Ethercat random jitter fix
- grandixximo
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 307
- Thank you received: 367
18 Apr 2026 07:29 #345686
by grandixximo
Replied by grandixximo on topic Ethercat random jitter fix
@papagno-source, can we continue in discord, it is really hard to follow up with you here.
I am testing with generic driver, is the problem the OP time, or the grinding?
I am testing with generic driver, is the problem the OP time, or the grinding?
Please Log in or Create an account to join the conversation.
- papagno-source
- Offline
- Elite Member
-
Less
More
- Posts: 170
- Thank you received: 13
18 Apr 2026 07:35 #345687
by papagno-source
Replied by papagno-source on topic Ethercat random jitter fix
There are two problems:
The delay in reading the slave pins when the GUI starts, and the noise the axes make during movement.
Clearly, the main problem is the noise from the axes, because while they move normally, sometimes you hear jumps, noises that represent non-smooth movement.
The machine cannot operate this way, also because the noise is loud.
The problem of updating the positions at startup is secondary, not fundamental to the actual use of the machine. Sure, it's unsightly for a CNC system, but it only requires a few seconds of delay.
The delay in reading the slave pins when the GUI starts, and the noise the axes make during movement.
Clearly, the main problem is the noise from the axes, because while they move normally, sometimes you hear jumps, noises that represent non-smooth movement.
The machine cannot operate this way, also because the noise is loud.
The problem of updating the positions at startup is secondary, not fundamental to the actual use of the machine. Sure, it's unsightly for a CNC system, but it only requires a few seconds of delay.
Please Log in or Create an account to join the conversation.
- papagno-source
- Offline
- Elite Member
-
Less
More
- Posts: 170
- Thank you received: 13
18 Apr 2026 07:40 #345688
by papagno-source
Replied by papagno-source on topic Ethercat random jitter fix
About discor. are logged , but how logged in linuxcnc ?
Please Log in or Create an account to join the conversation.
- grandixximo
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 307
- Thank you received: 367
18 Apr 2026 07:41 - 18 Apr 2026 08:04 #345689
by grandixximo
Replied by grandixximo on topic Ethercat random jitter fix
You are still doing the install, and cannot get the system online?
the discord you joint the channel, go the the welcome, read the rules, thumb up the rules, and you can join in general
read the instructions and the rules to joint the linuxcnc channel, they are there when you try to join the channel
edit:
you need to confirm email, and maybe phone number
then add server in discord
discord.gg/uW7KXqMw
then you need to go to the rules, and thumbs up react to the first message in the rules, here you see #rules and you click it

here you see this message and you click the hand with the thumb up
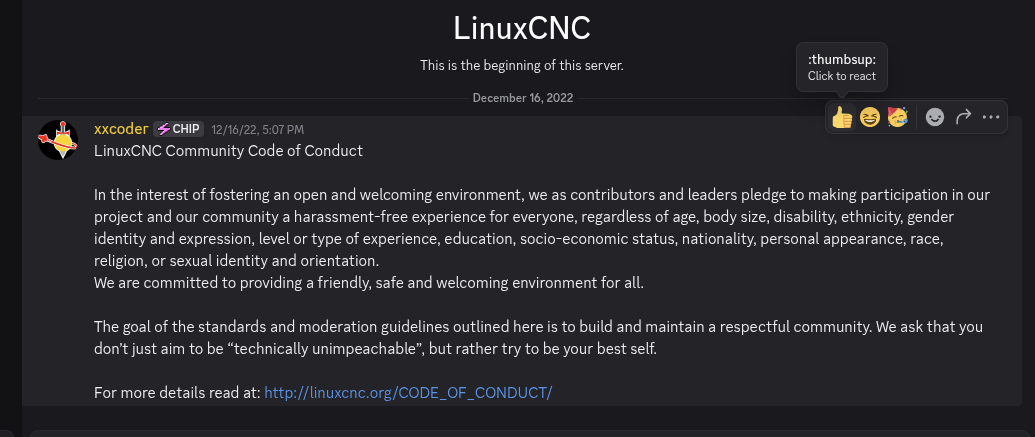
Then you will be able to write in the linuxcnc general channel with everyone else, I also PM you in discord, but you seem offline.
the discord you joint the channel, go the the welcome, read the rules, thumb up the rules, and you can join in general
read the instructions and the rules to joint the linuxcnc channel, they are there when you try to join the channel
edit:
you need to confirm email, and maybe phone number
then add server in discord
discord.gg/uW7KXqMw
then you need to go to the rules, and thumbs up react to the first message in the rules, here you see #rules and you click it
here you see this message and you click the hand with the thumb up
Then you will be able to write in the linuxcnc general channel with everyone else, I also PM you in discord, but you seem offline.
Attachments:
Last edit: 18 Apr 2026 08:04 by grandixximo.
Please Log in or Create an account to join the conversation.
- papagno-source
- Offline
- Elite Member
-
Less
More
- Posts: 170
- Thank you received: 13
18 Apr 2026 08:03 - 18 Apr 2026 08:06 #345690
by papagno-source
Replied by papagno-source on topic Ethercat random jitter fix
I stay logged here
Attachments:
Last edit: 18 Apr 2026 08:06 by papagno-source.
Please Log in or Create an account to join the conversation.
- grandixximo
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 307
- Thank you received: 367
18 Apr 2026 08:05 - 18 Apr 2026 08:07 #345691
by grandixximo
Replied by grandixximo on topic Ethercat random jitter fix
click on the + sign top left
and joint this channel
discord.gg/uW7KXqMw
or you can add me as grandixximo, just search for friends, I already sent you an invitation, but never got accepted
and joint this channel
discord.gg/uW7KXqMw
or you can add me as grandixximo, just search for friends, I already sent you an invitation, but never got accepted
Last edit: 18 Apr 2026 08:07 by grandixximo.
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 11994
- Thank you received: 4084
18 Apr 2026 13:36 #345698
by rodw
Replied by rodw on topic Ethercat random jitter fix
Don't forget the hardware manufacturers have been adding power saving features for years even back with Debian 10. But Linux simply ignored these features but now the kernel has caught up. It had to stay current. Generally, there are settings to disable them. Also there are a lot of new network cards often part of the motherboard that do not have driver support until Debian 11 or 12 or 13. So Debian 10 is an unsupported version now so you can;t continue to live in the past. Generally with proper tuning , 4 core and up hardware runs well on the later kernels.I have question at AI:
ethercat on debian 10 with kernel 4.19 and linuxcnc has less latency than debian 13 with kernel 6.12. Why?
The following user(s) said Thank You: endian
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
18 Apr 2026 15:14 #345701
by Hakan
Replied by Hakan on topic Ethercat random jitter fix
4.19 was good. Remember I struggled with 6.x when it came out.
Anyway, what I do now is to have an Intel network card, i210, i217 or i225/i226
and make a modest effort to reduce jitter and latency.
The way I determine it's good enough is when there are no messages in syslog of this kindAll such messages have to go, well one in the beginning is ok, but not more.
I may or may not need to go to isolcpus and so on. On my current plasma system I have no
such tweaks at all. It works good anyway.
Anyway, what I do now is to have an Intel network card, i210, i217 or i225/i226
and make a modest effort to reduce jitter and latency.
The way I determine it's good enough is when there are no messages in syslog of this kind
[18493.421281] EtherCAT WARNING 0: 2 datagrams TIMED OUT!
[18493.421295] EtherCAT WARNING 0: 2 datagrams UNMATCHED!I may or may not need to go to isolcpus and so on. On my current plasma system I have no
such tweaks at all. It works good anyway.
Please Log in or Create an account to join the conversation.
- papagno-source
- Offline
- Elite Member
-
Less
More
- Posts: 170
- Thank you received: 13
18 Apr 2026 17:20 #345706
by papagno-source
Replied by papagno-source on topic Ethercat random jitter fix
I was thinking, can we ask the kernel developers, how can we recompile the kernel, eliminating all the power optimizations, so as to optimize it for RT applications? If we continue like this, soon Linux will only be used for writing emails and using OpenOffice.
The following user(s) said Thank You: ClarkSavage
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11994
- Thank you received: 4084
18 Apr 2026 19:12 - 18 Apr 2026 19:13 #345708
by rodw
There is no need to dive into the kernel. All of the power saving kernel options are already set in my optimisations via the kernel boot options. You would just shorten your kernel boot string.
Grandixximo proved that a custom 6.3 kernel I built a long time ago no longer makes any difference now we understand how to configure a modern kernel.. Having run most kernels since 5.10, latency has actually improved. My original J1900 from 8-10 years ago was at around 130k ns jitter is now down to about 50k or less when optimised.
What has changed is all the networking power settings that need to be carefully mitigated. The problem here is by definition networking was never designed to be real time, but to be a forwarding type of communication protocol through hundreds of switches around the internet. So network drivers are not real time.
You could write your own driver using the DDPK www.dpdk.org/ which eliminates the latency from interrupt context switching and uses polling instead. But it still isn't real time. We are not doing High Frequency Trading where every millisecond of latency affects financial returns so this is not necessary in a CNC environment.
You could use Time Sensitive Networking (TSN) which is now in the kernel and supported by Ethercat but its hardware dependent so your slave needs to support it. tsn.readthedocs.io/
Remember PREMPT_RT is not fast, its deterministic (reliable and on time) which is exactly what we need for our servo thread.
Replied by rodw on topic Ethercat random jitter fix
I was thinking, can we ask the kernel developers, how can we recompile the kernel, eliminating all the power optimizations, so as to optimize it for RT applications? If we continue like this, soon Linux will only be used for writing emails and using OpenOffice.
There is no need to dive into the kernel. All of the power saving kernel options are already set in my optimisations via the kernel boot options. You would just shorten your kernel boot string.
Grandixximo proved that a custom 6.3 kernel I built a long time ago no longer makes any difference now we understand how to configure a modern kernel.. Having run most kernels since 5.10, latency has actually improved. My original J1900 from 8-10 years ago was at around 130k ns jitter is now down to about 50k or less when optimised.
What has changed is all the networking power settings that need to be carefully mitigated. The problem here is by definition networking was never designed to be real time, but to be a forwarding type of communication protocol through hundreds of switches around the internet. So network drivers are not real time.
You could write your own driver using the DDPK www.dpdk.org/ which eliminates the latency from interrupt context switching and uses polling instead. But it still isn't real time. We are not doing High Frequency Trading where every millisecond of latency affects financial returns so this is not necessary in a CNC environment.
You could use Time Sensitive Networking (TSN) which is now in the kernel and supported by Ethercat but its hardware dependent so your slave needs to support it. tsn.readthedocs.io/
Remember PREMPT_RT is not fast, its deterministic (reliable and on time) which is exactly what we need for our servo thread.
Last edit: 18 Apr 2026 19:13 by rodw.
Please Log in or Create an account to join the conversation.
Time to create page: 0.246 seconds