Search Results (Searched for: raspberry)
- Ul
- Ul
27 Nov 2025 20:05 - 27 Nov 2025 20:08
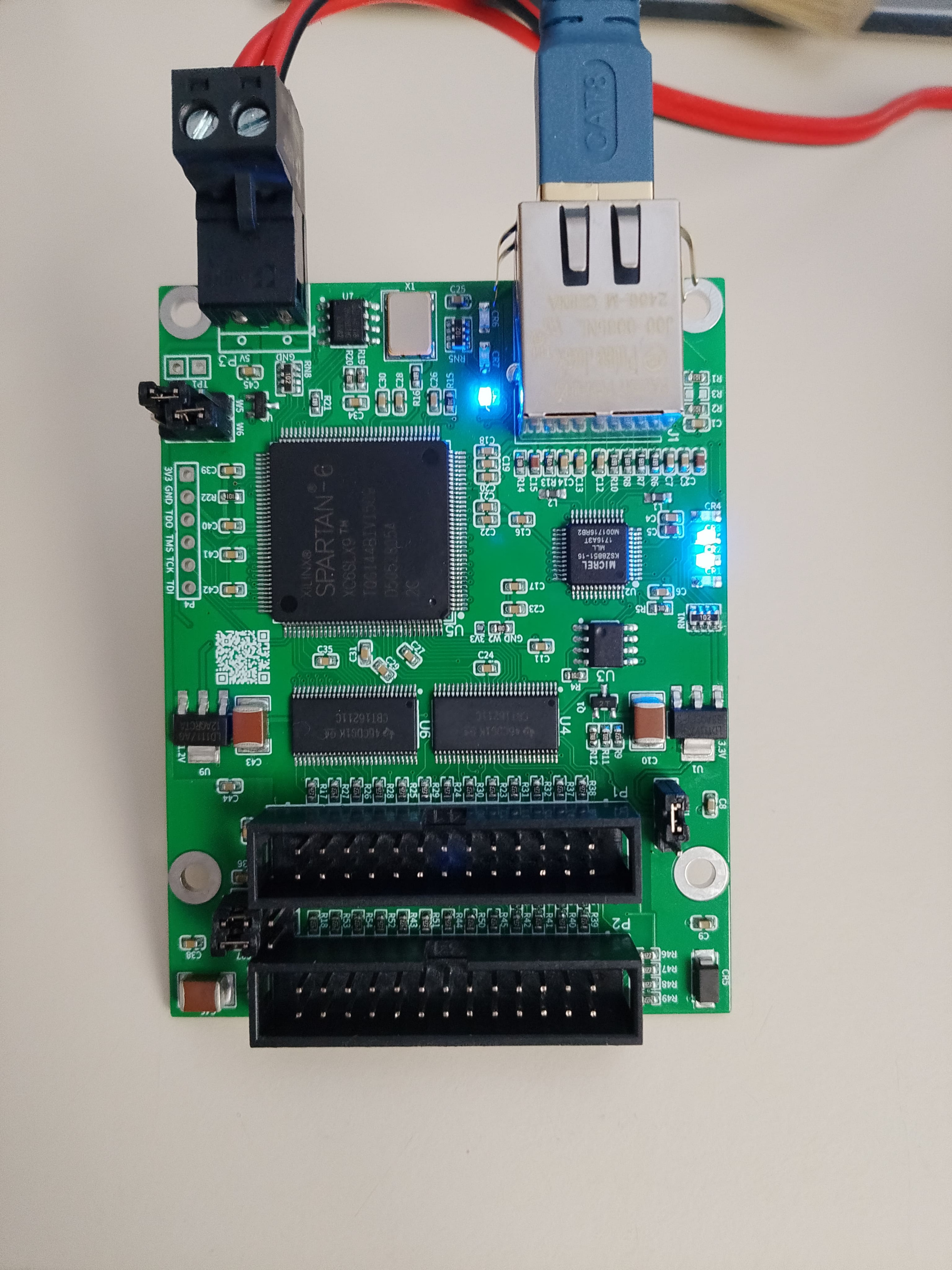
Replied by Ul on topic Chinese Mesa 7I92 from aliexpress NEW
Chinese Mesa 7I92 from aliexpress NEW
Category: Driver Boards

- meister
- meister
25 Nov 2025 05:47 - 25 Nov 2025 05:57
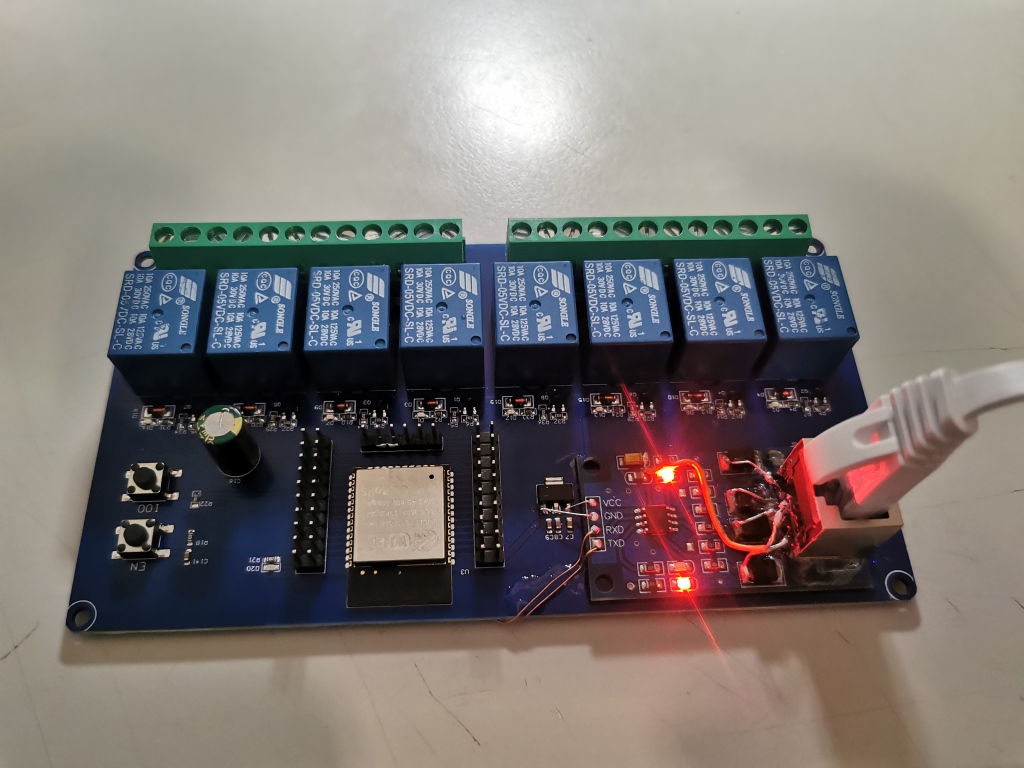
SmartSerial on cheap ESP32-8ch-Relais Card was created by meister
SmartSerial on cheap ESP32-8ch-Relais Card
Category: Driver Boards
- meister
- meister
24 Nov 2025 07:57
Replied by meister on topic Tipps für aktuelle LinuxCNC Hardware gesucht
Tipps für aktuelle LinuxCNC Hardware gesucht
Category: Deutsch
- unknown
- unknown
24 Nov 2025 01:59
Replied by unknown on topic Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Category: Gmoccapy
- garulus
- garulus
23 Nov 2025 20:06 - 23 Nov 2025 21:36
Replied by garulus on topic Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Category: Gmoccapy
- zz912

23 Nov 2025 18:59
Replied by zz912 on topic Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Category: Gmoccapy
- garulus
- garulus
23 Nov 2025 18:45
- Ul
- Ul
21 Nov 2025 12:52 - 21 Nov 2025 13:26
Replied by Ul on topic Tipps für aktuelle LinuxCNC Hardware gesucht
Tipps für aktuelle LinuxCNC Hardware gesucht
Category: Deutsch
- dgdodo
- dgdodo
21 Nov 2025 09:19
Replied by dgdodo on topic [SOLVED] Backlash issues on Y-AXIS
[SOLVED] Backlash issues on Y-AXIS
Category: Advanced Configuration
- EdWorks
19 Nov 2025 01:46
- abs32
- abs32
18 Nov 2025 15:01 - 18 Nov 2025 15:20
Replied by abs32 on topic Installation v2.9.7 linuxcnc in November 2025.
Installation v2.9.7 linuxcnc in November 2025.
Category: Installing LinuxCNC
- unknown
- unknown
16 Nov 2025 02:30 - 16 Nov 2025 02:33
Replied by unknown on topic I think StepConf does not work for my installation?
I think StepConf does not work for my installation?
Category: StepConf Wizard
- EdWorks
16 Nov 2025 01:29 - 16 Nov 2025 01:33
I think StepConf does not work for my installation? was created by EdWorks
I think StepConf does not work for my installation?
Category: StepConf Wizard
- unknown
- unknown
12 Nov 2025 05:44
Replied by unknown on topic Experimental raspios Linuxcnc Trixie images.
Experimental raspios Linuxcnc Trixie images.
Category: Installing LinuxCNC
- OBi
- OBi
12 Nov 2025 01:12
Time to create page: 0.899 seconds