TCP 5-axis kinematics
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4724
- Thank you received: 2117
08 Feb 2023 12:17 #264028
by Aciera
Replied by Aciera on topic TCP 5-axis kinematics
Actually this last video looks a lot more like what I would expect (see my screen shot in my last post). Although there still seems to be a misconfiguration although a much smaller one.
So is this with the machine at XYZ -absolute zero (G53 x0y0z0) and no tool-length offset applied (ie g49)? Can you maybe take a shot of the DRO as well?
If that is happening with the machine at the xyz-home position then it's really not clear to me as to why you would need to enter an inverted offset compared to my sim.
So is this with the machine at XYZ -absolute zero (G53 x0y0z0) and no tool-length offset applied (ie g49)? Can you maybe take a shot of the DRO as well?
If that is happening with the machine at the xyz-home position then it's really not clear to me as to why you would need to enter an inverted offset compared to my sim.
Please Log in or Create an account to join the conversation.
- akg1904
- Offline
- Premium Member
-

Less
More
- Posts: 104
- Thank you received: 4
08 Feb 2023 13:10 #264041
by akg1904
Replied by akg1904 on topic TCP 5-axis kinematics
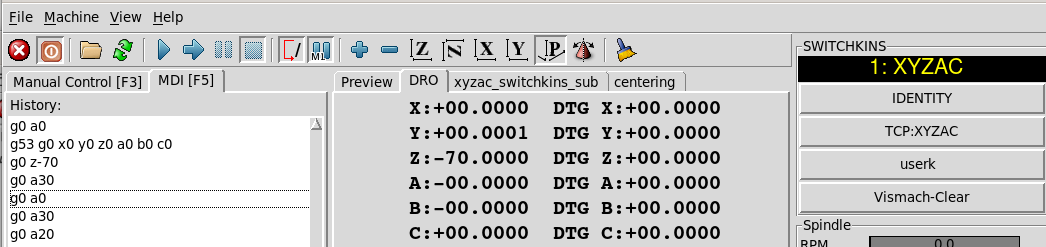
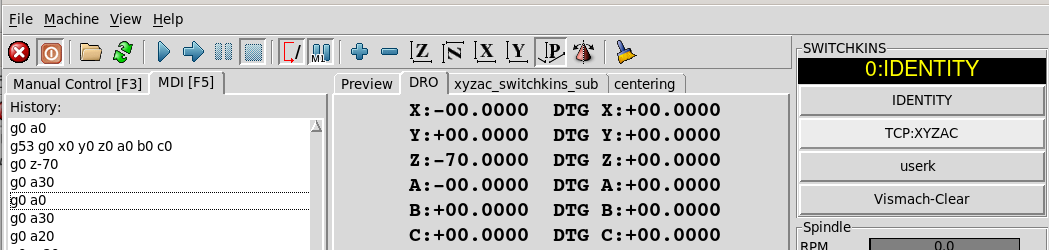
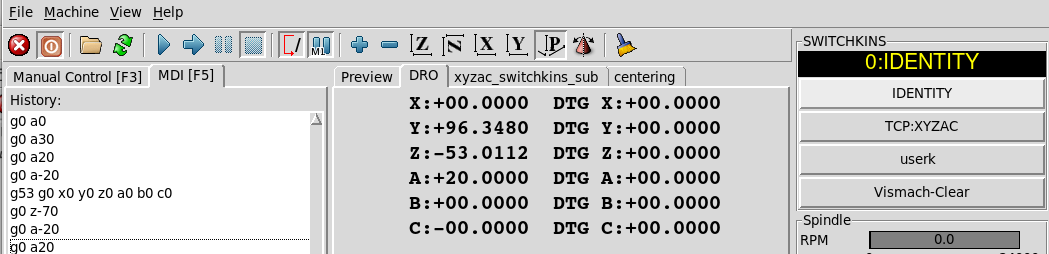
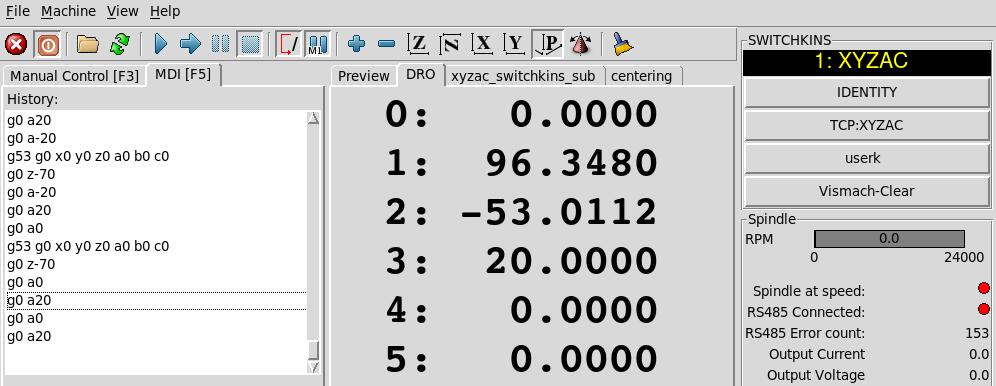
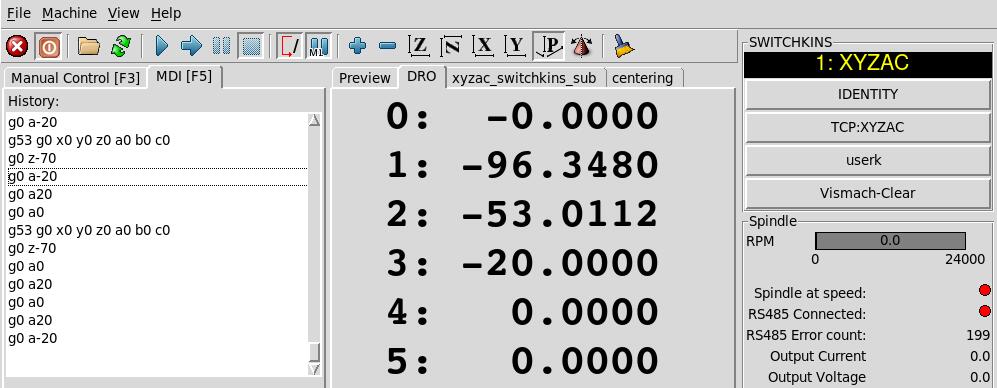
Here are screenshots of 'G0 X0 Y0 Z-70 A0' in TCP:XYZAC kins.
I've also toggled to identity to show the actual positions.
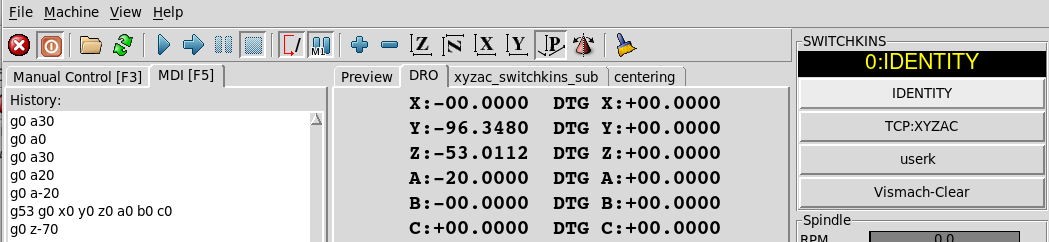
The same for 'G0 X0 Y0 Z-70 A-20'

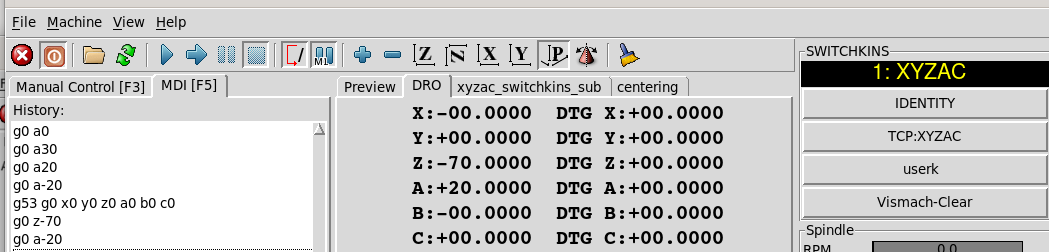
The same for 'G0 X0 Y0 Z-70 A20'
I've also toggled to identity to show the actual positions.
The same for 'G0 X0 Y0 Z-70 A-20'
The same for 'G0 X0 Y0 Z-70 A20'
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4724
- Thank you received: 2117
08 Feb 2023 13:42 #264046
by Aciera
Replied by Aciera on topic TCP 5-axis kinematics
Hm, your DRO seems somewhat oddly formatted, I have never seen +00.000 and -00.000.
Anyway you can switch to 'Manual Control' and press '$' on the keyboard that should give you the joint positions in your DRO. Maybe you could post those as well.
Anyway you can switch to 'Manual Control' and press '$' on the keyboard that should give you the joint positions in your DRO. Maybe you could post those as well.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4724
- Thank you received: 2117
08 Feb 2023 14:20 #264049
by Aciera
Replied by Aciera on topic TCP 5-axis kinematics
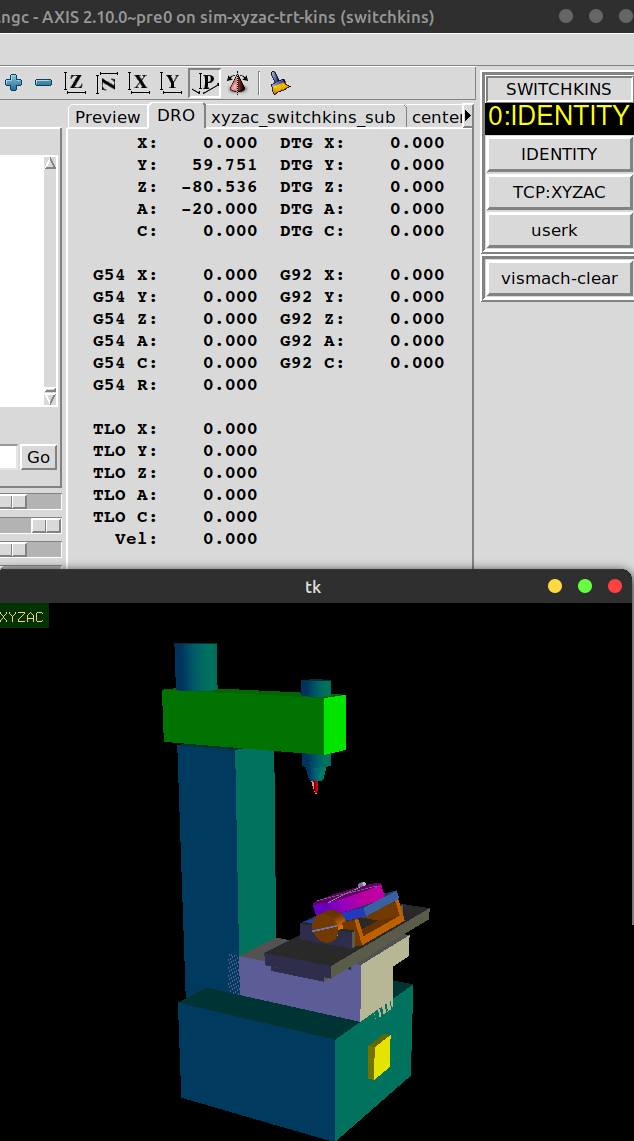
In my simulation I get these results:
Attachments:
Please Log in or Create an account to join the conversation.
- akg1904
- Offline
- Premium Member
-
Less
More
- Posts: 104
- Thank you received: 4
09 Feb 2023 07:39 - 09 Feb 2023 07:51 #264109
by akg1904
Replied by akg1904 on topic TCP 5-axis kinematics
Hi,
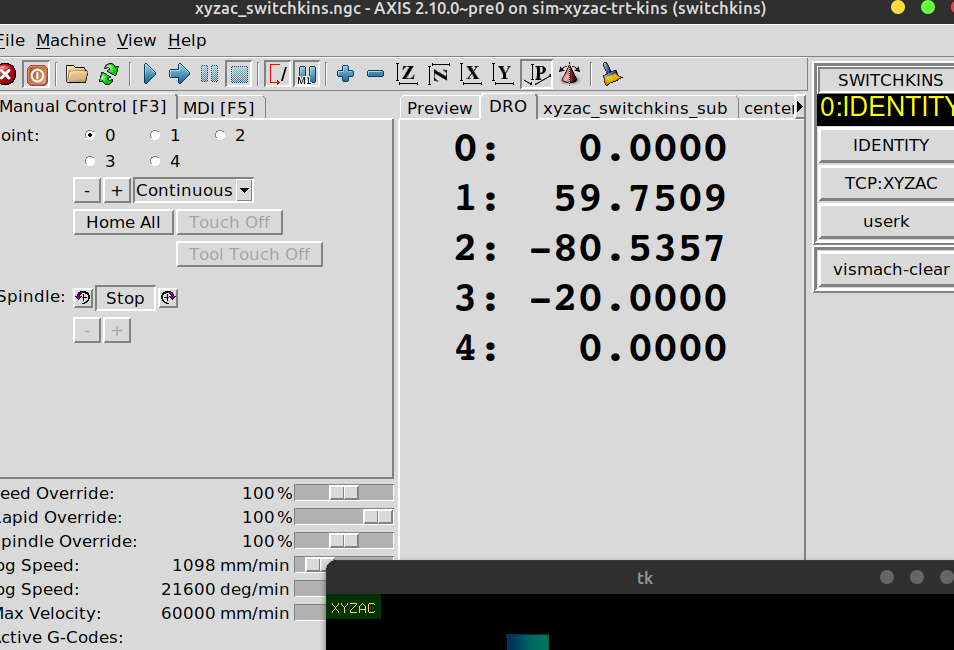
Here are screenshots of joint positions in my DRO with z-rot-offset = -215 :
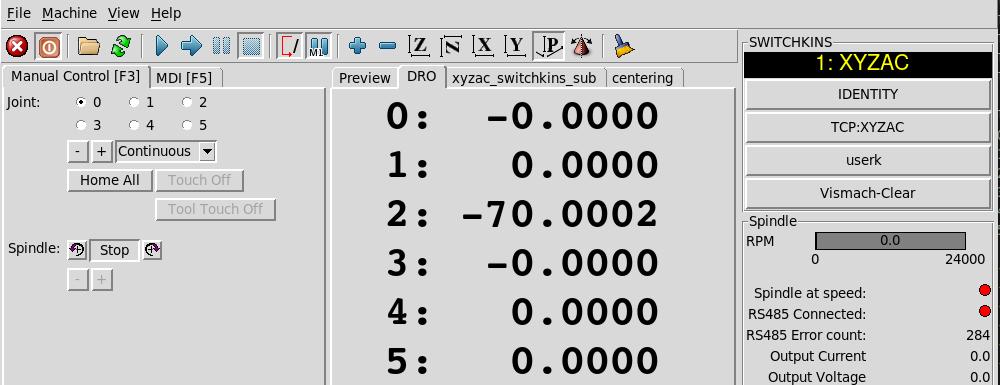
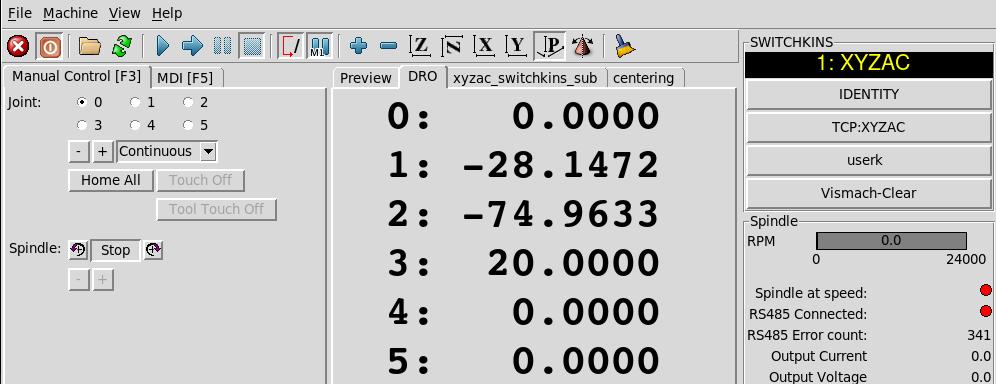
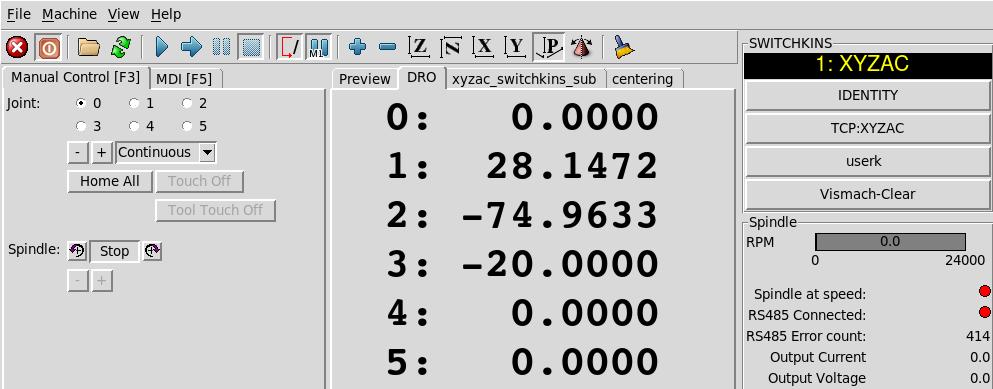
Here are screenshots of joint positions in my DRO with z-rot-offset = +215 :
Here are screenshots of joint positions in my DRO with z-rot-offset = -215 :
Here are screenshots of joint positions in my DRO with z-rot-offset = +215 :
Attachments:
Last edit: 09 Feb 2023 07:51 by akg1904.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4724
- Thank you received: 2117
09 Feb 2023 10:40 - 09 Feb 2023 12:06 #264124
by Aciera
Replied by Aciera on topic TCP 5-axis kinematics
I don't know, for the moment I have run out of ideas. Maybe my sim config for your setup (as I understand it) can help you figure out why your config behaves the way it does:
[edit]
The basic question is why does your config come up with different kinematic results given the same input values (ie same joint position in the gui and the same offset values in the ini file).
What I suggest is that you run my sim config and see if it behaves correctly. If it does not give the results I showed then there is something wrong with the xyzac-trt kinematic file in your installation. If you do get the same results with the sim as I posted then there is something off in your machine config.
[edit]
The basic question is why does your config come up with different kinematic results given the same input values (ie same joint position in the gui and the same offset values in the ini file).
What I suggest is that you run my sim config and see if it behaves correctly. If it does not give the results I showed then there is something wrong with the xyzac-trt kinematic file in your installation. If you do get the same results with the sim as I posted then there is something off in your machine config.
Attachments:
Last edit: 09 Feb 2023 12:06 by Aciera.
The following user(s) said Thank You: akg1904
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-

Less
More
- Posts: 226
- Thank you received: 14
26 Feb 2023 09:21 #265394
by JackRay
Replied by JackRay on topic TCP 5-axis kinematics
Hello to all,
I have just made a machine type XYZBC table with the B axis parallel to the Y axis . my TCP is defined like this :
HALCMD = sets :z-offset 40.430 ( Pivot point B axis)
HALCMD = setp xyzbc-trt-kins.x-rot-point 398.954
( value since the "X G53" axis )
HALCMD = setp xyzbc-trt-kins.y-rot-point 92.470
( value from the "Y G53" axis )
HALCMD = setp xyzbc-trt-kins.z-rot-point -268.73
( value from the "X G53" axis -40.430 )
Z origin (G53) contact with the center of my C axis -228.3mm
my kinematics function very in TCP (M428) in manual
- Problem 1:
- I do not understand why it is necessary for me to add to the -228.3mm the -40.430mm (value of the top you plate of the axis C to my center Pivot) whereas I declare it here:
HALCMD = sets :z-offset 40.430 ( Pivot point B axis).
if I don't make this addition the TCP movement is incorrect ( the spindle doesn't follow the moving point of the B axis.
- Problem 2:
when I post process my program the positions are not respected compared to the simulation. I don't know if this is due to the machine configuration or to my post processor.
In the image below, which simply shows the use of a chamfer around a rectangular part, we can see that the axis inclination is along the X axis (which cannot make a chamfer).
My question if someone can help me :
if my TCP is respected in manual mode ( the axes perfectly synchronized ) but that my TCP is not respected in program mode, it is only due to my machine configuration or to my post processor , or both ?
I'm at the bottom of the hole because I made this machine and I can't find the right configuration. However I had the same machine in XYZAC which worked very well...
Thank you for your help if possible
I have just made a machine type XYZBC table with the B axis parallel to the Y axis . my TCP is defined like this :
HALCMD = sets :z-offset 40.430 ( Pivot point B axis)
HALCMD = setp xyzbc-trt-kins.x-rot-point 398.954
( value since the "X G53" axis )
HALCMD = setp xyzbc-trt-kins.y-rot-point 92.470
( value from the "Y G53" axis )
HALCMD = setp xyzbc-trt-kins.z-rot-point -268.73
( value from the "X G53" axis -40.430 )
Z origin (G53) contact with the center of my C axis -228.3mm
my kinematics function very in TCP (M428) in manual
- Problem 1:
- I do not understand why it is necessary for me to add to the -228.3mm the -40.430mm (value of the top you plate of the axis C to my center Pivot) whereas I declare it here:
HALCMD = sets :z-offset 40.430 ( Pivot point B axis).
if I don't make this addition the TCP movement is incorrect ( the spindle doesn't follow the moving point of the B axis.
- Problem 2:
when I post process my program the positions are not respected compared to the simulation. I don't know if this is due to the machine configuration or to my post processor.
In the image below, which simply shows the use of a chamfer around a rectangular part, we can see that the axis inclination is along the X axis (which cannot make a chamfer).
My question if someone can help me :
if my TCP is respected in manual mode ( the axes perfectly synchronized ) but that my TCP is not respected in program mode, it is only due to my machine configuration or to my post processor , or both ?
I'm at the bottom of the hole because I made this machine and I can't find the right configuration. However I had the same machine in XYZAC which worked very well...
Thank you for your help if possible
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4724
- Thank you received: 2117
26 Feb 2023 11:04 #265406
by Aciera
Replied by Aciera on topic TCP 5-axis kinematics
Problem 1:
This is because the kinematic model was constructed like that. In the trt kinematics the (x,y,z)-rot-point values describe the offset between the machine reference and the rotation point of the rotary assembly and the (x,z)-offset the distance between the rotation-point and the face center of the c-rotary.
Problem 2:
If your TCP configuration works in manual mode but not with the code output of your post processor then I would say the post processor is the likely cause of the problem.
Are you sure the post processor is correctly configured to output code for a XYZBC?
In your screen shot it seems that the post processor is simply replacing an A axis word with a B axis word for a chamfer along the X axis. Instead it would also need to do a C rotation of 90° to align the chamfer with the Y axis first.
This is because the kinematic model was constructed like that. In the trt kinematics the (x,y,z)-rot-point values describe the offset between the machine reference and the rotation point of the rotary assembly and the (x,z)-offset the distance between the rotation-point and the face center of the c-rotary.
Problem 2:
If your TCP configuration works in manual mode but not with the code output of your post processor then I would say the post processor is the likely cause of the problem.
Are you sure the post processor is correctly configured to output code for a XYZBC?
In your screen shot it seems that the post processor is simply replacing an A axis word with a B axis word for a chamfer along the X axis. Instead it would also need to do a C rotation of 90° to align the chamfer with the Y axis first.
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
Less
More
- Posts: 226
- Thank you received: 14
26 Feb 2023 19:13 #265432
by JackRay
Replied by JackRay on topic TCP 5-axis kinematics
Yes indeed, I only changed the letters in my post processor "Fusion 360". I do not know how to set it otherwise.
Here is what I changed in my post processor:
if (true) { // note: setup your machine here
var bAxis = createAxis({coordinate:1, table:true, axis:[0, 1, 0], cyclic:true, range:[-95, 95], offset:[0,0,0], preference:0});
var cAxis = createAxis({coordinate:2, table:true, axis:[0, 0, 1], cyclic:true, range:[-720, 720], offset:[0,0,0], preference:0});
machineConfiguration = new MachineConfiguration(bAxis, cAxis);
setMachineConfiguration(machineConfiguration);
optimizeMachineAngles2(0); // TCP mode
I don't know if you know this type of post processor but just in case ?
Thanks
Here is what I changed in my post processor:
if (true) { // note: setup your machine here
var bAxis = createAxis({coordinate:1, table:true, axis:[0, 1, 0], cyclic:true, range:[-95, 95], offset:[0,0,0], preference:0});
var cAxis = createAxis({coordinate:2, table:true, axis:[0, 0, 1], cyclic:true, range:[-720, 720], offset:[0,0,0], preference:0});
machineConfiguration = new MachineConfiguration(bAxis, cAxis);
setMachineConfiguration(machineConfiguration);
optimizeMachineAngles2(0); // TCP mode
I don't know if you know this type of post processor but just in case ?
Thanks
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
Less
More
- Posts: 226
- Thank you received: 14
28 Feb 2023 17:29 #265580
by JackRay
Replied by JackRay on topic TCP 5-axis kinematics
Hello,
Does anyone have an idea about my previous post?
Thanks
Does anyone have an idea about my previous post?
Thanks
Please Log in or Create an account to join the conversation.
Time to create page: 0.293 seconds