Biesse Rover 346 Retrofit
- Todd Zuercher
-

- Offline
- Platinum Member
-

Less
More
- Posts: 4753
- Thank you received: 1458
07 Feb 2017 18:36 #87482
by Todd Zuercher
Replied by Todd Zuercher on topic Biesse Rover 346 Retrofit
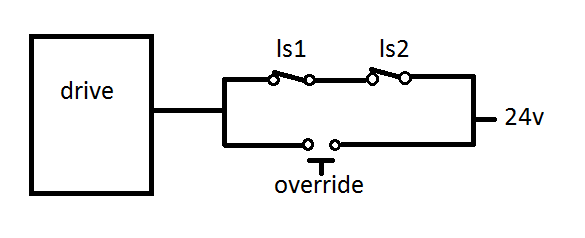
Like this.
Please Log in or Create an account to join the conversation.
- bevins
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
07 Feb 2017 21:11 #87487
by bevins
Replied by bevins on topic Biesse Rover 346 Retrofit
Yes Todd, thanks, thats what I was thinking also however...... the 24 is com.
I just spoke with the prior owner and he said they never had an override button, they just jogged off the axis. He shut power off the machine and the Z dropped on him overnight also everynight.
Bizarre, since if they ever went the wrong way bad things would have happened.
I am contemplating on what to do, but I have another issue I will make another post here in a sec.
I just spoke with the prior owner and he said they never had an override button, they just jogged off the axis. He shut power off the machine and the Z dropped on him overnight also everynight.
Bizarre, since if they ever went the wrong way bad things would have happened.
I am contemplating on what to do, but I have another issue I will make another post here in a sec.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
07 Feb 2017 21:15 #87489
by bevins
Replied by bevins on topic Biesse Rover 346 Retrofit
IF I set the jogging for say 600IPM on the slider in axis to move it closer to the home position, then I home all,
IT goes through and homes all no problem but after the home all, I cannot jog any faster than the default jog. Even if I move the slider.
Is there something I am doing wrong?
IT goes through and homes all no problem but after the home all, I cannot jog any faster than the default jog. Even if I move the slider.
Is there something I am doing wrong?
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
07 Feb 2017 21:41 #87491
by Todd Zuercher
Replied by Todd Zuercher on topic Biesse Rover 346 Retrofit
If it worries you that the machine may be jogged the wrong way when trying to get off the hard limit. It would be worth your time and effort to wire the + and - limits separately on thier own inputs into Linuxcnc. I am pretty sure that Linuxcnc will restrict movement in the direction of the sensed limit and only allow the machine to be jogged away from it.
As to your jogging feed rate question, I don't know. What are your settings in your ini file?
As to your jogging feed rate question, I don't know. What are your settings in your ini file?
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
07 Feb 2017 21:58 #87493
by bevins
I guess I am going to have to wire them in Linuxcnc. Problem is the Z is a bitch to get at. but oh well.
I am not aware that it will change after homing. I cannot find any docs that discuss that point.
This is in the ini file
[DISPLAY]
[DISPLAY]
#DISPLAY = gmoccapy
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_OVERRIDE = 1.000000
MIN_SPINDLE_OVERRIDE = 0.500000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/bob/linuxcnc/nc_files
INCREMENTS = .1in .05in .01in .005in .001in .0005in .0001in
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 1
MAX_LINEAR_VELOCITY = 10.000000
MIN_LINEAR_VELOCITY = 0.016670
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
[JOINT_0]
#********************
TYPE = LINEAR
HOME = 0.0
FERROR = 1
MIN_FERROR = 1
MAX_VELOCITY = 80.0
MAX_ACCELERATION = 30.0
P = 40.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
ENCODER_SCALE = 4000.0
OUTPUT_SCALE = 10.0
OUTPUT_MIN_LIMIT = -10.0
OUTPUT_MAX_LIMIT = 10.0
MIN_LIMIT = -0.001
MAX_LIMIT = 55.0
HOME_OFFSET = 0.0
HOME_SEARCH_VEL = -2
HOME_LATCH_VEL = -.1
HOME_FINAL_VEL = -.1
HOME_SEQUENCE = 0
# Axis X
#********************
[AXIS_X]
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
MIN_LIMIT = -0.001
MAX_LIMIT = 55
Replied by bevins on topic Biesse Rover 346 Retrofit
If it worries you that the machine may be jogged the wrong way when trying to get off the hard limit. It would be worth your time and effort to wire the + and - limits separately on thier own inputs into Linuxcnc. I am pretty sure that Linuxcnc will restrict movement in the direction of the sensed limit and only allow the machine to be jogged away from it.
As to your jogging feed rate question, I don't know. What are your settings in your ini file?
I guess I am going to have to wire them in Linuxcnc. Problem is the Z is a bitch to get at. but oh well.
I am not aware that it will change after homing. I cannot find any docs that discuss that point.
This is in the ini file
[DISPLAY]
[DISPLAY]
#DISPLAY = gmoccapy
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_OVERRIDE = 1.000000
MIN_SPINDLE_OVERRIDE = 0.500000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/bob/linuxcnc/nc_files
INCREMENTS = .1in .05in .01in .005in .001in .0005in .0001in
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 1
MAX_LINEAR_VELOCITY = 10.000000
MIN_LINEAR_VELOCITY = 0.016670
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
[JOINT_0]
#********************
TYPE = LINEAR
HOME = 0.0
FERROR = 1
MIN_FERROR = 1
MAX_VELOCITY = 80.0
MAX_ACCELERATION = 30.0
P = 40.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
ENCODER_SCALE = 4000.0
OUTPUT_SCALE = 10.0
OUTPUT_MIN_LIMIT = -10.0
OUTPUT_MAX_LIMIT = 10.0
MIN_LIMIT = -0.001
MAX_LIMIT = 55.0
HOME_OFFSET = 0.0
HOME_SEARCH_VEL = -2
HOME_LATCH_VEL = -.1
HOME_FINAL_VEL = -.1
HOME_SEQUENCE = 0
# Axis X
#********************
[AXIS_X]
MAX_VELOCITY = 1.0
MAX_ACCELERATION = 30.0
MIN_LIMIT = -0.001
MAX_LIMIT = 55
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
07 Feb 2017 22:04 #87494
by bevins
Replied by bevins on topic Biesse Rover 346 Retrofit
I think its MAX_VELOCITY in Axis section.
That is set to 1 which is inches per second, and after homing thats what it is doing which is 60 inches per minute.
That is set to 1 which is inches per second, and after homing thats what it is doing which is 60 inches per minute.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
08 Feb 2017 05:40 #87508
by bevins
Replied by bevins on topic Biesse Rover 346 Retrofit
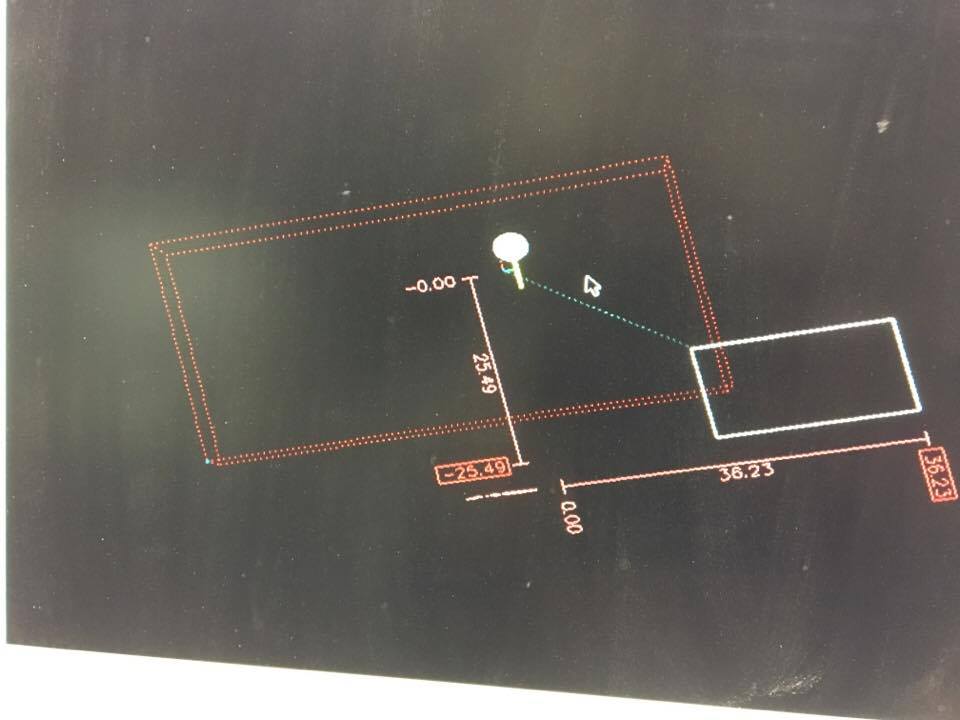
I have Y moving in the correct direction and the dro show correct however in the axis display it shows going in the opposite direction and the -25 should be 25. I am trying to find the error in the ini but cannot.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21689
- Thank you received: 7411
08 Feb 2017 06:29 #87511
by tommylight
Replied by tommylight on topic Biesse Rover 346 Retrofit
Screenshot?
Was it homed before you did that? Does the tool on screen also move in the right direction? Do you have any offsets active? Where is the Y axis home in the ini? It ahould be set at 0, usualy.
Was it homed before you did that? Does the tool on screen also move in the right direction? Do you have any offsets active? Where is the Y axis home in the ini? It ahould be set at 0, usualy.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21689
- Thank you received: 7411
08 Feb 2017 06:31 #87512
by tommylight
Replied by tommylight on topic Biesse Rover 346 Retrofit
Definitely looks like something in the ini, Y 0 should be down, near the X 0.
How did you manage that???")
How did you manage that???
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 19871
- Thank you received: 4640
08 Feb 2017 10:24 #87519
by andypugh
Replied by andypugh on topic Biesse Rover 346 Retrofit
I actually think this might be a misunderstanding.
XYZ positive and negative are all from the point of view of the tool relative to the work.
XYZ positive and negative are all from the point of view of the tool relative to the work.
Please Log in or Create an account to join the conversation.
Time to create page: 0.597 seconds