Biesse Rover 346 Retrofit
- bevins
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1942
- Thank you received: 338
08 Feb 2017 13:11 #87538
by bevins
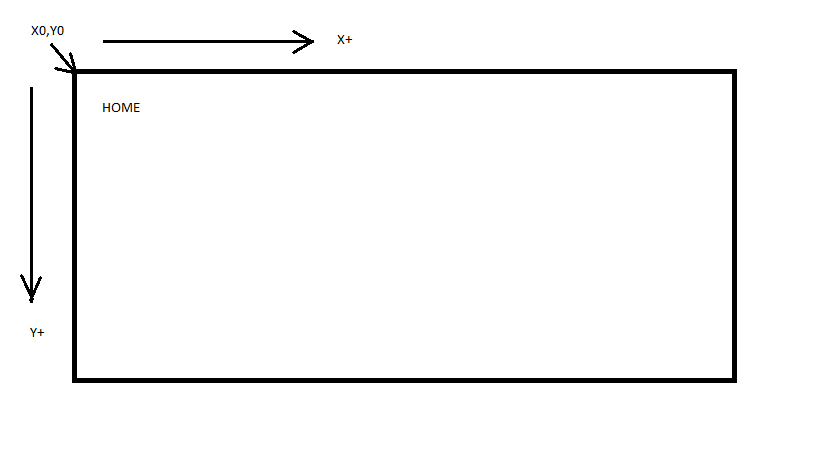
Yes it was homed, top left corner is 0,0 HOME.
the tool on the screen moves in the opposite direction than the machine.
I set zero where it is right now in the pic. work offset. Just moved it to that point and zeroed xyz.
Its at 0.
Replied by bevins on topic Biesse Rover 346 Retrofit
Screenshot?
Was it homed before you did that? Does the tool on screen also move in the right direction? Do you have any offsets active? Where is the Y axis home in the ini? It ahould be set at 0, usualy.
Yes it was homed, top left corner is 0,0 HOME.
the tool on the screen moves in the opposite direction than the machine.
I set zero where it is right now in the pic. work offset. Just moved it to that point and zeroed xyz.
Its at 0.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
08 Feb 2017 13:16 - 08 Feb 2017 13:23 #87539
by bevins
yes, but it places the tool when at 0,0 top left like it is suppose to be.
I dont understand this.
The only thing bizarre in the ini is the homeing I had to switch directions to get it to go in the right direction.
Replied by bevins on topic Biesse Rover 346 Retrofit
I actually think this might be a misunderstanding.
XYZ positive and negative are all from the point of view of the tool relative to the work.
yes, but it places the tool when at 0,0 top left like it is suppose to be.
I dont understand this.
The only thing bizarre in the ini is the homeing I had to switch directions to get it to go in the right direction.
Last edit: 08 Feb 2017 13:23 by bevins.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19871
- Thank you received: 4640
08 Feb 2017 13:41 #87547
by andypugh
Replied by andypugh on topic Biesse Rover 346 Retrofit
To eliminate any confusion, can you give us a picture of the machine annotated with the machine coordinates of the 4 corners of a square on the table.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
08 Feb 2017 13:49 - 08 Feb 2017 13:50 #87551
by bevins
Replied by bevins on topic Biesse Rover 346 Retrofit
Homed top left. The DRO's follow this also.
Last edit: 08 Feb 2017 13:50 by bevins.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Offline
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
08 Feb 2017 13:58 - 08 Feb 2017 14:05 #87553
by Todd Zuercher
Replied by Todd Zuercher on topic Biesse Rover 346 Retrofit
In the part of the ini file you've shown us you have the default velocity for jogging set to 1 (60ipm), that is where the slider is set when you start up. The max jog velocity of 10 (600ipm) is as high as the slider will go. Then under the X axis section you have a max velocity of 1(60ipm. so X can go no faster than that. Y you gave a max of 5(300ipm), Z is limited in the joint 1 section to 1(60ipm) and 2(120ipm in the joint 2 section
Last edit: 08 Feb 2017 14:05 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
08 Feb 2017 14:00 - 08 Feb 2017 14:01 #87554
by Todd Zuercher
Replied by Todd Zuercher on topic Biesse Rover 346 Retrofit
Well what you've drawn above is backwards to the normal Cartesian standard. I suggest you reverse your Y axis.
Last edit: 08 Feb 2017 14:01 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
08 Feb 2017 14:03 #87555
by bevins
thanks Todd. Yes I figured this one out. This is all fine.
Replied by bevins on topic Biesse Rover 346 Retrofit
In the part of the ini file you've shown us you have the default velocity for jogging set to 1 (60ipm), that is where the slider is set when you start up. The max jog velocity of 10 (600ipm) is as high as the slider will go. Then under the X axis section you have a max velocity of 1. so X can go no faster than that. You didn't show us what you have set for the other axis or joints so I can't tell you what you've set for them.
There are about a half a dozen places in the ini file that could limit your max jogging speed.
thanks Todd. Yes I figured this one out. This is all fine.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19871
- Thank you received: 4640
08 Feb 2017 14:09 #87558
by andypugh
Replied by andypugh on topic Biesse Rover 346 Retrofit
Your Y is actually backwards. (and you would make mirror parts with that setup)
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
08 Feb 2017 14:13 #87559
by bevins
So Y should always be negative in this scenario. yeah your right.....
So I'll reverse the encoder scale and output scale....... This will do it?
Replied by bevins on topic Biesse Rover 346 Retrofit
Well what you've drawn above is backwards to the normal Cartesian standard. I suggest you reverse your Y axis.
So Y should always be negative in this scenario. yeah your right.....
So I'll reverse the encoder scale and output scale....... This will do it?
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
08 Feb 2017 14:48 #87564
by Todd Zuercher
Replied by Todd Zuercher on topic Biesse Rover 346 Retrofit
Y Doesn't have to be negative. You can still home to the position you were homing to, but the value given to an axis at the home position is an arbitrary one determined by the setting of HOME_OFFSET in the ini file (and HOME is the position where the machine will park after touching off to the home switch). This only sets the machine coordinate system, that doesn't really matter much any way, what really matters is what the work coordinates are set to.
Please Log in or Create an account to join the conversation.
Time to create page: 2.695 seconds