Schaublin 125-CNC retrofit.
- db1981
- Offline
- Platinum Member
-

- Posts: 790
- Thank you received: 276
Although adapting an SOES (simple open ethercat slave) with implemented CoE Interface would not be an big task...
Please Log in or Create an account to join the conversation.
- arvidb
-

- Offline
- Platinum Member
-
- Posts: 459
- Thank you received: 158
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
- Posts: 790
- Thank you received: 276
@arvidb:
yes and no.....
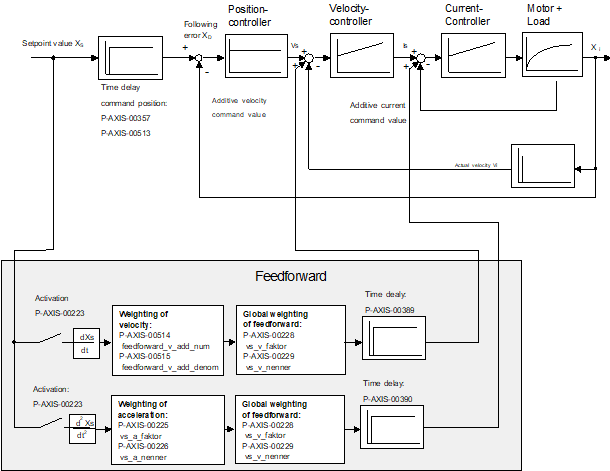
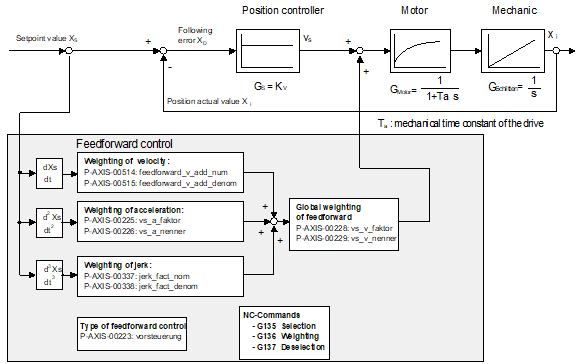
advanced feed-forward control is mostly used in Robotics and HSM Applications. Accleration feed forward is used to minimize the following error which arises through the time constants in our system. the difference between setpoint generation and mechanical reaction. Torque feed forward is an advanced usage to get dynamic and jerk controlled.
But these values are no fix factors, they are dynamically calculated in the task, on systems with high bandwith the biggest problem is to get an accurate velocity feedback.
In upper class industrial controls with 7 phase S-curve jerk controll etc. the trajectory planer, kinematic moduls and axis setpoint generators are merged as one part and acc-ff comes out of the tp because he knows at which time the next big step in velocity change follows. the torque ff mostly is calculated from the kinematics module in conjunction with the tp to do jerk limiting. but all this is done with some kind of look ahead....
to explain this more exactly, i would have to reset my brain to the state of 20 years ago. Today i look on an axis plot and my belly tells me which srew i have to turn....
I have not done this with linuxcnc yet. On the systems i have the need for this, we actually use another system because an s-curve profile and advanced tcp control is needed. (large gantrys 4 meters x 5-xxx meters)
I don't think that torque ff with linuxcnc and its actually tp makes sence. Output the velocity feedforward to the drive could be an big advantage to get rid of ferror in accel and deccel phase on axis with an big stick slip effect. Need to take a look in the pid, perhaps the pins for that exists already, then only the right scalling is neccesary.
Attachments:
Please Log in or Create an account to join the conversation.
- arvidb
-
- Offline
- Platinum Member
-
- Posts: 459
- Thank you received: 158
The reason I asked is I saw velocity and torque offsets in the EtherCAT drive profile, and I know that, at least with a 7 phase jerk-limited planner, you get instantaneous velocity and acceleration in addition to position, and it seems obvious to feed-forward at least the velocity to the drive then.
I also saw in the documentation that there are pins joint.N.joint−acc−cmd and joint.N.joint−vel−cmd in addition to the joint.N.motor−pos−cmd, and was wondering if they see any use. They are marked "DEBUG", i.e. "subject to removal at any time".
Please Log in or Create an account to join the conversation.
- RotarySMP
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-
- Posts: 1627
- Thank you received: 595
Mark
Please Log in or Create an account to join the conversation.
- J Green
- Offline
- Elite Member
-

- Posts: 164
- Thank you received: 24
"stmbl is an opensource servo drive"
Do you know if the Stmbl servo drive design has overcome that one IC being not available anymore ? Or if there is continuing effort in the Stmbl servo drive ? Hope there is as I thought it was a very useful - configurable servo drive .
Please Log in or Create an account to join the conversation.
- RotarySMP
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 1627
- Thank you received: 595
I will do a control panel up on the stalk like Schaublin did it. The PC will be housed there. So it will be Cat 6 down to the electrical cabinet to a 7i9x
I have two of Peter's (Talla83) RS422 - SS adapter cards made. These will take to place of a 7i74 next to the 7i9x.
I will need more than 6 Outputs, so I will need a 7i84. I'll also use a 7i73 back up in the user control panel.
I also have some of Peters PCB's to make up two TsHw boards, which I can use as Encoder interface boards with Cat 6 back to the SS adapter cards.
The bit I am stuck on is which 7i9x to get? I am pretty sure it will be an analog servo system, so a 7i97 would work, but that is the biggest and most expensive card, which seems like overkill for two Servos and 3 encoders.
The 7i98 or 7i94 would be cool, but I don't see a DB25 daughter card which supports servos. The 7i33 needs a 50pin FPGA Card right?
I guess I could do 7i93 / 7i33TA and then run all the SS stuff though the extr 50 expansion slot right?
Mark
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
- Posts: 790
- Thank you received: 276
Do you know if the Stmbl servo drive design has overcome that one IC being not available anymore ? Or if there is continuing effort in the Stmbl servo drive ? Hope there is as I thought it was a very useful - configurable servo drive .
I don't know details from this project, but there is actually work progress....
github.com/rene-dev/stmbl
Please Log in or Create an account to join the conversation.
- J Green
- Offline
- Elite Member
-
- Posts: 164
- Thank you received: 24
Thank You ----for the update about your Schaublin lathe , you have been busy .
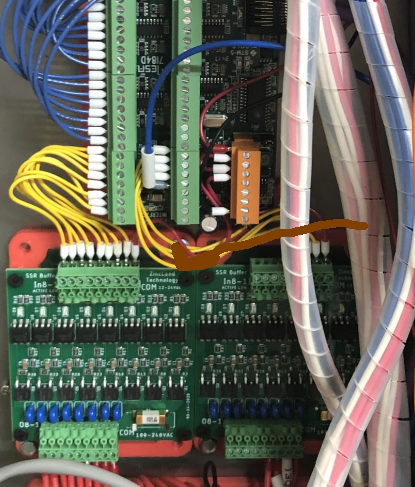
Relays - pneumatic valves - contactors for motors
Wonder if ZincBoy ( Retrofit of a Hitachi-Seike VK45 mill ) would provide details of his solid-state relay Bd.?
Would a 7i77D or 7i83 be worth considering ? Trying to attach a YouTube thing about lost foam casting that shows a cheap vacuum accessory .
Bob
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

- Posts: 17954
- Thank you received: 5261
Probably the best would be a 7I94+ 7I77 combination
Please Log in or Create an account to join the conversation.