Ethercat HAL driver
- Piotr
- Offline
- New Member
-

Less
More
- Posts: 2
- Thank you received: 0
06 Dec 2017 19:50 #102729
by Piotr
Replied by Piotr on topic Ethercat HAL driver
Typo appeared when rewriting the code on the forum.
Parameter 0X2212 should be equal to 0?
Currently, the servo motor is not connected to the inverter, can it be a problem?
Parameter 0X2212 should be equal to 0?
Currently, the servo motor is not connected to the inverter, can it be a problem?
Please Log in or Create an account to join the conversation.
- sirop
-

- Offline
- Elite Member
-

Less
More
- Posts: 193
- Thank you received: 57
06 Dec 2017 22:46 #102733
by sirop
Your error message originates from github.com/sittner/linuxcnc-ethercat/blo..._stmds5k.c#L120-L121 .
I do not have the manual of your slave , so can not say much about the SDO request.
If, however, it just takes too much time -- although being successful -- then it may be worth to increase LCEC_SDO_REQ_TIMEOUT
in github.com/sittner/linuxcnc-ethercat/blo...rc/lcec_main.c#L1140 .
Do not know if the servo motor not connected to the inverter can be a problem .
Replied by sirop on topic Ethercat HAL driver
Typo appeared when rewriting the code on the forum.
Parameter 0X2212 should be equal to 0?
Currently, the servo motor is not connected to the inverter, can it be a problem?
Your error message originates from github.com/sittner/linuxcnc-ethercat/blo..._stmds5k.c#L120-L121 .
I do not have the manual of your slave , so can not say much about the SDO request.
If, however, it just takes too much time -- although being successful -- then it may be worth to increase LCEC_SDO_REQ_TIMEOUT
in github.com/sittner/linuxcnc-ethercat/blo...rc/lcec_main.c#L1140 .
Do not know if the servo motor not connected to the inverter can be a problem .
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
22 Jan 2018 18:44 - 22 Jan 2018 18:45 #104859
by chimeno
Replied by chimeno on topic Ethercat HAL driver
Hello everyone,
I'm trying to run el3773 with linuxcnc-ethercat and I can not get to OP in DC-mode, I think it's synchronization configuration problem but I do not see the one, can someone help me?
Thank you
Chimeno
I'm trying to run el3773 with linuxcnc-ethercat and I can not get to OP in DC-mode, I think it's synchronization configuration problem but I do not see the one, can someone help me?
Thank you
Chimeno
Last edit: 22 Jan 2018 18:45 by chimeno.
Please Log in or Create an account to join the conversation.
- sirop
-
- Offline
- Elite Member
-
Less
More
- Posts: 193
- Thank you received: 57
22 Jan 2018 19:45 #104863
by sirop
Replied by sirop on topic Ethercat HAL driver
Compare with github.com/sittner/linuxcnc-ethercat/blo...thercat-conf.xml#L13
and then try730 is actually a hex number but without preceding 0x, as I remember vaguely,
sync0Cycle="*1" means the EtherCat cycle is LinuxCNC cycle*1.
To determine what sync0Shift could be, you should read some EtherCAT docs.
and then try
<slave idx="1" type="EL3773" name="EL3773">
<dcConf assignActivate="730" sync0Cycle="*1" sync0Shift="25000" />
</slave>sync0Cycle="*1" means the EtherCat cycle is LinuxCNC cycle*1.
To determine what sync0Shift could be, you should read some EtherCAT docs.
The following user(s) said Thank You: chimeno, Nico2017
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
22 Jan 2018 20:48 #104867
by chimeno
Replied by chimeno on topic Ethercat HAL driver
Hello Sirop,
Thank you very much, I tried with the configuration that you tell me but I was still in PREOP E state, I think that something I do not have well configured, I will continue reading the manual, thanks.
Chimeno
Thank you very much, I tried with the configuration that you tell me but I was still in PREOP E state, I think that something I do not have well configured, I will continue reading the manual, thanks.
Chimeno
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
24 Jan 2018 21:06 - 25 Jan 2018 06:14 #104963
by chimeno
Replied by chimeno on topic Ethercat HAL driver
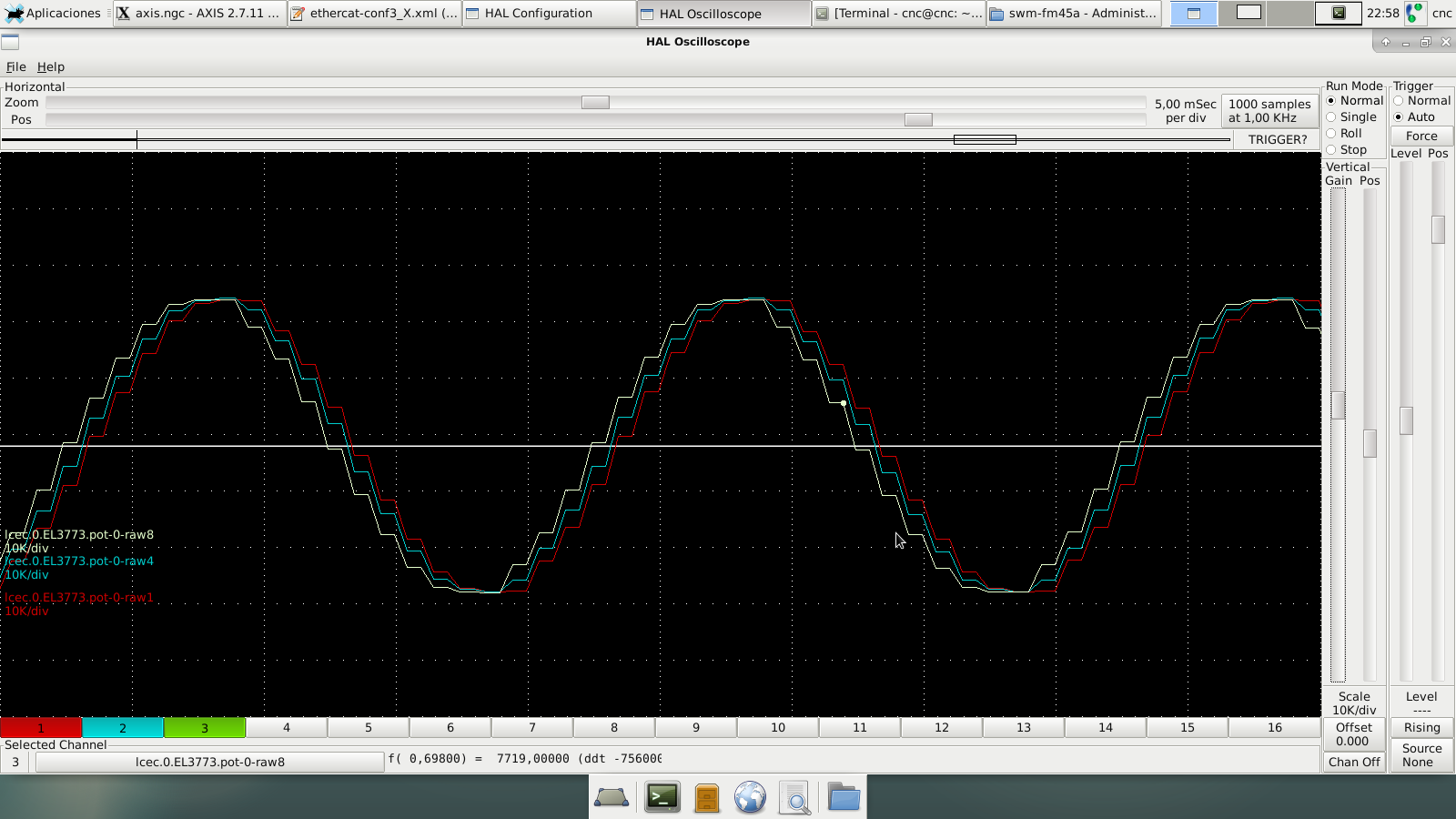
hello Sirop again, I can finally control it in DC mode, this is my configuration:
EL3773
cycle time 1000000
I enable 8 Sudindex = 125000 * 8 sudindex (Samples) = 1000000
sync0Cycle = 125000
sync0Shift = 0
sync1Cycle = sync0Cycle * 7 = 875000 <cycle time
sync1Shift = 0
<master idx = "0" appTimePeriod = "1000000" refClockSyncCycles = "125">
<slave idx = "0" type = "EK1100" name = "EK1100" />
<slave idx = "1" type = "EL3773" name = "EL3773">
<dcConf assignActivate = "730" sync0Cycle = "125000" sync0Shift = "0" sync1Cycle = "875000" sync1Shift = "0 />
</ slave>
I attached the halscope image reading alternating current.
I have a question, reading the manuals would have to be the sync1Cycle = cycle time? Do you know something about it?
Thank you
chimeno
EL3773
cycle time 1000000
I enable 8 Sudindex = 125000 * 8 sudindex (Samples) = 1000000
sync0Cycle = 125000
sync0Shift = 0
sync1Cycle = sync0Cycle * 7 = 875000 <cycle time
sync1Shift = 0
<master idx = "0" appTimePeriod = "1000000" refClockSyncCycles = "125">
<slave idx = "0" type = "EK1100" name = "EK1100" />
<slave idx = "1" type = "EL3773" name = "EL3773">
<dcConf assignActivate = "730" sync0Cycle = "125000" sync0Shift = "0" sync1Cycle = "875000" sync1Shift = "0 />
</ slave>
I attached the halscope image reading alternating current.
I have a question, reading the manuals would have to be the sync1Cycle = cycle time? Do you know something about it?
Thank you
chimeno
Last edit: 25 Jan 2018 06:14 by chimeno.
Please Log in or Create an account to join the conversation.
- sirop
-
- Offline
- Elite Member
-
Less
More
- Posts: 193
- Thank you received: 57
26 Jan 2018 13:52 #105038
by sirop
Replied by sirop on topic Ethercat HAL driver
Sorry for a late answer.
As I said somewhere above, I would only experiment with cycle0Shift.
I never used sync1Cycle .
Maybe, lectoraatmechatronica.wikispaces.com/fil...AT+communication.pdf P. 83 can help you.
As I said somewhere above, I would only experiment with cycle0Shift.
I never used sync1Cycle .
Maybe, lectoraatmechatronica.wikispaces.com/fil...AT+communication.pdf P. 83 can help you.
The following user(s) said Thank You: chimeno
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
26 Jan 2018 20:54 - 27 Jan 2018 15:53 #105056
by chimeno
Replied by chimeno on topic Ethercat HAL driver
hi Sirop,
tried with this configuration:
eL3773 configuration
subindex (samples) = 1 sample = according to manual 1000us
1C33: 02 Cycle time Cycle time (in ns):
• Free Run: Cycle time of the local timer
• Synchronous with SM 2 event: Master cycle
time
• DC-Mode: SYNC0 / SYNC1 Cycle Time
cycleTime = f4240 (10000000)
1C33: 01 Sync mode Current synchronization mode:
• Bit 0 = 0: Free Run
• Bit 0 = 1: Synchron with SM 2 Event
• Bit 0-1 = 11: DC with SYNC1 event
• Bit 15 = 1: Fast Mode
Sync mode 0x0002 (2)
<slave idx = "1" type = "EL3773" name = "EL3773">
<dcConf assignActivate = "730" sync0Cycle = "* 1" sync0Shift = "25000" />
</ slave>
the state stays in PREOP E,
is it necessary in "DC MODE" to have sync1 activated? any solution?
if I do not activate the sync1 it gives me sync error.
Tested with the TWINCAT3 application
Synchronism errors until reaching 0x8140 sync Error
I'm looking at the manual that you've given me, thank you very much.
Chimeno
tried with this configuration:
eL3773 configuration
subindex (samples) = 1 sample = according to manual 1000us
1C33: 02 Cycle time Cycle time (in ns):
• Free Run: Cycle time of the local timer
• Synchronous with SM 2 event: Master cycle
time
• DC-Mode: SYNC0 / SYNC1 Cycle Time
cycleTime = f4240 (10000000)
1C33: 01 Sync mode Current synchronization mode:
• Bit 0 = 0: Free Run
• Bit 0 = 1: Synchron with SM 2 Event
• Bit 0-1 = 11: DC with SYNC1 event
• Bit 15 = 1: Fast Mode
Sync mode 0x0002 (2)
<slave idx = "1" type = "EL3773" name = "EL3773">
<dcConf assignActivate = "730" sync0Cycle = "* 1" sync0Shift = "25000" />
</ slave>
the state stays in PREOP E,
is it necessary in "DC MODE" to have sync1 activated? any solution?
if I do not activate the sync1 it gives me sync error.
Tested with the TWINCAT3 application
Synchronism errors until reaching 0x8140 sync Error
I'm looking at the manual that you've given me, thank you very much.
Chimeno
Last edit: 27 Jan 2018 15:53 by chimeno.
Please Log in or Create an account to join the conversation.
- sirop
-
- Offline
- Elite Member
-
Less
More
- Posts: 193
- Thank you received: 57
29 Jan 2018 10:37 #105150
by sirop
Replied by sirop on topic Ethercat HAL driver
First of all and again, I have never solved the DC problem at my site as I did not have to yet,
but I'll have to so somewhere in spring and therefore I am interested in this discussion.
<dcConf assignActivate = "730" sync0Cycle = "* 1" sync0Shift = "25000" />
So does TWINCAT3 application still yields any sync errors after your increasing sync0Shift to 500000?
Maybe, you should also ask your question on this thread lists.etherlab.org/pipermail/etherlab-users/2018/003281.html .
but I'll have to so somewhere in spring and therefore I am interested in this discussion.
<dcConf assignActivate = "730" sync0Cycle = "* 1" sync0Shift = "25000" />
So does TWINCAT3 application still yields any sync errors after your increasing sync0Shift to 500000?
Maybe, you should also ask your question on this thread lists.etherlab.org/pipermail/etherlab-users/2018/003281.html .
The following user(s) said Thank You: chimeno
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
Less
More
- Posts: 295
- Thank you received: 125
30 Jan 2018 20:08 #105207
by chimeno
Replied by chimeno on topic Ethercat HAL driver
Hello Sirop,
if it is a good idea to try to work in DC mode, for the AX5000 servos I sometimes get synchronization problems because of the SYNC1 because the event is not completed.
EL3773 I can not make it work only with sync0, I guess I must do something wrong in the configuration, I'll keep looking and trying different configurations, I'll look at the link that you give me if I get some solution.
Thank you
Chimeno
if it is a good idea to try to work in DC mode, for the AX5000 servos I sometimes get synchronization problems because of the SYNC1 because the event is not completed.
EL3773 I can not make it work only with sync0, I guess I must do something wrong in the configuration, I'll keep looking and trying different configurations, I'll look at the link that you give me if I get some solution.
Thank you
Chimeno
Please Log in or Create an account to join the conversation.
Time to create page: 0.256 seconds