Remora - ethernet NVEM / EC300 / EC500 cnc board
- JAMSys
- Offline
- New Member
-

Less
More
- Posts: 11
- Thank you received: 0
29 Jul 2023 08:15 #276516
by JAMSys
Replied by JAMSys on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Yes, you are right.
To remove the wrong config file, I had to full erase the chip.
With pyocd, this is very easy.
After flashing the firmware again, the board works OK.
Thanks for your support, Scotta!
To remove the wrong config file, I had to full erase the chip.
With pyocd, this is very easy.
After flashing the firmware again, the board works OK.
Thanks for your support, Scotta!
Please Log in or Create an account to join the conversation.
- raf1110
-
- Offline
- Senior Member
-

Less
More
- Posts: 46
- Thank you received: 5
29 Jul 2023 11:30 - 29 Jul 2023 11:31 #276520
by raf1110
Replied by raf1110 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Got to this point but not sure where to find problems from this log. There is missing file remora-nv.so
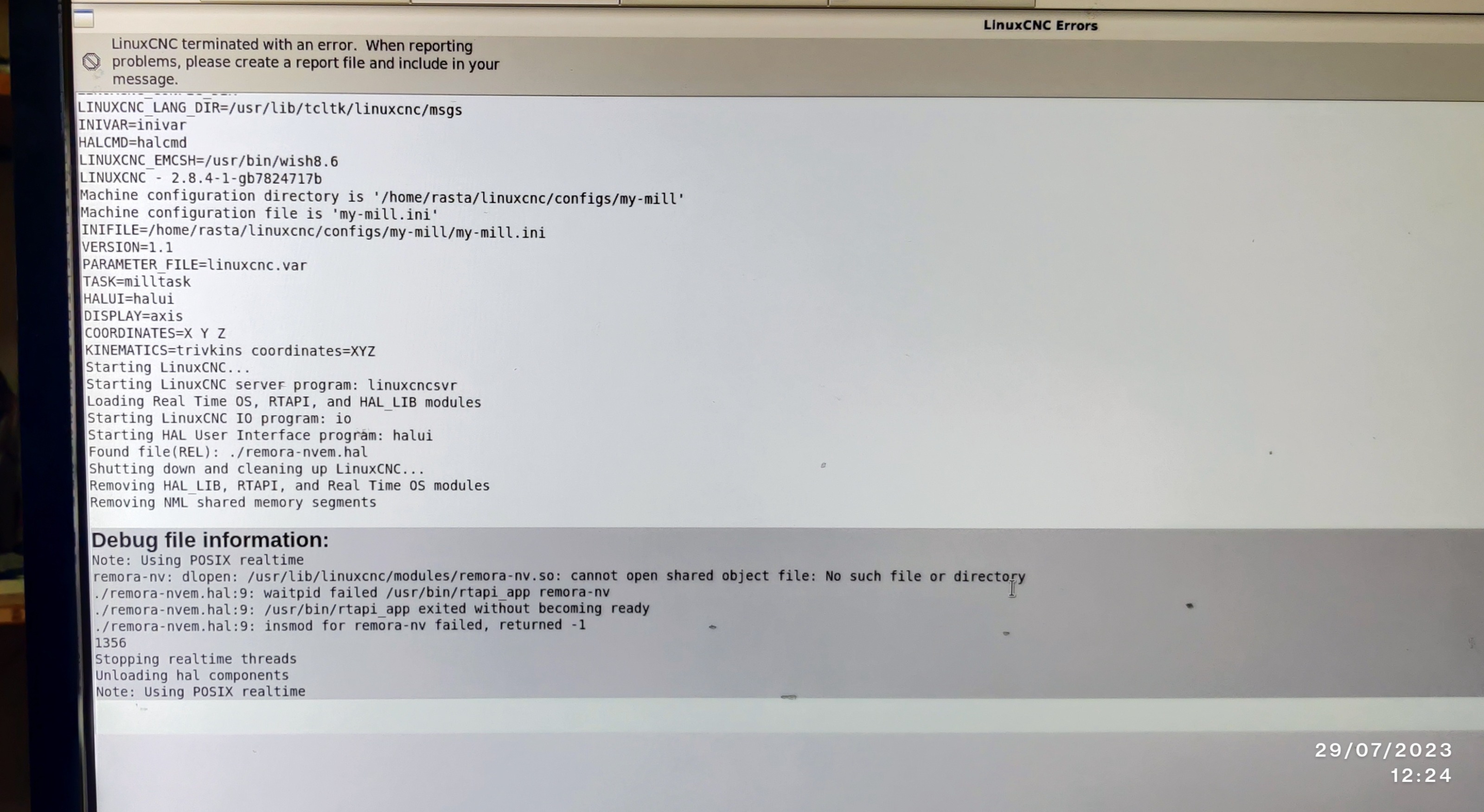
Attachments:
Last edit: 29 Jul 2023 11:31 by raf1110.
Please Log in or Create an account to join the conversation.
- cakeslob
- Offline
- Platinum Member
-

Less
More
- Posts: 926
- Thank you received: 278
29 Jul 2023 18:08 #276533
by cakeslob
Replied by cakeslob on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
i think you probably need to install the linuxcnc component
github.com/scottalford75/Remora-NVEM/tre...Components/Remora-nv
remora-docs.readthedocs.io/en/latest/sof...mp-installation.html
github.com/scottalford75/Remora-NVEM/tre...Components/Remora-nv
sudo halcompile --install remora-nv.cremora-docs.readthedocs.io/en/latest/sof...mp-installation.html
The following user(s) said Thank You: raf1110
Please Log in or Create an account to join the conversation.
- scotta
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 959
- Thank you received: 489
29 Jul 2023 21:29 #276537
by scotta
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Do you have both python2 and python3 installed on the system? Might have to useSorry if I am asking another dumb question here but...
I have flashed an EC500 pwba with Remora-RT1052-cpp-main (as opposed to Remora-RT1052)
I can ping the board & take it out of Estop, but when I try to upload a config file with...
python3 upload_config.py ec500-rt1052.txt
It says no tftpy module found.
Here is the full text of the install & error....
(Sat Jul-29)-(40K in 5 files)-(alex:~/01_install/Remora-RT1052-cpp-main/LinuxCNC)
(12:10:32pm)> pip install tftpy
Collecting tftpy
Downloading files.pythonhosted.org/packages/c1/8f/43...4/tftpy-0.8.2.tar.gz
Building wheels for collected packages: tftpy
Running setup.py bdist_wheel for tftpy ... done
Stored in directory: /home/alex/.cache/pip/wheels/7e/76/31/0b8b0c463d90688eb47f9326beaaf1232aa9f009a8d1843d99
Successfully built tftpy
Installing collected packages: tftpy
Successfully installed tftpy-0.8.2
(Sat Jul-29)-(40K in 5 files)-(alex:~/01_install/Remora-RT1052-cpp-main/LinuxCNC)
(12:11:04pm)> python3 upload_config.py ec500-rt1052.txt
Traceback (most recent call last):
File "upload_config.py", line 7, in <module>
import tftpy
ModuleNotFoundError: No module named 'tftpy'
Thanks in advance.
pip3 install tftpyPlease Log in or Create an account to join the conversation.
- frayja2002
- Offline
- Premium Member
-

Less
More
- Posts: 159
- Thank you received: 13
29 Jul 2023 21:51 #276538
by frayja2002
Replied by frayja2002 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Hi there
I have done
sudo apt install python3-pip
But am still getting ...
(7:46:16am)> python3 upload_config.py ec500-rt1052.txt
Traceback (most recent call last):
File "upload_config.py", line 7, in <module>
import tftpy
ModuleNotFoundError: No module named 'tftpy'
I have tried using python2 but get the following ....
(7:40:12am)> python2 upload_config.py ec500-rt1052.txt
Valid JSON config file, uploading to board
('Config file length (words) =', 1715.0)
('Config file length (bytes) =', 6862)
('Remainder =', 2)
('Padding added = ', [0, 0])
('Config file length with padding (bytes) =', 6868)
('CRC-32 =', '0x3149e81e')
Traceback (most recent call last):
File "upload_config.py", line 58, in <module>
metadata[4] = length & 0xff
TypeError: unsupported operand type(s) for &: 'float' and 'int'
I also tried running it as sudo as I thought there might be a permissions problem.
Unfortunately I'm not having much luck.
Thanks.
I have done
sudo apt install python3-pip
But am still getting ...
(7:46:16am)> python3 upload_config.py ec500-rt1052.txt
Traceback (most recent call last):
File "upload_config.py", line 7, in <module>
import tftpy
ModuleNotFoundError: No module named 'tftpy'
I have tried using python2 but get the following ....
(7:40:12am)> python2 upload_config.py ec500-rt1052.txt
Valid JSON config file, uploading to board
('Config file length (words) =', 1715.0)
('Config file length (bytes) =', 6862)
('Remainder =', 2)
('Padding added = ', [0, 0])
('Config file length with padding (bytes) =', 6868)
('CRC-32 =', '0x3149e81e')
Traceback (most recent call last):
File "upload_config.py", line 58, in <module>
metadata[4] = length & 0xff
TypeError: unsupported operand type(s) for &: 'float' and 'int'
I also tried running it as sudo as I thought there might be a permissions problem.
Unfortunately I'm not having much luck.
Thanks.
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 959
- Thank you received: 489
29 Jul 2023 21:59 #276540
by scotta
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
I'd say it's a python version issues. Maybe check out this for some tips
Please Log in or Create an account to join the conversation.
- frayja2002
- Offline
- Premium Member
-
Less
More
- Posts: 159
- Thank you received: 13
29 Jul 2023 22:38 #276541
by frayja2002
Replied by frayja2002 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Thanks Scott. I worked it out.
Installing from the package manager does not work.
I was originally using pip install however it must be pip3 install for it to work.
I have seen in the previous page that there has been some discussion about documenting remora.
I would like to be able to add my experiences to any documentation effort if you are interested, although I have not done anything like this before.
Looking through the web docs I think the DigitalDream stuff is different enough to need its own docs.
I have just spent the last 2 days looking through the 100 odd pages of this thread & think it would be good to put the info in a more searchable form.
Let me know your thoughts.
Alex
Installing from the package manager does not work.
I was originally using pip install however it must be pip3 install for it to work.
I have seen in the previous page that there has been some discussion about documenting remora.
I would like to be able to add my experiences to any documentation effort if you are interested, although I have not done anything like this before.
Looking through the web docs I think the DigitalDream stuff is different enough to need its own docs.
I have just spent the last 2 days looking through the 100 odd pages of this thread & think it would be good to put the info in a more searchable form.
Let me know your thoughts.
Alex
Please Log in or Create an account to join the conversation.
- frayja2002
- Offline
- Premium Member
-
Less
More
- Posts: 159
- Thank you received: 13
30 Jul 2023 04:20 - 30 Jul 2023 04:50 #276547
by frayja2002
Replied by frayja2002 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Hi Scott.
I have managed to upload the config file to the newly flashed EC500 board & am starting to play with it.
Looking at the hal show all (most) of the inputs seem to be inverted. Assuming this may just be a quirk I have gone into th econfig file & tried to invert some of the pins & this seem to have no effect.
{
"Thread": "Servo",
"Type": "Digital Pin",
"Comment": "IN01",
"Pin": "P3_25",
"Mode": "Input",
"Data Bit": 4,
"Invert": "true"
},
I believe the upload is working as I get no errors....
(2:01:52pm)> python3 upload_config.py ec500-rt1052.txt
Valid JSON config file, uploading to board
Config file length (words) = 1716
Config file length (bytes) = 6861
Remainder = 1
Padding added = [0, 0, 0]
Config file length with padding (bytes) = 6864
CRC-32 = 0xbf67a0b8
And if I go through & toggle the inputs the red light on the board comes on & the yellow light in hal show turns red (deactivates)
Two questions
Should they be high by default.
Why does changing false to true in the config file have no effect.
Thanks
I have managed to upload the config file to the newly flashed EC500 board & am starting to play with it.
Looking at the hal show all (most) of the inputs seem to be inverted. Assuming this may just be a quirk I have gone into th econfig file & tried to invert some of the pins & this seem to have no effect.
{
"Thread": "Servo",
"Type": "Digital Pin",
"Comment": "IN01",
"Pin": "P3_25",
"Mode": "Input",
"Data Bit": 4,
"Invert": "true"
},
I believe the upload is working as I get no errors....
(2:01:52pm)> python3 upload_config.py ec500-rt1052.txt
Valid JSON config file, uploading to board
Config file length (words) = 1716
Config file length (bytes) = 6861
Remainder = 1
Padding added = [0, 0, 0]
Config file length with padding (bytes) = 6864
CRC-32 = 0xbf67a0b8
And if I go through & toggle the inputs the red light on the board comes on & the yellow light in hal show turns red (deactivates)
Two questions
Should they be high by default.
Why does changing false to true in the config file have no effect.
Thanks
Last edit: 30 Jul 2023 04:50 by frayja2002.
Please Log in or Create an account to join the conversation.
- raf1110
-
- Offline
- Senior Member
-
Less
More
- Posts: 46
- Thank you received: 5
30 Jul 2023 11:33 #276560
by raf1110
Replied by raf1110 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
This action actually got me rs232 to running state on serial monitor I assume now I need to connect to machine.
There is one thing that is latency warning.
There is one thing that is latency warning.
Please Log in or Create an account to join the conversation.
- cncmiljc
- Offline
- Junior Member
-

Less
More
- Posts: 31
- Thank you received: 0
30 Jul 2023 13:47 #276571
by cncmiljc
Replied by cncmiljc on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
I would like to know the following, using the firmware for the "nvem" everything works perfectly, but I changed the processor, f207 to f407, I also changed the numbers of the timers " baseThread = new pruThread(TIM9, TIM1_BRK_TIM9_IRQn, base_freq);
//NVIC_SetVector(TIM1_BRK_TIM9_IRQn, (uint32_t)TIM9_IRQHandler);
NVIC_SetPriority(TIM1_BRK_TIM9_IRQn, 2);
servoThread = new pruThread(TIM10, TIM1_UP_TIM10_IRQn, servo_freq);
//NVIC_SetVector(TIM1_UP_TIM10_IRQn, (uint32_t)TIM10_IRQHandler);
NVIC_SetPriority(TIM1_UP_TIM10_IRQn, 3);
I did all the reconfiguration in the "timer.cpp" folder and also the clock reconfiguration, however the following is happening, when I use the firmware of the "nvem" itself with the reconfiguration, everything works perfectly, however when trying to do everything from scratch, that is create a new configuration, nothing works, do you need some version of " "Stm Cube IDE" to do that? I want to make a new configuration, that is to start so as not to use the firmware of the "nvem" itself, at the moment I am using this version "STM32CubeIDE
Version: 1.12.0.
//NVIC_SetVector(TIM1_BRK_TIM9_IRQn, (uint32_t)TIM9_IRQHandler);
NVIC_SetPriority(TIM1_BRK_TIM9_IRQn, 2);
servoThread = new pruThread(TIM10, TIM1_UP_TIM10_IRQn, servo_freq);
//NVIC_SetVector(TIM1_UP_TIM10_IRQn, (uint32_t)TIM10_IRQHandler);
NVIC_SetPriority(TIM1_UP_TIM10_IRQn, 3);
I did all the reconfiguration in the "timer.cpp" folder and also the clock reconfiguration, however the following is happening, when I use the firmware of the "nvem" itself with the reconfiguration, everything works perfectly, however when trying to do everything from scratch, that is create a new configuration, nothing works, do you need some version of " "Stm Cube IDE" to do that? I want to make a new configuration, that is to start so as not to use the firmware of the "nvem" itself, at the moment I am using this version "STM32CubeIDE
Version: 1.12.0.
Please Log in or Create an account to join the conversation.
Time to create page: 2.858 seconds