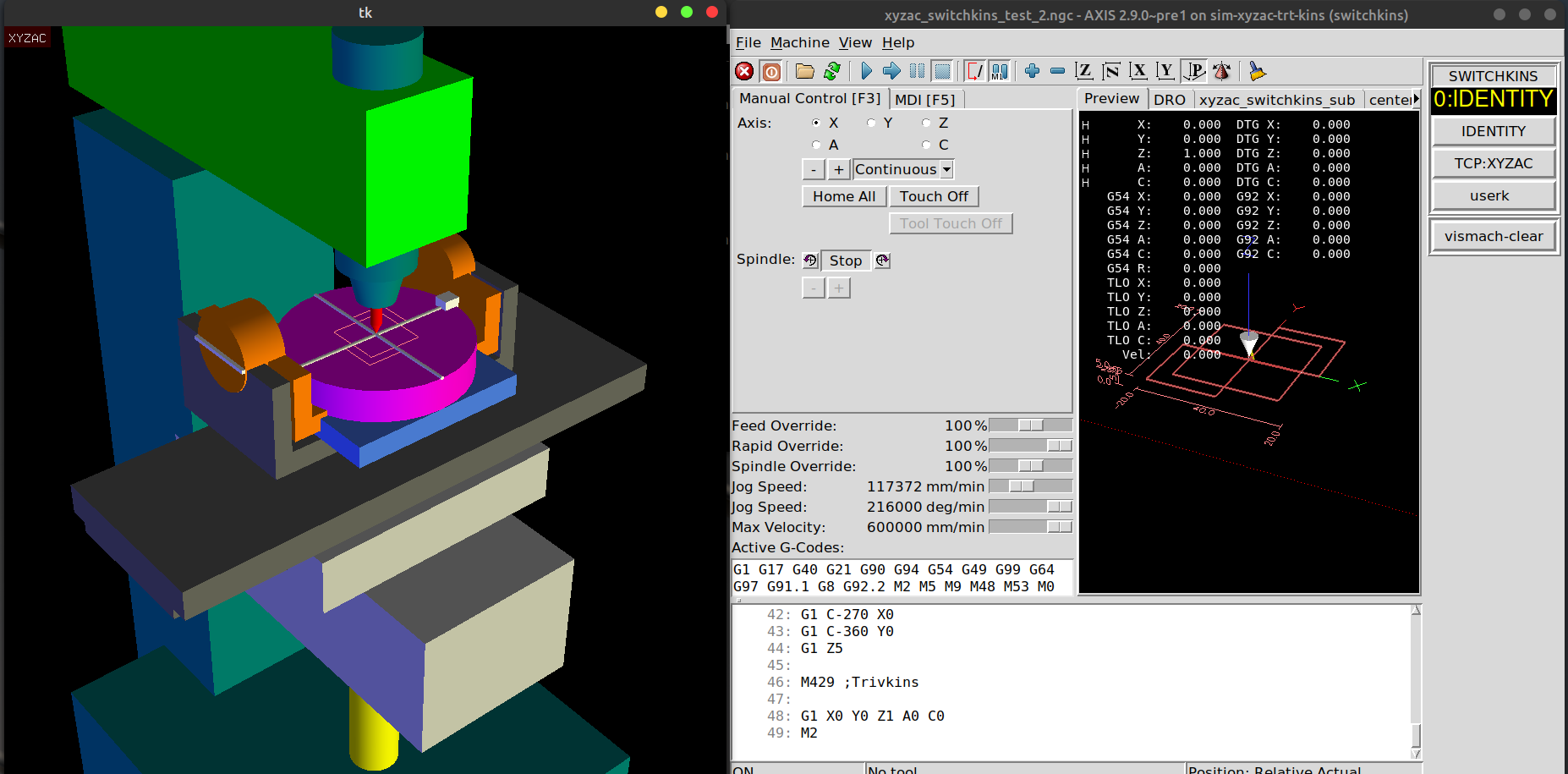
So, the "INI" file is perfectly fine, I went through some causes of error and i think it might be related to one of the two things I mentioned below:
- There might be some error in "xyzac-trt-gui.py" for "tk" which is accountable for simulation working.
- Or it might be that there is some mapping problem in kinematics.
If you have any other places where the simulation could break please share with me.
If possible can you share the link of the branch from where you got your linuxCNC.
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4766
- Thank you received: 2138
One way to troubleshoot is to start the HAL configuration tool in the linuxcnc menu and check the pin values for "table-x" and "saddle-y" for the gui and the kins modules.
I just checked the vismach model code you posted and it's identical to the one in my installation.
If that is the actual file you are using I have no explanation for what you are seeing. It's rather unlikely to be due to some tkinter error as I would expect that in that case the config would not run at all.
I'll attach the compessed sim folder here so you can unzip and drop that into your installation tree. Note that the vismach model and the kinematics are not included but I doubt that those are the root of the problem if you haven't change them.
[edit]
Have you tried any of the other vismach sim configs?
Attachments:
Please Log in or Create an account to join the conversation.
- akg1904
- Offline
- Premium Member
-
- Posts: 104
- Thank you received: 4
I am trying to get xyzac working in my machine and for the most part everything seems fine.
When I try to align the z axis with a point (10 cm ~ the same distance as when a fixture is fit on the bed) above my bed and then switch over to xyzac kinematics and jog only the a axis I notice that z and a are not following each other.
How do I begin to calibrate the axis for xyzac mode?
Thanks in advance,
Abhishek
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

- Posts: 19886
- Thank you received: 4645
linuxcnc.org/docs/html/motion/5-axis-kin...inematics_components
set offset parameters
net :tool-offset motion.tooloffset.z xyzac-trt-kins.tool-offset
setp xyzac-trt-kins.y-offset 0
setp xyzac-trt-kins.z-offset 20
Please Log in or Create an account to join the conversation.