Ethercat HAL driver
- udoS
- Offline
- Elite Member
-

Less
More
- Posts: 216
- Thank you received: 25
20 Sep 2021 20:38 #221231
by udoS
Replied by udoS on topic Ethercat HAL driver
Just so I understand correctly.
You already have the coordinates of your moving part on the rip available. ( say: just 3 float numbers ; )
You need those 3 numbers transferred to your PC into the cnc. So, it's a matter of testing, but you could stream these coordinates over the Wifi of the RPi to your PC.
What camera do you use and what's the software for position recognition. I don' think that the latency of the RPi4 is the problem.
look from 45sec on. This is all running on a RPi4 ;
Best rgds Udo
You already have the coordinates of your moving part on the rip available. ( say: just 3 float numbers ; )
You need those 3 numbers transferred to your PC into the cnc. So, it's a matter of testing, but you could stream these coordinates over the Wifi of the RPi to your PC.
What camera do you use and what's the software for position recognition. I don' think that the latency of the RPi4 is the problem.
look from 45sec on. This is all running on a RPi4 ;
Best rgds Udo
Please Log in or Create an account to join the conversation.
- yrodriguez1234
- Offline
- New Member
-

Less
More
- Posts: 7
- Thank you received: 0
20 Sep 2021 23:20 - 20 Sep 2021 23:31 #221234
by yrodriguez1234
Replied by yrodriguez1234 on topic Ethercat HAL driver
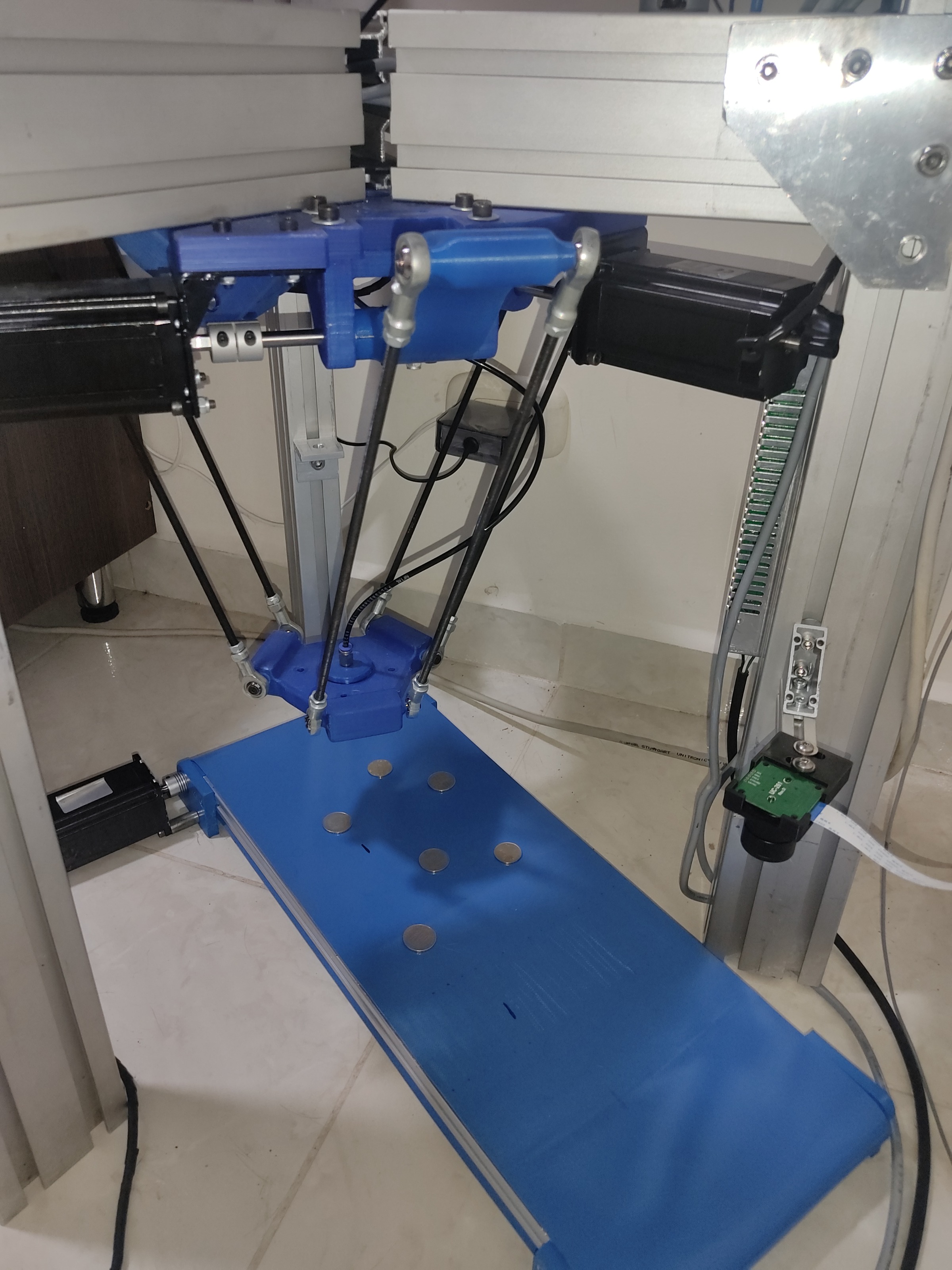
I have a rpi + picamera with opencv 4.5 to position and orientation measurement, the PC with LCNC control 4 stepper motor through paralell Port and every pulse output is a 20khz, now the set of position need be send to PC but I don't know how to do it.
Could You told me how stream position from rpi to PC using whatever comunication method.
The latency on LCNC on rpi increase when a use opencv to image processing and don't let me get 20khz, for this a use PC to control three robot axis and one axis to conveyor and after put adicional axis for a rotation gripper.
Could You told me how stream position from rpi to PC using whatever comunication method.
The latency on LCNC on rpi increase when a use opencv to image processing and don't let me get 20khz, for this a use PC to control three robot axis and one axis to conveyor and after put adicional axis for a rotation gripper.
Attachments:
Last edit: 20 Sep 2021 23:31 by yrodriguez1234.
Please Log in or Create an account to join the conversation.
- udoS
- Offline
- Elite Member
-
Less
More
- Posts: 216
- Thank you received: 25
21 Sep 2021 11:27 #221259
by udoS
Replied by udoS on topic Ethercat HAL driver
@yrodriguez
First: very nice, clean setup. My compliments.
As I understand you do NOT need the ethercat master on the RPI, you only use it for the camera and the position recognition.
If you can make up your mind to go for the Epocat slave HAT then you can easy bring your data to your PC with the ethercat master on the PC.
I could help you on that for the plugin component.
If speed is not an issue and you do not use the tcp-port on the RPi, then you could use a client/server socket solution over tcp writing the data directly into the HAL of Lcnc.
If you need more speed or accuracy consider the FR1000 from Bausano, giving you 5 axis Puls/dir over ethercat plus some additional I/O.
Best Rgds. udo
First: very nice, clean setup. My compliments.
As I understand you do NOT need the ethercat master on the RPI, you only use it for the camera and the position recognition.
If you can make up your mind to go for the Epocat slave HAT then you can easy bring your data to your PC with the ethercat master on the PC.
I could help you on that for the plugin component.
If speed is not an issue and you do not use the tcp-port on the RPi, then you could use a client/server socket solution over tcp writing the data directly into the HAL of Lcnc.
If you need more speed or accuracy consider the FR1000 from Bausano, giving you 5 axis Puls/dir over ethercat plus some additional I/O.
Best Rgds. udo
Please Log in or Create an account to join the conversation.
- yrodriguez1234
- Offline
- New Member
-
Less
More
- Posts: 7
- Thank you received: 0
21 Sep 2021 14:05 #221269
by yrodriguez1234
Replied by yrodriguez1234 on topic Ethercat HAL driver
I was thinked to use ethercat to sending parts position from rpi to PC controller but as both are setup master ethercat i can not comunicate it.
Now i don't goint to use ethercat i goint to use tcp port of rpi and tcp port of PC with a client/server socket to send position of parts like udo sugested, but I don't know use a socket, could You help me with it, i great you.
Now i don't goint to use ethercat i goint to use tcp port of rpi and tcp port of PC with a client/server socket to send position of parts like udo sugested, but I don't know use a socket, could You help me with it, i great you.
Please Log in or Create an account to join the conversation.
- udoS
- Offline
- Elite Member
-
Less
More
- Posts: 216
- Thank you received: 25
21 Sep 2021 18:54 #221290
by udoS
Replied by udoS on topic Ethercat HAL driver
I did some basics today. So this is where you can start.
This is client /server socket setup. I will test tomorrow with some data.
Best Regards udo
This is client /server socket setup. I will test tomorrow with some data.
Best Regards udo
Please Log in or Create an account to join the conversation.
- udoS
- Offline
- Elite Member
-
Less
More
- Posts: 216
- Thank you received: 25
21 Sep 2021 21:42 #221296
by udoS
Replied by udoS on topic Ethercat HAL driver
Well , that is what it looks now.
Please Log in or Create an account to join the conversation.
- endian
-

- Offline
- Platinum Member
-

Less
More
- Posts: 336
- Thank you received: 132
29 Sep 2021 11:44 - 29 Sep 2021 11:44 #221824
by endian
Replied by endian on topic Ethercat HAL driver
hello guys,
Is here any possible way to run these next drivers -
Kollmorgen S300/S700
Danaher S300/S700
Telemecanique(Schneider electric) LXM 15, etc..
Kollmorgen S400/S600
Danaher S400/S600
Beckhoff AX2000, AX2003, etc...
Telemecanique(Schneider electric) MHDA, etc..
under ethercat please? I found NO possibility to turn it on to CSP mode. There is just supported next modes :
0x6060 register and values
hex name
80 Digital velocity control mode
81 Analogue velocity control mode
82 Digital current control mode
83 Analog current control mode
84 Electronic gearing
85 reserved
86 reserved
87 reserved
88 Motion task mode
1 Profile position mode
3 Profile velocity mode
4 Profile torque mode
Homing mode
7 Interpolated position mode
thanks Slav
Is here any possible way to run these next drivers -
Kollmorgen S300/S700
Danaher S300/S700
Telemecanique(Schneider electric) LXM 15, etc..
Kollmorgen S400/S600
Danaher S400/S600
Beckhoff AX2000, AX2003, etc...
Telemecanique(Schneider electric) MHDA, etc..
under ethercat please? I found NO possibility to turn it on to CSP mode. There is just supported next modes :
0x6060 register and values
hex name
80 Digital velocity control mode
81 Analogue velocity control mode
82 Digital current control mode
83 Analog current control mode
84 Electronic gearing
85 reserved
86 reserved
87 reserved
88 Motion task mode
1 Profile position mode
3 Profile velocity mode
4 Profile torque mode
Homing mode
7 Interpolated position mode
thanks Slav
Last edit: 29 Sep 2021 11:44 by endian.
Please Log in or Create an account to join the conversation.
- udoS
- Offline
- Elite Member
-
Less
More
- Posts: 216
- Thank you received: 25
30 Sep 2021 05:52 #221868
by udoS
Replied by udoS on topic Ethercat HAL driver
Sorry foxington; What do you mean by next drivers-
and what drive do you want to connect;
and what drive do you want to connect;
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
30 Sep 2021 08:44 #221873
by db1981
Replied by db1981 on topic Ethercat HAL driver
Hello,
you can use any of these drives.
the simplest and fastest way would be to use them in Velocity control mode with the position pid implemented in linuxcnc.
with a little bit of research, interpolated position mode should behave similar to csp mode.
you can use any of these drives.
the simplest and fastest way would be to use them in Velocity control mode with the position pid implemented in linuxcnc.
with a little bit of research, interpolated position mode should behave similar to csp mode.
Please Log in or Create an account to join the conversation.
- udoS
- Offline
- Elite Member
-
Less
More
- Posts: 216
- Thank you received: 25
30 Sep 2021 12:04 #221886
by udoS
Replied by udoS on topic Ethercat HAL driver
Hi foxington: Please have a look here in particular chapter 8.5 Cyclic sync pos mode.
CiA directive goes for all communication protocols. Also for ether-CAT's.
www.ethernet-powerlink.org/fileadmin/use...EPSG_V_0_0_2__1_.pdf
CiA directive goes for all communication protocols. Also for ether-CAT's.
www.ethernet-powerlink.org/fileadmin/use...EPSG_V_0_0_2__1_.pdf
Please Log in or Create an account to join the conversation.
Time to create page: 0.694 seconds