ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
- wuyatom
- Offline
- Senior Member
-

Less
More
- Posts: 42
- Thank you received: 0
09 Dec 2022 15:49 - 09 Dec 2022 15:51 #259008
by wuyatom
Replied by wuyatom on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
run code
The coordinates will still shift in the pause state, which will cause the servo motor to rotate at a slow speed and will not stop
The coordinates will still shift in the pause state, which will cause the servo motor to rotate at a slow speed and will not stop
Last edit: 09 Dec 2022 15:51 by wuyatom.
Please Log in or Create an account to join the conversation.
- TOLP2
- Offline
- Elite Member
-

Less
More
- Posts: 225
- Thank you received: 178
15 Dec 2022 14:44 #259558
by TOLP2
Replied by TOLP2 on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Finally managed to build some of the LitexCNC firmware. I've tried many combinations of Litex, Yosys and Nextpnr-ecp to find out why the synthesis was so slow. I have found a parameter which is a good prediction whether it will build or not: TRELLIS_COMB. I don't know what this parameter exactly is, my first guess was the combinatorial part of the design, but I'm not sure.
When using a lot data-fields this parameter could reach up to 75% or even more, which makes placement really ahrd for Nextpnr and thus long or impossible build times and timing constraints not met. Keep this at 60% and the build is a breeze. I found that this parameter is heavily affected by the number of parameters in the MMIO register.
As every stepgen used at least 7 parameters, this was too heavy. The parameters were:
However, this means parts of the proposed functionality (S-curve acceleration within each cycle) has gone lost. But I think I've found the maximum of the card in combination with open-source toolchain. Another good thing is that this change will also simplify the HAL...
Before I go to push this change to the repo, I've to modify the driver to re-align the data.
When using a lot data-fields this parameter could reach up to 75% or even more, which makes placement really ahrd for Nextpnr and thus long or impossible build times and timing constraints not met. Keep this at 60% and the build is a breeze. I found that this parameter is heavily affected by the number of parameters in the MMIO register.
As every stepgen used at least 7 parameters, this was too heavy. The parameters were:
- pos-fb;
- speed-fb;
- speed-target1;
- speed-target2;
- acceleration1;
- acceleration2;
- apply-time2
- pos-fb;
- speed-fb;
- speed-target;
- acceleration.
However, this means parts of the proposed functionality (S-curve acceleration within each cycle) has gone lost. But I think I've found the maximum of the card in combination with open-source toolchain. Another good thing is that this change will also simplify the HAL...
Before I go to push this change to the repo, I've to modify the driver to re-align the data.
The following user(s) said Thank You: Pro_El
Please Log in or Create an account to join the conversation.
- muvideo
- Offline
- Senior Member
-
Less
More
- Posts: 62
- Thank you received: 30
16 Dec 2022 11:26 #259628
by muvideo
Replied by muvideo on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Hello, in my last commits there are two small updates to make easier the firmware generation and management:
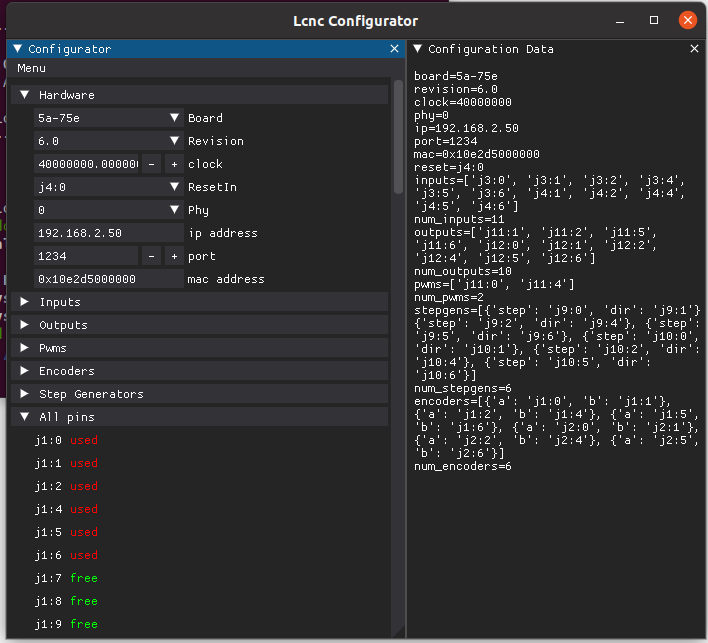
- ini files for storing and retrieving the configuration: perupherals, pinout, harware details
- GUI configurator utility, I was tired of editing endless lists of pins, this will make easier the board configuration (you'll need dearpygui library in python for this)
- Lcnc on github
Attachments:
The following user(s) said Thank You: tommylight, TOLP2
Please Log in or Create an account to join the conversation.
- TOLP2
- Offline
- Elite Member
-
Less
More
- Posts: 225
- Thank you received: 178
17 Dec 2022 08:41 - 18 Dec 2022 21:47 #259719
by TOLP2
Replied by TOLP2 on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Really nice work! This is still on my 'most wanted' list. At the moment I use VsCode for this task. I aligned all the rows with data, so I can easily change 6 lines up a time with a shortcut. But better method is most welcome.
Status-update from Litex-CNC:
I just committed all required changes for reducing the size of the data package. If anyone wants to try this:
Another change I've made in the stepgen is the timing constraint. When there is some jitter on the thread period this error might get triggered, nothing to worry about. However, sometimes the error would get 'stuck'. Stuck means that is the timing is below the minimum it is set to this minimum. However, this value will be used in the next cycle as a starting point. This means that as soon the warning occurs, it will most likely keep on recurring. To prevent this, I don't set the apply time equal to the boundary, but provide some slack or space.
I've checked that the apply time is not slowly decreasing or increasing, which is definitely not the case.
Status-update from Litex-CNC:
- re-wrote the firmware so it compiles within minutes;
- error checking the driver for the changes required for the re-write above. At this moment GPIO and PWM is working. Enabling stepgen leads to a core dump, so most likely a memory issue there.
- could reproduce the large amount of 'Apply time exceeding timings'. Will put on a log on this error and plot the progress of the timings during usage.
- the BOB are in! I've now BOB's for:
- GPIO in: confirmed working,
- GPIO out: second version, should work. First version had a P-channel FET mirrored as I mixed it up with an N-channel. Now confirmed working, able to switch 100 mA per channel (12 Volt), less at 24 Volt.
- stepgen (partly built, received missing parts (XOR-gate for hardware inversion of ENA and ALARM)
- fast encoder (to be built, still missing 6N137 to be delivered).
I just committed all required changes for reducing the size of the data package. If anyone wants to try this:
- requires rebuilding the firmware
- requires rebuilding the driver
- some minor changes are required for the HAL file regarding the stepgen, which has become simpler. Please see code example below.
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt litexcnc
loadrt litexcnc_eth config_file="[LITEXCNC]CONFIG_FILE"
loadrt pos2vel number=1
# Add the functions to the thread
addf [LITEXCNC](NAME).read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pos2vel.convert servo-thread
addf [LITEXCNC](NAME).write servo-thread
[...]
########################################################################
STEPGEN
########################################################################
# - timings (prevent re-calculation)
net pos2vel.period-s <= [LITEXCNC](NAME).stepgen.period-s
net pos2vel.period-s-recip <= [LITEXCNC](NAME).stepgen.period-s-recip
STEPGEN - X-AXIS
########################################################################
# POS2VEL
# - position control
net xpos-fb <= [LITEXCNC](NAME).stepgen.00.position_prediction
net xpos-fb => joint.0.motor-pos-fb
net xpos-fb => pos2vel.0.position-feedback
net xvel-fb pos2vel.0.velocity-feedback <= [LITEXCNC](NAME).stepgen.00.velocity-prediction
net xpos-cmd pos2vel.0.position-cmd <= joint.0.motor-pos-cmd
# - settings
setp pos2vel.0.max-acceleration [JOINT_2]STEPGEN_MAXACCEL
# setp pos2vel.0.debug 1
# STEPGEN
# - Setup of timings
setp [LITEXCNC](NAME).stepgen.00.position-scale [JOINT_2]SCALE
setp [LITEXCNC](NAME).stepgen.00.steplen 5000
setp [LITEXCNC](NAME).stepgen.00.stepspace 5000
setp [LITEXCNC](NAME).stepgen.00.dir-hold-time 10000
setp [LITEXCNC](NAME).stepgen.00.dir-setup-time 10000
setp [LITEXCNC](NAME).stepgen.00.max-velocity [JOINT_2]MAX_VELOCITY
setp [LITEXCNC](NAME).stepgen.00.max-acceleration [JOINT_2]STEPGEN_MAXACCEL
# setp [LITEXCNC](NAME).stepgen.00.debug 1
# - Connect velocity command
net pos2vel.0.velocity-cmd => [LITEXCNC](NAME).stepgen.00.velocity-cmd
# - Set the acceleration to be used (NOTE: pos2vel has fixed acceleration)
setp [LITEXCNC](NAME).stepgen.00.acceleration-cmd [JOINT_2]STEPGEN_MAXACCEL
# - enable the drive
net xenable joint.0.amp-enable-out => [LITEXCNC](NAME).stepgen.00.enable
########################################################################
[...]Another change I've made in the stepgen is the timing constraint. When there is some jitter on the thread period this error might get triggered, nothing to worry about. However, sometimes the error would get 'stuck'. Stuck means that is the timing is below the minimum it is set to this minimum. However, this value will be used in the next cycle as a starting point. This means that as soon the warning occurs, it will most likely keep on recurring. To prevent this, I don't set the apply time equal to the boundary, but provide some slack or space.
I've checked that the apply time is not slowly decreasing or increasing, which is definitely not the case.
Last edit: 18 Dec 2022 21:47 by TOLP2. Reason: GPIO out BOB working
Please Log in or Create an account to join the conversation.
- TOLP2
- Offline
- Elite Member
-
Less
More
- Posts: 225
- Thank you received: 178
19 Dec 2022 09:34 #259879
by TOLP2
Replied by TOLP2 on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Just released another version of LitexCNC to PyPi.org. To try it out:
After this your set to build your firmware. See for full documentation (including the changes to the driver): litex-cnc.readthedocs.io/en/latest/index.html
pip install --extra-index-url https://test.pypi.org/simple/ litexcnc
# After installation
python3 litexcnc build_driver
python3 litexcnc install_litex
python3 litexcnc install_toolchainAfter this your set to build your firmware. See for full documentation (including the changes to the driver): litex-cnc.readthedocs.io/en/latest/index.html
Please Log in or Create an account to join the conversation.
- TOLP2
- Offline
- Elite Member
-
Less
More
- Posts: 225
- Thank you received: 178
22 Dec 2022 08:43 #260063
by TOLP2
Replied by TOLP2 on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
I improved the etherbone driver a bit, so the buffers (write/read-read-request) are now part of the FPGA struct. This prevents a whole lot of copying data around in memory. This improved the speed of the driver with roughly 10% when using a 5A-75E with all pins appointed.This should address the issue of the high CPU usage partly.
Tonight I'm going to test the encoder on my system. Is it finally possible to release a full version before Christmas?
Tonight I'm going to test the encoder on my system. Is it finally possible to release a full version before Christmas?
The following user(s) said Thank You: tommylight, Pro_El, wzor
Please Log in or Create an account to join the conversation.
- TOLP2
- Offline
- Elite Member
-
Less
More
- Posts: 225
- Thank you received: 178
24 Dec 2022 21:56 #260264
by TOLP2
Replied by TOLP2 on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Merry Christmas to everybody. I would like to thank everybody for their support in making the firmware and driver last year.
Wish everybody good days and stay safe!
Wish everybody good days and stay safe!
The following user(s) said Thank You: tommylight, Pro_El, muvideo
Please Log in or Create an account to join the conversation.
- TOLP2
- Offline
- Elite Member
-
Less
More
- Posts: 225
- Thank you received: 178
26 Dec 2022 22:59 #260356
by TOLP2
Replied by TOLP2 on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Today I finally merged and deleted the branch 'envoders' in which I was developing the support for encoders. Tested the working for encoders successfully and put everything in main. Some nice facts / features on the encoders:
- In the JSON-config you can set minimum and maximum value for the encoders. This plays really nice for setting feed, rapid and spindle override. You can directly use the output of the encoder counts with gmoccapy or you can use the scaled value to simulate an potentiometer with this function
- In the JSON-config you can set the reset_value. This is the value to which the counts are set on the FPGA when either the FPGA is being reset (for example at start up of LinuxCNC) or when the index enable is set to TRUE and an index pulse happens.
- A breakout board for fast encoders is available. The speed aimed for is 1 MHz.
The following user(s) said Thank You: wzor
Please Log in or Create an account to join the conversation.
- TOLP2
- Offline
- Elite Member
-
Less
More
- Posts: 225
- Thank you received: 178
27 Dec 2022 13:56 - 29 Dec 2022 22:15 #260394
by TOLP2
Replied by TOLP2 on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
My 5a-75e is ff-up. Does any one in Europe, or even better in The Netherlands, have a spare card? It takes so long to get a new one otherwise.
Update:
Just ordered two more cards. Spend more then 8 hours trying to rewire the broken traces and fix the buffers. But I think some more of the board has been damaged, because I cannot get any response from the JTAG. Either something shortened out in the FPGA and had it fried, or something else is terrible wrong which I cannot solve.
The new boards will arrive on 15th of January (if everything goes well), then I'll be back in business.
Update:
Just ordered two more cards. Spend more then 8 hours trying to rewire the broken traces and fix the buffers. But I think some more of the board has been damaged, because I cannot get any response from the JTAG. Either something shortened out in the FPGA and had it fried, or something else is terrible wrong which I cannot solve.
The new boards will arrive on 15th of January (if everything goes well), then I'll be back in business.
Last edit: 29 Dec 2022 22:15 by TOLP2.
Please Log in or Create an account to join the conversation.
- juergenmoser
- Offline
- Junior Member
-

Less
More
- Posts: 26
- Thank you received: 10
30 Dec 2022 07:46 #260540
by juergenmoser
Replied by juergenmoser on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Hello together, i am a beginner at this point. I have one Question - can i use this board (5a75b) also only for stepper motors without encoder feedback?
Kind regards
Kind regards
Please Log in or Create an account to join the conversation.
Moderators: PCW, jmelson
Time to create page: 0.250 seconds