scurve trajectory planner
- Beef
-

- Offline
- Senior Member
-

Less
More
- Posts: 43
- Thank you received: 54
23 Jan 2025 11:44 #319707
by Beef
Replied by Beef on topic scurve trajectory planner
Wild guess, as I haven't looked at all, but it may be related to the compensation logic (used for backlash etc) - as I remember it's hard coded to allow 200% accels to fix position errors and is used for example for backlash and mapping and could cause such behaviors if it is involved in some way.
Please Log in or Create an account to join the conversation.
- Grotius
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
23 Jan 2025 21:59 #319736
by Grotius
Replied by Grotius on topic scurve trajectory planner
Get same results when calculating vel for joint.0 inside the planner. Havent figured it out yet. I thought maybe split cycle. But have to dive deeper into it. Will do a motion test tomorrow.
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
24 Jan 2025 12:45 #319754
by Grotius
Replied by Grotius on topic scurve trajectory planner
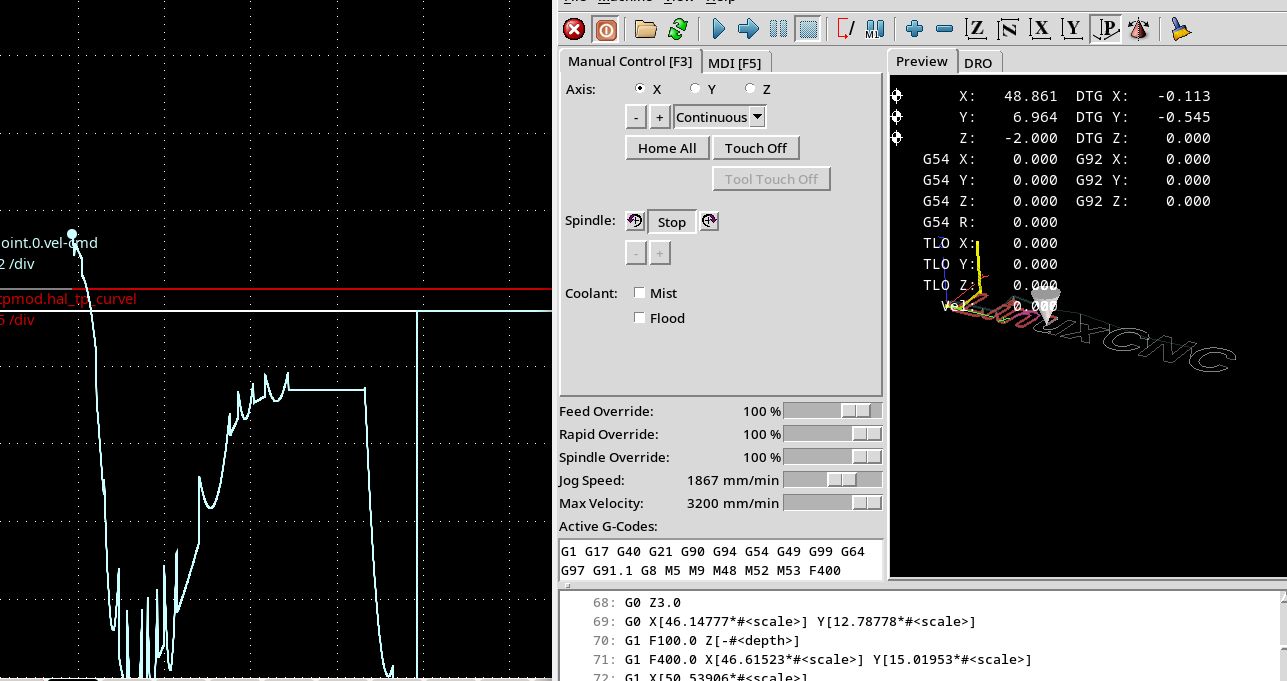
In this example no scurve is active. The traject position is incremented 0.01mm each cycle.
The spikes are caused by bspline interpolation.
Even when the bspline has a high resolution like 1000 points. It wont change.
So maybe change it to a linestrip. and then interpolate the linestrip. See what happens.
The spikes are caused by bspline interpolation.
Even when the bspline has a high resolution like 1000 points. It wont change.
So maybe change it to a linestrip. and then interpolate the linestrip. See what happens.
The following user(s) said Thank You: Darium, Beef
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
24 Jan 2025 16:24 #319766
by Grotius
Replied by Grotius on topic scurve trajectory planner
Hi,
The spikes are solved. Problem was found. Not havely tested, just one video.
1. Using a linestrip derived from a bspline seems to work ok.
2. Slightly changed the scurve algo.
Code is updated.
The spikes are solved. Problem was found. Not havely tested, just one video.
1. Using a linestrip derived from a bspline seems to work ok.
2. Slightly changed the scurve algo.
Code is updated.
The following user(s) said Thank You: tommylight, HalaszAttila, pommen, Darium, anton610, Unlogic
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
24 Jan 2025 19:30 #319778
by Grotius
Replied by Grotius on topic scurve trajectory planner
@Hmnijp,
I can provide all the programs I used for the comparison, maybe it will help to fix the errors.
Yes indeed.
Please provide the programs.
To be reviewed, fixed:
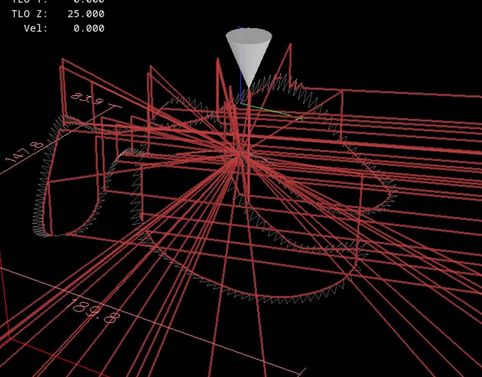
I really like this example:
I can provide all the programs I used for the comparison, maybe it will help to fix the errors.
Yes indeed.
Please provide the programs.
To be reviewed, fixed:
I really like this example:
Attachments:
Please Log in or Create an account to join the conversation.
- juliankoenig87
- Offline
- Premium Member
-

Less
More
- Posts: 119
- Thank you received: 55
24 Jan 2025 19:43 #319780
by juliankoenig87
Replied by juliankoenig87 on topic scurve trajectory planner
Hi Grotius. I can also provide a non functional code. Works as it should with the standard tp with 2.9.3.
With scurve tp it jumps all over the place. 9axis sim machine or a self configured machine is no difference. Also your given 3axis mm machine with a added 4 axis is the same.
With scurve tp it jumps all over the place. 9axis sim machine or a self configured machine is no difference. Also your given 3axis mm machine with a added 4 axis is the same.
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
24 Jan 2025 22:15 - 24 Jan 2025 22:17 #319789
by Grotius
Replied by Grotius on topic scurve trajectory planner
@Julian,
Thanks for the interesting file.
The first problem is solved :
1. Buffer overflow.
-> cause : tcqFull() function was not used.
-> solution : tcqFull() function now uses a max buffer size to prevent buffer overflow. Default = 1000.
The second problem is not solved today:
2. It run's up to ca 1000 lines. Then it hang's.

-> cause : tiny segment length's : 0.007mm.
-> solution : review, recode the abc, uvw part of the planner step by step.
Thanks for the interesting file.
The first problem is solved :
1. Buffer overflow.
-> cause : tcqFull() function was not used.
-> solution : tcqFull() function now uses a max buffer size to prevent buffer overflow. Default = 1000.
The second problem is not solved today:
2. It run's up to ca 1000 lines. Then it hang's.
-> cause : tiny segment length's : 0.007mm.
-> solution : review, recode the abc, uvw part of the planner step by step.
Last edit: 24 Jan 2025 22:17 by Grotius.
Please Log in or Create an account to join the conversation.
- spumco
- Offline
- Platinum Member
-
Less
More
- Posts: 2118
- Thank you received: 879
25 Jan 2025 01:33 #319799
by spumco
I can confirm that LCNC 2.10 disables feed-hold while synchronized motion is in progress. FH has no effect during a G33 or G33.1 command until after the synch move is complete.
Replied by spumco on topic scurve trajectory planner
Don’t make that assumption re feedhold. And tapping. The planner is taking things direct from the Hal pin. Not from the lcnc motmod module.
it needs to be explicitly tested. Unless someone has done so already and can confirm what the behaviour is.
I can confirm that LCNC 2.10 disables feed-hold while synchronized motion is in progress. FH has no effect during a G33 or G33.1 command until after the synch move is complete.
Please Log in or Create an account to join the conversation.
- juliankoenig87
- Offline
- Premium Member
-
Less
More
- Posts: 119
- Thank you received: 55
25 Jan 2025 07:00 #319804
by juliankoenig87
Replied by juliankoenig87 on topic scurve trajectory planner
@Grotius
Glad I can help. Yes, the code is stupid fine detailed. So for me it is a benchmark (standard tp has trouble to keep the speed, your tp is in generell faster) and not a "normal" everyday nc code. I have the code with different segment length, but the longer ones also hangs up after a while.
I played a little with the cycle time of axis. There is something going on, but I didnt get it. Maybe after you finished your steps we can go into the topic cycle time? I saw that you use a way shorter time than default. But maybe it is just a unknowledge on my side.
Glad I can help. Yes, the code is stupid fine detailed. So for me it is a benchmark (standard tp has trouble to keep the speed, your tp is in generell faster) and not a "normal" everyday nc code. I have the code with different segment length, but the longer ones also hangs up after a while.
I played a little with the cycle time of axis. There is something going on, but I didnt get it. Maybe after you finished your steps we can go into the topic cycle time? I saw that you use a way shorter time than default. But maybe it is just a unknowledge on my side.
Please Log in or Create an account to join the conversation.
- Joco
-

- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
25 Jan 2025 08:31 #319805
by Joco
Replied by Joco on topic scurve trajectory planner
And that behaviour continues under scurve planner? That was what I was referring to. Not what standard planner does.
Don’t make that assumption re feedhold. And tapping. The planner is taking things direct from the Hal pin. Not from the lcnc motmod module.
it needs to be explicitly tested. Unless someone has done so already and can confirm what the behaviour is.
I can confirm that LCNC 2.10 disables feed-hold while synchronized motion is in progress. FH has no effect during a G33 or G33.1 command until after the synch move is complete.
Please Log in or Create an account to join the conversation.
Time to create page: 0.283 seconds